También podría gustarte
- UF1966 - Operaciones auxiliares en el mantenimiento de equipos electrónicosDe EverandUF1966 - Operaciones auxiliares en el mantenimiento de equipos electrónicosCalificación: 5 de 5 estrellas5/5 (1)
- Controles Eléctricos Contactores ArrancadoresDocumento15 páginasControles Eléctricos Contactores ArrancadorescampoaAún no hay calificaciones
- UF1445 - Realización de las intervenciones necesarias para el mantenimiento de las instalaciones eléctricas en el entorno de edificios y con fines especialesDe EverandUF1445 - Realización de las intervenciones necesarias para el mantenimiento de las instalaciones eléctricas en el entorno de edificios y con fines especialesAún no hay calificaciones
- Evidencia 2 Interruptores ElectromagneticosDocumento15 páginasEvidencia 2 Interruptores ElectromagneticosVictor LiconaAún no hay calificaciones
- Taller #2 PLC: Presentado Por: BRICEÑO, LUIS C.I: 30.093.152Documento89 páginasTaller #2 PLC: Presentado Por: BRICEÑO, LUIS C.I: 30.093.152Luis BriceñoAún no hay calificaciones
- SCE Equipo5 Practica#1Documento11 páginasSCE Equipo5 Practica#1Antonio Joksan Palacios IñiguezAún no hay calificaciones
- Evidencia 2 Interruptores ElectromagneticosDocumento14 páginasEvidencia 2 Interruptores ElectromagneticosVictor LiconaAún no hay calificaciones
- Tabajo Vaccaro 2 - Documentos de GoogleDocumento3 páginasTabajo Vaccaro 2 - Documentos de GoogleTomas BastideAún no hay calificaciones
- Relé y su aplicación en protección de sistemas de potenciaDocumento23 páginasRelé y su aplicación en protección de sistemas de potenciaJordan Castillo FiestasAún no hay calificaciones
- PROTEDocumento4 páginasPROTEBrayan jesús Del porte mazariegosAún no hay calificaciones
- Elementos de ControlDocumento13 páginasElementos de ControlDiana Carolina VillacisAún no hay calificaciones
- Elementos ElectricosDocumento5 páginasElementos ElectricosYahir GaytanAún no hay calificaciones
- Lab 2 2023 - 085244Documento7 páginasLab 2 2023 - 085244Angelis CanoAún no hay calificaciones
- Carlos Andres Valencia Articulo de Electronica de Pontencia MDocumento4 páginasCarlos Andres Valencia Articulo de Electronica de Pontencia MMartinAún no hay calificaciones
- Taller Electromecanico 3Documento4 páginasTaller Electromecanico 3Sofia CardenasAún no hay calificaciones
- Taller Electromecanica 03 B PresentrDocumento24 páginasTaller Electromecanica 03 B PresentrClaison Torres100% (2)
- Clase 4 Control y AutomatismoDocumento14 páginasClase 4 Control y AutomatismoCesar MateoAún no hay calificaciones
- Equipo 3Documento28 páginasEquipo 3La Fe SHAún no hay calificaciones
- Presentacion IdentificacionDocumento35 páginasPresentacion IdentificacionKEVIN FRANCISCO ALVAREZ PEREZAún no hay calificaciones
- ELECTRICIDADDocumento39 páginasELECTRICIDADCAMILA PELAEZAún no hay calificaciones
- Contador y Relés de Mando AutomatizaciónDocumento7 páginasContador y Relés de Mando AutomatizaciónLady Brigette Barzola TorresAún no hay calificaciones
- El Relé y Su Aplicación en La Protección de Sistemas de Potencia.Documento28 páginasEl Relé y Su Aplicación en La Protección de Sistemas de Potencia.Choque A Wilmer100% (1)
- Contactores y Temporizadores AutomáticosDocumento17 páginasContactores y Temporizadores AutomáticosChristian FloresAún no hay calificaciones
- Introduccion A La Electronica de Potencia (SM)Documento31 páginasIntroduccion A La Electronica de Potencia (SM)Luis SanchezAún no hay calificaciones
- Control de Motores Activados Con AC (1753)Documento24 páginasControl de Motores Activados Con AC (1753)Ivana HernandezAún no hay calificaciones
- Aplicaciones de Los RelevadoresDocumento3 páginasAplicaciones de Los RelevadoresUriel FarfanAún no hay calificaciones
- Curso Protecciones Media y Baja Tension - Compress.3Documento10 páginasCurso Protecciones Media y Baja Tension - Compress.3Ramon TrujilloAún no hay calificaciones
- Aparatos de Maniobra EléctricaDocumento11 páginasAparatos de Maniobra EléctricaGarcia MarioAún no hay calificaciones
- Lab Sistemas de Proteccion Electrica U.T 1Documento5 páginasLab Sistemas de Proteccion Electrica U.T 1Danni AlcAviAún no hay calificaciones
- Actividad 1 Interruptores de DesconexiónDocumento19 páginasActividad 1 Interruptores de Desconexióneduardoacevedo793Aún no hay calificaciones
- Cómo funcionan los relés y sus aplicacionesDocumento3 páginasCómo funcionan los relés y sus aplicacionesAngelica GuijarroAún no hay calificaciones
- Expo RelevadoresEquipo 7Documento13 páginasExpo RelevadoresEquipo 7Sammy DiosabotAún no hay calificaciones
- Elementos Primarios de Una SubestaciónDocumento6 páginasElementos Primarios de Una SubestaciónKev UicabAún no hay calificaciones
- Informe TecnicoDocumento2 páginasInforme TecnicoDiego Reyes VivancoAún no hay calificaciones
- M3S1 MANTIENE EN OPERACIÓN CIRCUITOS DE CONTROL ELECTROMAGNETICODocumento5 páginasM3S1 MANTIENE EN OPERACIÓN CIRCUITOS DE CONTROL ELECTROMAGNETICOirvanthAún no hay calificaciones
- Tema 2 Maniobra y Protección de Motores - Automatismos PDFDocumento92 páginasTema 2 Maniobra y Protección de Motores - Automatismos PDFAlejandro Fernández RoldánAún no hay calificaciones
- 2014 SECCIONADORESv02Documento64 páginas2014 SECCIONADORESv02JUAN PABLOAún no hay calificaciones
- Rele y TemporizadorDocumento13 páginasRele y Temporizadordanez341Aún no hay calificaciones
- Protecciones eléctricas: Relés, fusibles, seccionadores e interruptoresDocumento48 páginasProtecciones eléctricas: Relés, fusibles, seccionadores e interruptoresChristopher Andres Perez Beltran100% (1)
- Lab. 03 Materiales eléctricos Pulsadores - SelectoresDocumento12 páginasLab. 03 Materiales eléctricos Pulsadores - SelectoresNayely A. CalderónAún no hay calificaciones
- Hernandez Briones Rigoberto Previo Practica 3y 4 Control ElectromecanicoDocumento6 páginasHernandez Briones Rigoberto Previo Practica 3y 4 Control ElectromecanicoRigoberto Hernandez BrionesAún no hay calificaciones
- Tarea 1 SeiDocumento6 páginasTarea 1 SeiIsa ReyesAún no hay calificaciones
- SEP - Suministros IV Ver03Documento27 páginasSEP - Suministros IV Ver03RichardManriqueBAún no hay calificaciones
- Automatización por contactoresDocumento64 páginasAutomatización por contactoresAndresLozadaAún no hay calificaciones
- Elementos de Control y Protección de Motores EléctricosDocumento16 páginasElementos de Control y Protección de Motores EléctricosSIRLEITH ELENA BROCKMAN MARTINEZAún no hay calificaciones
- 3.5 Dde MantenimientoDocumento21 páginas3.5 Dde MantenimientoMANUEL DE JESUS GONZALEZ MARTINEZAún no hay calificaciones
- Actuadores y Dispositivos de ManiobraDocumento12 páginasActuadores y Dispositivos de Maniobrajony_87_96Aún no hay calificaciones
- PROYECTO FINAL Electronica IndustrialDocumento18 páginasPROYECTO FINAL Electronica IndustrialLeonardo Alejandro Vargas TorrezAún no hay calificaciones
- Tarea Maquinas Asignación #2Documento12 páginasTarea Maquinas Asignación #2oswaldoAún no hay calificaciones
- Contactores y RelesDocumento5 páginasContactores y Relesjose yancarloAún no hay calificaciones
- La Coordinación de Los Relés de Sobre Corriente Es Muy Importante para La Correcta Actuación de Las Protecciones Ante Una FallaDocumento11 páginasLa Coordinación de Los Relés de Sobre Corriente Es Muy Importante para La Correcta Actuación de Las Protecciones Ante Una FallaPablo OjedaAún no hay calificaciones
- Tema - Elementos Electrónicos de Seguridad EléctricosDocumento22 páginasTema - Elementos Electrónicos de Seguridad EléctricosJOSE ARMANDO OROZCO GUZMANAún no hay calificaciones
- Practica 4 Maquinas ElectricasDocumento13 páginasPractica 4 Maquinas Electricasaxl230Aún no hay calificaciones
- Presentacion RelevadoresDocumento10 páginasPresentacion Relevadoresaldo.ferretizgallardoAún no hay calificaciones
- Práctica de Circuitos Eléctricos A ReléDocumento22 páginasPráctica de Circuitos Eléctricos A ReléVíctor Gabriel Benítez CastilloAún no hay calificaciones
- Informe 5Documento10 páginasInforme 5CarlosCaracelaMinayaAún no hay calificaciones
- Investigación 3. Ingenieria EléctricaDocumento17 páginasInvestigación 3. Ingenieria EléctricaPaola QuintanillaAún no hay calificaciones
- Universidad Autónoma de Nuevo León: "Evidencia 1"Documento10 páginasUniversidad Autónoma de Nuevo León: "Evidencia 1"Angel GarciaAún no hay calificaciones
- Reles TiposDocumento17 páginasReles TiposAndy HatsAún no hay calificaciones
- Montores Patraca Mario U - 2Documento38 páginasMontores Patraca Mario U - 2israel laraAún no hay calificaciones
- Práctica 8 EjemploDocumento4 páginasPráctica 8 EjemploBrayan Arturo Gaytan ReyesAún no hay calificaciones
- Ceramicas y Composites - Equipo ADocumento15 páginasCeramicas y Composites - Equipo ABrayan Arturo Gaytan ReyesAún no hay calificaciones
- Manufactura Asistida Por ComputadoraDocumento14 páginasManufactura Asistida Por ComputadoraBrayan Arturo Gaytan ReyesAún no hay calificaciones
- Practica 1 Sistemas AutomatizadosDocumento9 páginasPractica 1 Sistemas AutomatizadosBrayan Arturo Gaytan ReyesAún no hay calificaciones
- Ejercicios Automatizados PDFDocumento33 páginasEjercicios Automatizados PDFBrayan Arturo Gaytan ReyesAún no hay calificaciones
- Solidosncritalinos 245f73948ebe00eDocumento24 páginasSolidosncritalinos 245f73948ebe00eBrayan Arturo Gaytan ReyesAún no hay calificaciones
- Transformador y Su EficienciaDocumento26 páginasTransformador y Su EficienciaBrayan Arturo Gaytan ReyesAún no hay calificaciones
- Cuadro-ComparativoDocumento1 páginaCuadro-ComparativoBrayan Arturo Gaytan Reyes100% (1)
- Noticias Finacieras Gaytan Reyes Brian ArturoDocumento7 páginasNoticias Finacieras Gaytan Reyes Brian ArturoBrayan Arturo Gaytan ReyesAún no hay calificaciones
- Capacidad Desemp ProcesoDocumento4 páginasCapacidad Desemp ProcesoBrayan Arturo Gaytan ReyesAún no hay calificaciones
- Cico Procesoadmision 2019 PDFDocumento3 páginasCico Procesoadmision 2019 PDFBrayan Arturo Gaytan ReyesAún no hay calificaciones
- Orden y Limpieza 5sDocumento28 páginasOrden y Limpieza 5sMaick Gamarra Rios100% (1)
- Disribución de FrecuenciasDocumento4 páginasDisribución de FrecuenciasBrayan Arturo Gaytan ReyesAún no hay calificaciones
- Unidad de Mantenimiento NeumaticaDocumento5 páginasUnidad de Mantenimiento NeumaticaBrayan Arturo Gaytan ReyesAún no hay calificaciones
- Capacidad Desemp ProcesoDocumento4 páginasCapacidad Desemp ProcesoBrayan Arturo Gaytan ReyesAún no hay calificaciones
- Capacidad Desemp ProcesoDocumento4 páginasCapacidad Desemp ProcesoBrayan Arturo Gaytan ReyesAún no hay calificaciones
- Capacidad Desemp ProcesoDocumento32 páginasCapacidad Desemp Procesodalila_roblesAún no hay calificaciones
- Diferencia Entre Calor y TemperaturaDocumento4 páginasDiferencia Entre Calor y TemperaturaBrayan Arturo Gaytan ReyesAún no hay calificaciones
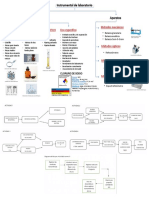
- Mapa Material de LaboratorioDocumento2 páginasMapa Material de LaboratorioBrayan Arturo Gaytan ReyesAún no hay calificaciones
- Biologia ImportanteDocumento1 páginaBiologia ImportanteBrayan Arturo Gaytan ReyesAún no hay calificaciones
- Practica 4 Quimica AplicadaDocumento10 páginasPractica 4 Quimica AplicadaBrayan Arturo Gaytan Reyes100% (1)
- Colegio de Bachilleres Plantel 12Documento4 páginasColegio de Bachilleres Plantel 12Brayan Arturo Gaytan ReyesAún no hay calificaciones
- Practica Computacional 1Documento9 páginasPractica Computacional 1Brayan Arturo Gaytan ReyesAún no hay calificaciones
- Colegio de Bachilleres Plantel 12Documento4 páginasColegio de Bachilleres Plantel 12Brayan Arturo Gaytan ReyesAún no hay calificaciones
- Exergia ExposicionDocumento8 páginasExergia ExposicionDimasDanielArriecheMoranteAún no hay calificaciones
- AE d1. Fundamentos 2023fDocumento46 páginasAE d1. Fundamentos 2023fIng. Andres CruzAún no hay calificaciones
- Experimentro 2. Régimen de Flujo en FluidoDocumento6 páginasExperimentro 2. Régimen de Flujo en Fluidomurano564Aún no hay calificaciones
- Tipos de Corrosion PDFDocumento122 páginasTipos de Corrosion PDFMilnerSegoviaSegoviaAún no hay calificaciones
- Portafolio 3Documento7 páginasPortafolio 3serafin felixAún no hay calificaciones
- Taller de Casos PrácticosDocumento4 páginasTaller de Casos PrácticosClara SilvermanAún no hay calificaciones
- Compresor A Tornillo para NH3Documento20 páginasCompresor A Tornillo para NH3CristhianLazarteCorralesAún no hay calificaciones
- Estequiometria MedicinaDocumento5 páginasEstequiometria MedicinaAndres Villarruel CotrinaAún no hay calificaciones
- Problemas de Ingenieria Termica Aplicada PDFDocumento160 páginasProblemas de Ingenieria Termica Aplicada PDFLuisinho LC67% (3)
- ColorimetriaDocumento11 páginasColorimetriajose juan mendezAún no hay calificaciones
- 04 Memoria Descriptiva Instalaciones ElectricasDocumento3 páginas04 Memoria Descriptiva Instalaciones ElectricasBrayan JaramilloAún no hay calificaciones
- Sistemas Eléctricos de Potencia IIDocumento121 páginasSistemas Eléctricos de Potencia IIgospel00150% (2)
- Planilla de Excel para Presupuesto Anual MensualDocumento1 páginaPlanilla de Excel para Presupuesto Anual MensualcarlosAún no hay calificaciones
- Recursos y Reservas de CarbónDocumento6 páginasRecursos y Reservas de CarbónguidoAún no hay calificaciones
- Control de Nivel y Purga PDFDocumento56 páginasControl de Nivel y Purga PDFGonzalo Matias MartínezAún no hay calificaciones
- Bombas CentrifugasDocumento26 páginasBombas CentrifugasSUGEY HEYDI CALLO HUANACOAún no hay calificaciones
- Control de Choferes Mes de JunioDocumento20 páginasControl de Choferes Mes de JunioROXANA ELIZABETH BUSTAMANTE DIAZAún no hay calificaciones
- A-Ar127s Reciclaje de Materias Organicas Fao PDFDocumento258 páginasA-Ar127s Reciclaje de Materias Organicas Fao PDFAna MartinezAún no hay calificaciones
- Diferencia Anticorrosivos Vrs RefrigeranteDocumento9 páginasDiferencia Anticorrosivos Vrs Refrigerantejuan moralesAún no hay calificaciones
- NORMAS INVIAS Capitulo 5Documento34 páginasNORMAS INVIAS Capitulo 5David Gomez100% (1)
- Calculo de CatenariaDocumento5 páginasCalculo de CatenariaSalvador Mayorga100% (2)
- Memoria 2022 ED PerúDocumento345 páginasMemoria 2022 ED Perúra7l7billy7z7rate7peAún no hay calificaciones
- Cotizacion Motor Cummins 350 Piston 555 10 Julio 2017Documento1 páginaCotizacion Motor Cummins 350 Piston 555 10 Julio 2017Guillermo CarrilloAún no hay calificaciones
- Trabajo ObligatorioDocumento9 páginasTrabajo ObligatorioZenebe LeulsegedAún no hay calificaciones
- Medidor de Humedad DDocumento9 páginasMedidor de Humedad DMayerly Muñoz100% (1)
- Balance de Energía Destilación FlashDocumento3 páginasBalance de Energía Destilación FlashCesar David Saenz ChaconAún no hay calificaciones
- Tu Factura de Gas: Datos Del ClienteDocumento1 páginaTu Factura de Gas: Datos Del Clientethebailarina manAún no hay calificaciones
- Exposición de Las Características Efectivas de CaudalDocumento2 páginasExposición de Las Características Efectivas de Caudalsam_clon14Aún no hay calificaciones
- Edpe Op F 047 Coy SCN 027 002 1Documento1 páginaEdpe Op F 047 Coy SCN 027 002 1Pedro Paria RamonAún no hay calificaciones
- La revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaDe EverandLa revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaCalificación: 5 de 5 estrellas5/5 (200)
- La invasión de la pseudociencia: Claves para orientarse en un mundo en donde casi todo es posibleDe EverandLa invasión de la pseudociencia: Claves para orientarse en un mundo en donde casi todo es posibleCalificación: 4.5 de 5 estrellas4.5/5 (15)
- La metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceDe EverandLa metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceCalificación: 5 de 5 estrellas5/5 (8)
- Psiconeuroinmunología para la práctica clínicaDe EverandPsiconeuroinmunología para la práctica clínicaCalificación: 5 de 5 estrellas5/5 (4)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Zensorialmente : Dejá que tu cuerpo sea tu cerebroDe EverandZensorialmente : Dejá que tu cuerpo sea tu cerebroAún no hay calificaciones
- Fisiopatología de las enfermedades cardiovascularesDe EverandFisiopatología de las enfermedades cardiovascularesCalificación: 5 de 5 estrellas5/5 (1)
- Disciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreDe EverandDisciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreCalificación: 5 de 5 estrellas5/5 (3)
- Batidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoDe EverandBatidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoCalificación: 5 de 5 estrellas5/5 (2)
- Resumen de Pensar rápido pensar despacio de Daniel KahnemanDe EverandResumen de Pensar rápido pensar despacio de Daniel KahnemanCalificación: 4.5 de 5 estrellas4.5/5 (11)
- Anatomía & 100 estiramientos Esenciales (Color): Técnicas, beneficios, precauciones, consejos, tablas de series, dolenciasDe EverandAnatomía & 100 estiramientos Esenciales (Color): Técnicas, beneficios, precauciones, consejos, tablas de series, dolenciasCalificación: 4.5 de 5 estrellas4.5/5 (21)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (116)
- Borges y la memoria: De "Funes el memorioso" a la neurona de Jennifer AnistonDe EverandBorges y la memoria: De "Funes el memorioso" a la neurona de Jennifer AnistonCalificación: 5 de 5 estrellas5/5 (4)
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDe Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosCalificación: 5 de 5 estrellas5/5 (1)
- Nunca fuimos modernos: Ensayos de antropología simétricaDe EverandNunca fuimos modernos: Ensayos de antropología simétricaAún no hay calificaciones
- Investigación de operaciones: Conceptos fundamentalesDe EverandInvestigación de operaciones: Conceptos fundamentalesCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Cálculo infinitesimal: El lenguaje matemático de la naturalezaDe EverandCálculo infinitesimal: El lenguaje matemático de la naturalezaCalificación: 5 de 5 estrellas5/5 (3)
- Reconstrucción de dientes endodonciados: Pautas de actuación clínicaDe EverandReconstrucción de dientes endodonciados: Pautas de actuación clínicaCalificación: 5 de 5 estrellas5/5 (4)
- Estoicismo y dureza mental: Descubre los secretos psicológicos de la filosofía estoica en la vida moderna. Construir una autodisciplina inquebrantable y hábitos diarios que garanticen el éxitoDe EverandEstoicismo y dureza mental: Descubre los secretos psicológicos de la filosofía estoica en la vida moderna. Construir una autodisciplina inquebrantable y hábitos diarios que garanticen el éxitoCalificación: 4 de 5 estrellas4/5 (23)
- Interpretación del ECG: Una Guía Práctica e Intuitiva para Aprender a Leer el ECG y Diagnosticar y Tratar ArritmiasDe EverandInterpretación del ECG: Una Guía Práctica e Intuitiva para Aprender a Leer el ECG y Diagnosticar y Tratar ArritmiasAún no hay calificaciones
- Desastres y emergencias. Prevención, mitigación y preparaciónDe EverandDesastres y emergencias. Prevención, mitigación y preparaciónCalificación: 4 de 5 estrellas4/5 (5)
- En busca de la mente: El largo camino para comprender la vida mental (y lo que aún queda por descubrir)De EverandEn busca de la mente: El largo camino para comprender la vida mental (y lo que aún queda por descubrir)Calificación: 4.5 de 5 estrellas4.5/5 (3)