También podría gustarte
- Técnicas básicas de mecánica de vehículos. TMVG0109De EverandTécnicas básicas de mecánica de vehículos. TMVG0109Aún no hay calificaciones
- Documento 1Documento13 páginasDocumento 1David Guzmán RodríguezAún no hay calificaciones
- Mantenimiento, preparación y manejo de tractores. AGAH0108De EverandMantenimiento, preparación y manejo de tractores. AGAH0108Aún no hay calificaciones
- Informe Mecánica de Patio Sistemas de DirecciónDocumento9 páginasInforme Mecánica de Patio Sistemas de DirecciónAndrés Bedón0% (1)
- MF1461_2 - Mantenimiento de primer nivel de vehículos de transporte por carreteraDe EverandMF1461_2 - Mantenimiento de primer nivel de vehículos de transporte por carreteraCalificación: 4 de 5 estrellas4/5 (2)
- CremalleraDocumento7 páginasCremalleraBernardo CevallosAún no hay calificaciones
- Manual de DireccionDocumento42 páginasManual de DireccionCecia Iveth Olarte PachecoAún no hay calificaciones
- Accu-211 FormatoalumnotrabajofinalDocumento17 páginasAccu-211 FormatoalumnotrabajofinalJude K DarielaxAún no hay calificaciones
- 8vo SEMANA 3 LOS SISTEMAS DE DIRECCION DE LOS AUTOMOVILES 4P-2020 PDFDocumento15 páginas8vo SEMANA 3 LOS SISTEMAS DE DIRECCION DE LOS AUTOMOVILES 4P-2020 PDFLeonardo CamargoAún no hay calificaciones
- Unidad 4 EP 1 MADocumento6 páginasUnidad 4 EP 1 MAcrisAún no hay calificaciones
- ISISAZ - DIrección - Practica 1Documento13 páginasISISAZ - DIrección - Practica 1Omar Santoyo CamargoAún no hay calificaciones
- Sistema de Dirección-1Documento15 páginasSistema de Dirección-1Lïžêth GïlAún no hay calificaciones
- Sistema de Dirección AutomotrizDocumento11 páginasSistema de Dirección Automotrizeduardo villarrealAún no hay calificaciones
- Sistema de DireccionDocumento12 páginasSistema de DireccionNicole GalvisAún no hay calificaciones
- Sistemas de Direccion y TransmisionDocumento11 páginasSistemas de Direccion y Transmisionlaura roldanAún no hay calificaciones
- Mecanismo de La Dirección MecánicaDocumento10 páginasMecanismo de La Dirección MecánicacramdsAún no hay calificaciones
- Sistema de DireccionDocumento35 páginasSistema de DireccionBryan VelascoAún no hay calificaciones
- El Distema de Direccion Barbaran JuarezDocumento3 páginasEl Distema de Direccion Barbaran JuarezJeferson Jose BARBARAN JUAREZAún no hay calificaciones
- Escuela Industrial Superior "Pedro Domingo Murillo": Instituto TecnológicoDocumento8 páginasEscuela Industrial Superior "Pedro Domingo Murillo": Instituto TecnológicoWilder R. Gutierrez MendozaAún no hay calificaciones
- SistemasDirecciónNeumáticaEléctricaElectrónicaDocumento12 páginasSistemasDirecciónNeumáticaEléctricaElectrónicaWilliamChuquiguangaAún no hay calificaciones
- Fundamento de Mecanica Automotriz - Actividad 4Documento19 páginasFundamento de Mecanica Automotriz - Actividad 4Mauricio Ovalle GarciaAún no hay calificaciones
- Instituto Tecnológico Superior El OroDocumento8 páginasInstituto Tecnológico Superior El OroAndres SanizacaAún no hay calificaciones
- Sistemas Del VehiculoDocumento13 páginasSistemas Del VehiculoROQUEAún no hay calificaciones
- Sistema de DireccionDocumento8 páginasSistema de DireccionYuyiis Florez RamosAún no hay calificaciones
- Guia de Suspension y Direccion N2Documento22 páginasGuia de Suspension y Direccion N2Oscar Gaitan RAún no hay calificaciones
- 2 Sistema de DireccionDocumento17 páginas2 Sistema de DireccionCamila MárquezAún no hay calificaciones
- Diseño - Formula SAEDocumento81 páginasDiseño - Formula SAEAnonymous IdaM5Ed2Aún no hay calificaciones
- Partes Principales de Un AutomovilDocumento21 páginasPartes Principales de Un AutomovilFrederick FabrgasAún no hay calificaciones
- Tipos de DireccionDocumento14 páginasTipos de DireccionPaula AndreaAún no hay calificaciones
- Sistema de DirecciónDocumento10 páginasSistema de DirecciónleydyrebelddAún no hay calificaciones
- ZZZZZZZZZZZZZZZZDocumento11 páginasZZZZZZZZZZZZZZZZJuan Carlos RedmayneAún no hay calificaciones
- Vibraciones AutoDocumento10 páginasVibraciones AutoOrlando RmAún no hay calificaciones
- Trabajo 1 y 2 Metodo de ProyectoDocumento2 páginasTrabajo 1 y 2 Metodo de ProyectoAntony ObregónAún no hay calificaciones
- Avt 2021062017111111 Phpdfockk 9Documento6 páginasAvt 2021062017111111 Phpdfockk 9Jose Darwin Leon MendezAún no hay calificaciones
- Kevin Lema Mecanica de PatioDocumento7 páginasKevin Lema Mecanica de PatioKevin LemaAún no hay calificaciones
- Sistema de DirecciónDocumento3 páginasSistema de DirecciónSebastian FreireAún no hay calificaciones
- Ta Sistema de Direccion Hidraulica (Fluidos)Documento35 páginasTa Sistema de Direccion Hidraulica (Fluidos)THAYLOR DAVITHSON MEZA BORJAAún no hay calificaciones
- Expo Grupo 5Documento22 páginasExpo Grupo 5Mauricio Ricardo Vela AlatristaAún no hay calificaciones
- Sistema de DireccionDocumento35 páginasSistema de DireccionGualberto Sayali TaquichiriAún no hay calificaciones
- 05 El Sistema de Dirección Permite Al Conductor Controlar La Trayectoria Del Vehículo Fácilmente (Lectura Complementaria)Documento3 páginas05 El Sistema de Dirección Permite Al Conductor Controlar La Trayectoria Del Vehículo Fácilmente (Lectura Complementaria)Ignacio Zuñiga medinaAún no hay calificaciones
- DirecciónDocumento5 páginasDirecciónJavier VGAún no hay calificaciones
- Resumen Suspencion-Direccion Grupo 4Documento6 páginasResumen Suspencion-Direccion Grupo 4Limaico BryanAún no hay calificaciones
- Direccion 2Documento12 páginasDireccion 2Jhon Jairo Mantilla VillamizarAún no hay calificaciones
- Sistema de DireccionDocumento186 páginasSistema de DireccionDavid ParariAún no hay calificaciones
- Defensa Direccion AsistidaDocumento39 páginasDefensa Direccion AsistidaNilsen Alejandro Cirque ManuelAún no hay calificaciones
- 2sesion 11suspDocumento12 páginas2sesion 11suspamilcar mallmaAún no hay calificaciones
- Sindicato de Choferes Profesionales Del Guabo DireccionDocumento10 páginasSindicato de Choferes Profesionales Del Guabo DireccionPaúl CruzAún no hay calificaciones
- El Sistema de DirecciónDocumento2 páginasEl Sistema de DirecciónKleber Huarancca QAún no hay calificaciones
- Automotriz DiapositivaDocumento107 páginasAutomotriz Diapositivaraul rioja azaldeAún no hay calificaciones
- Direccion HidráulicaDocumento19 páginasDireccion HidráulicaPepe Rodríguez100% (1)
- Direccion y SuspensionDocumento25 páginasDireccion y Suspensionandres AndradeAún no hay calificaciones
- DirecciónDocumento28 páginasDirecciónSEBASTIAN FELIPE GOMEZ CELISAún no hay calificaciones
- Celador Conductor SAS Modulo 7 Tema 13Documento24 páginasCelador Conductor SAS Modulo 7 Tema 13Virtudes Sanchez OrozcoAún no hay calificaciones
- Informe Sistemas de Direcciòn y TransmisionDocumento21 páginasInforme Sistemas de Direcciòn y TransmisionrodriguezcastromanuelandresAún no hay calificaciones
- Qué Es y Cómo Funciona El Sistema de Dirección Mecanico de Un VehículoDocumento9 páginasQué Es y Cómo Funciona El Sistema de Dirección Mecanico de Un VehículoMILTON DAVID OCHOA MADRIDAún no hay calificaciones
- Marco Teorico Capìtulo 2Documento6 páginasMarco Teorico Capìtulo 2calani.joseAún no hay calificaciones
- Sistemas de Frenos, Dirección y Transmisión, Clasif, Atrop. MoraHerreraClaudiaIvette.801Documento17 páginasSistemas de Frenos, Dirección y Transmisión, Clasif, Atrop. MoraHerreraClaudiaIvette.801Claudia IvetteAún no hay calificaciones
- Marco Teórico 1Documento7 páginasMarco Teórico 1orlando gallardo cardozoAún no hay calificaciones
- Capitulo1 Eps HyundaiDocumento43 páginasCapitulo1 Eps Hyundai08088338100% (1)
- Recuperacion TecnologiaDocumento7 páginasRecuperacion TecnologiaMaria Camila Velasco CabuyalesAún no hay calificaciones
- N450Documento2 páginasN450Daniel Guillermo Mamani Aruquipa100% (1)
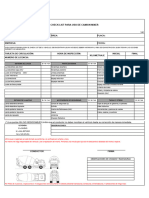
- Check in de Revisión de Camion MixerDocumento4 páginasCheck in de Revisión de Camion MixerSergioAún no hay calificaciones
- Sistemas de sujección pasiva: módulos de airbag, control y funcionamientoDocumento16 páginasSistemas de sujección pasiva: módulos de airbag, control y funcionamientoMarcos GonzalezAún no hay calificaciones
- Ficha Tecnica C 180 AvantgardeDocumento1 páginaFicha Tecnica C 180 AvantgardeFerAún no hay calificaciones
- Seguridad en El ScooptramDocumento23 páginasSeguridad en El ScooptramDiego Alexander Arenas Arapa67% (3)
- SusukiDocumento35 páginasSusukiGuillermo Nuñez100% (2)
- Embragues CentrifugosDocumento22 páginasEmbragues CentrifugosPablo SanchezAún no hay calificaciones
- Subasta N°19 - Catalogo de VehiculosDocumento48 páginasSubasta N°19 - Catalogo de VehiculosJohn PillacaAún no hay calificaciones
- Om Ng-Chevrolet Malibu My16-Es MXDocumento471 páginasOm Ng-Chevrolet Malibu My16-Es MXDaniel VargasAún no hay calificaciones
- Soporte técnico para transmisiones automáticasDocumento112 páginasSoporte técnico para transmisiones automáticasjorge P, Sanchez100% (2)
- Cotizacion Atos Comfort 2022 - MPMNDocumento3 páginasCotizacion Atos Comfort 2022 - MPMNMichael Cam riverosAún no hay calificaciones
- Autorizacion CirculacionDocumento14 páginasAutorizacion CirculacionMariana LinaresAún no hay calificaciones
- Todo Terreno 4x4 #177 - Marzo 2015Documento84 páginasTodo Terreno 4x4 #177 - Marzo 2015wjjgm19100% (1)
- Ford Focus Exe 2.0 GhiaDocumento7 páginasFord Focus Exe 2.0 GhiaGuillermo QuinterosAún no hay calificaciones
- Ficha Tecnica Revenge Dynamik TechDocumento1 páginaFicha Tecnica Revenge Dynamik TechEmilio Melo TreviñoAún no hay calificaciones
- Bicicletas militares ofertaDocumento3 páginasBicicletas militares ofertaTrabajo TareaAún no hay calificaciones
- Retroexcavadora Case 580 Super M: ficha técnica y mantenimientoDocumento20 páginasRetroexcavadora Case 580 Super M: ficha técnica y mantenimientoRonaldo MezaAún no hay calificaciones
- ALTERNADORDocumento11 páginasALTERNADORJesús RinconAún no hay calificaciones
- Mantenimiento PM4 42000 km JAC T8/T6Documento1 páginaMantenimiento PM4 42000 km JAC T8/T6edward giancarlo maytaAún no hay calificaciones
- Ford Motor Company y Su Sistema de ContrDocumento43 páginasFord Motor Company y Su Sistema de ContrBrigido ValerioAún no hay calificaciones
- Especificaciones motor Fiat Ducato 2.8 D/TDDocumento3 páginasEspecificaciones motor Fiat Ducato 2.8 D/TDGera BdAún no hay calificaciones
- Captando a la Gen Y con autos innovadoresDocumento3 páginasCaptando a la Gen Y con autos innovadoresLIZETH VALERIA TRIVINO CUELLARAún no hay calificaciones
- Motor Bóxer - Wikipedia, La Enciclopedia LibreDocumento3 páginasMotor Bóxer - Wikipedia, La Enciclopedia LibreJorge Hernandez RiveraAún no hay calificaciones
- Turbo de Geometra Variable PDFDocumento94 páginasTurbo de Geometra Variable PDFfrankAún no hay calificaciones
- ARANDELA PRESION ABRAZADERAS CAJADocumento130 páginasARANDELA PRESION ABRAZADERAS CAJAfrenos zamoraAún no hay calificaciones
- @@uni-K 110 Julio 2014 PDFDocumento71 páginas@@uni-K 110 Julio 2014 PDFJimJiangAún no hay calificaciones
- Atf Dexron Ii TDSDocumento1 páginaAtf Dexron Ii TDSAlejandro ColmenaresAún no hay calificaciones
- 4f27e+focus Manual ReparacionDocumento320 páginas4f27e+focus Manual Reparacionskynet1070330691% (53)
- DespieceDocumento6 páginasDespiecejose carlos silveiraAún no hay calificaciones
- Ruedas y NeumaticosDocumento45 páginasRuedas y NeumaticosJesus VelardeAún no hay calificaciones
- Cómo hacer aviones de papel y otros objetos voladoresDe EverandCómo hacer aviones de papel y otros objetos voladoresAún no hay calificaciones
- GuíaBurros Comprar un coche eléctrico: Todo lo que debes saber sobre los coches eléctricosDe EverandGuíaBurros Comprar un coche eléctrico: Todo lo que debes saber sobre los coches eléctricosCalificación: 5 de 5 estrellas5/5 (2)
- UF1213 - Técnicas de mecanizado y metrologíaDe EverandUF1213 - Técnicas de mecanizado y metrologíaCalificación: 4 de 5 estrellas4/5 (5)
- El método de los elementos finitos: Un enfoque teórico prácticoDe EverandEl método de los elementos finitos: Un enfoque teórico prácticoCalificación: 3 de 5 estrellas3/5 (4)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Flujo de fluidos e intercambio de calorDe EverandFlujo de fluidos e intercambio de calorCalificación: 1 de 5 estrellas1/5 (1)
- Mecánica para ingenieros: cinemática: Apuntes de preparación de clasesDe EverandMecánica para ingenieros: cinemática: Apuntes de preparación de clasesAún no hay calificaciones
- Manual técnico de refrigerantesDe EverandManual técnico de refrigerantesCalificación: 4 de 5 estrellas4/5 (4)
- Manual de combustibles alternativos y tecnología automotrizDe EverandManual de combustibles alternativos y tecnología automotrizCalificación: 5 de 5 estrellas5/5 (6)
- MF0624_1 - Técnicas básicas de electricidad de vehículosDe EverandMF0624_1 - Técnicas básicas de electricidad de vehículosCalificación: 5 de 5 estrellas5/5 (2)
- Las Edades del Automóvil (historia del automóvil)De EverandLas Edades del Automóvil (historia del automóvil)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- MF1461_2 - Mantenimiento de primer nivel de vehículos de transporte por carreteraDe EverandMF1461_2 - Mantenimiento de primer nivel de vehículos de transporte por carreteraCalificación: 4 de 5 estrellas4/5 (2)
- UF0902 - Caracterización de instalaciones de climatizaciónDe EverandUF0902 - Caracterización de instalaciones de climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- Diseño de vigas y muros en mamposteria reforzadaDe EverandDiseño de vigas y muros en mamposteria reforzadaCalificación: 3.5 de 5 estrellas3.5/5 (2)
- UF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposDe EverandUF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposCalificación: 5 de 5 estrellas5/5 (1)
- Casos de estudio de termodinámica: Solución mediante el uso de ASPENHYSYSDe EverandCasos de estudio de termodinámica: Solución mediante el uso de ASPENHYSYSCalificación: 4.5 de 5 estrellas4.5/5 (7)
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoDe EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoCalificación: 4 de 5 estrellas4/5 (4)
- UF0565 - Eficiencia energética en las instalaciones de calefacción y ACS en los edificiosDe EverandUF0565 - Eficiencia energética en las instalaciones de calefacción y ACS en los edificiosAún no hay calificaciones
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasDe EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasCalificación: 5 de 5 estrellas5/5 (1)
- Mecánica del medio continuo: una iniciaciónDe EverandMecánica del medio continuo: una iniciaciónCalificación: 3 de 5 estrellas3/5 (1)
- MF1165_3 - Instalaciones de ventilación-ExtracciónDe EverandMF1165_3 - Instalaciones de ventilación-ExtracciónAún no hay calificaciones