También podría gustarte
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311De EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Calificación: 4.5 de 5 estrellas4.5/5 (2)
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDe EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311De EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Calificación: 2 de 5 estrellas2/5 (1)
- Teoria Del ColorDocumento9 páginasTeoria Del ColorCarlos Martinez100% (1)
- Dale 3100Documento4 páginasDale 3100Jose AlbertoAún no hay calificaciones
- Control Por EnclavamientoDocumento10 páginasControl Por EnclavamientoAlberto SubelzaAún no hay calificaciones
- Montaje de instalaciones automatizadas. ELEE0109De EverandMontaje de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- La Placa ElectrónicaDocumento18 páginasLa Placa ElectrónicaAlejo Nahuel Perez Demaestri100% (1)
- Sistemas de Control - Lazo Abierto - LazoDocumento10 páginasSistemas de Control - Lazo Abierto - LazoDaniel Ch.Aún no hay calificaciones
- 1.1-Etapas de Un AutomatismoDocumento29 páginas1.1-Etapas de Un AutomatismoJesús Alejandro100% (3)
- Sistema de Control AutomáticoDocumento7 páginasSistema de Control AutomáticoErnesto Rodriguez Cuevas0% (1)
- Tarea2 Cuestionario Control On-Off PDFDocumento8 páginasTarea2 Cuestionario Control On-Off PDFYamil JuarezAún no hay calificaciones
- Control Electrónico en Aire AcondicionadoDocumento16 páginasControl Electrónico en Aire Acondicionadolmelendezi100% (1)
- Sistema de Controles SecuencialesDocumento19 páginasSistema de Controles Secuencialesdaniel jordanAún no hay calificaciones
- Hernandez Barrera Rosslim M15S3AI5Documento8 páginasHernandez Barrera Rosslim M15S3AI5Flor Barrera HernandezAún no hay calificaciones
- Tfg-O 476Documento60 páginasTfg-O 476Sandra GaleanaAún no hay calificaciones
- PLC ExpoDocumento52 páginasPLC ExpoRoberto Manuel Perezfana MartínezAún no hay calificaciones
- Vii - Automatizacion de FlotacionDocumento68 páginasVii - Automatizacion de FlotacionLuis Sebastián Ford100% (2)
- Integración de Sistemas AutomaticosDocumento24 páginasIntegración de Sistemas AutomaticosSmuert Poot VazquezAún no hay calificaciones
- Sistemas Eléctricos de Control.Documento8 páginasSistemas Eléctricos de Control.sugey alondraAún no hay calificaciones
- Control Continuo Con PLCDocumento6 páginasControl Continuo Con PLCCesar Marron MattaAún no hay calificaciones
- Laboratorio 1 Sistemas Automaticos GaboDocumento8 páginasLaboratorio 1 Sistemas Automaticos Gaboobaoba_81Aún no hay calificaciones
- Automatización industrial: conceptos básicosDocumento28 páginasAutomatización industrial: conceptos básicosmil16Aún no hay calificaciones
- Sistemas Modernos de ControlDocumento6 páginasSistemas Modernos de ControlanaAún no hay calificaciones
- MonografiaDocumento13 páginasMonografiaJusto Jose Ramos AnahueAún no hay calificaciones
- Diseno Neumatico y Electronico Del Sistema de ControlDocumento0 páginasDiseno Neumatico y Electronico Del Sistema de ControlVíctor VargasAún no hay calificaciones
- Pautas de ControlDocumento6 páginasPautas de ControlRandy Laos NolazcoAún no hay calificaciones
- Proporcional Integral DerivativoDocumento12 páginasProporcional Integral DerivativoGustavo PizarroAún no hay calificaciones
- Integración de Sistemas AutomaticosDocumento26 páginasIntegración de Sistemas AutomaticosCarlos Salazar MariñoAún no hay calificaciones
- Cuándo elegir controlador PIDDocumento12 páginasCuándo elegir controlador PIDPRODUCCIONES MCAún no hay calificaciones
- Control Electrónico Un Conocimiento Invaluable para El TecnicoDocumento22 páginasControl Electrónico Un Conocimiento Invaluable para El TecnicoWilly TurdoAún no hay calificaciones
- Investigación de Un AutomatismoDocumento12 páginasInvestigación de Un Automatismosacf020117Aún no hay calificaciones
- Tipos de ControlesDocumento5 páginasTipos de ControlesMarco PerezAún no hay calificaciones
- ServosistemasDocumento7 páginasServosistemasEco LinsuAún no hay calificaciones
- Sistemas AutomáticosDocumento12 páginasSistemas AutomáticosMariela Anton ChungaAún no hay calificaciones
- Regulación Automática (Parte 1)Documento10 páginasRegulación Automática (Parte 1)pepeAún no hay calificaciones
- Investigación Unidad 4 InstrumentacionDocumento27 páginasInvestigación Unidad 4 InstrumentacionDanna LopezAún no hay calificaciones
- Controladores ElectronicosDocumento9 páginasControladores ElectronicosKEVIN ALFONSO SOCARRAZ RICOAún no hay calificaciones
- Principios de Automatizacion IndustrialDocumento10 páginasPrincipios de Automatizacion IndustrialKoke Ahumada CastilloAún no hay calificaciones
- FORO Sistema de Bombeo (PLC Siemens S7 1200)Documento5 páginasFORO Sistema de Bombeo (PLC Siemens S7 1200)Wilbert ACAún no hay calificaciones
- Sistema Electrónico Del AutomóvilDocumento9 páginasSistema Electrónico Del Automóvilcesar condoriAún no hay calificaciones
- 7.unidad IV Sistemas AutomáticosDocumento40 páginas7.unidad IV Sistemas AutomáticosAle FarfanAún no hay calificaciones
- Sistemas-control-lazo-cerrado-abiertoDocumento8 páginasSistemas-control-lazo-cerrado-abiertoYamil JuarezAún no hay calificaciones
- Unidad 5 de Instrumentacion KemberlyDocumento24 páginasUnidad 5 de Instrumentacion Kemberlykemberly oviedoAún no hay calificaciones
- SistemasControlDocumento5 páginasSistemasControlGabo ContrerasAún no hay calificaciones
- Control Electrónico Tarjetas AADocumento22 páginasControl Electrónico Tarjetas AAbj bjaAún no hay calificaciones
- Que Diferencia Hay Entre Sistema de Control Manual y AutomatDocumento2 páginasQue Diferencia Hay Entre Sistema de Control Manual y AutomataxelguiovaniloyariveraAún no hay calificaciones
- Ingeniería de control - Introducción a los sistemas de control y modelación matemáticaDocumento11 páginasIngeniería de control - Introducción a los sistemas de control y modelación matemáticaAlex MeloAún no hay calificaciones
- Elementos ControlDocumento18 páginasElementos ControlIng Joshua BetancourtAún no hay calificaciones
- Control PID: Fundamentos y aplicaciones del controlador proporcional integral derivativoDocumento5 páginasControl PID: Fundamentos y aplicaciones del controlador proporcional integral derivativoWilliam JHAún no hay calificaciones
- Modelos líneas espera control asistidoDocumento4 páginasModelos líneas espera control asistidoJOSE JAVIER GARCIA GUEVARAAún no hay calificaciones
- Ecamen de SensoresDocumento9 páginasEcamen de Sensoresirenequepuy05Aún no hay calificaciones
- 01 El PLC PDF Sosa QuintanaDocumento12 páginas01 El PLC PDF Sosa QuintanaPunto ClasesAún no hay calificaciones
- Control Electrónico Aire Acondicionado Mini SplitDocumento14 páginasControl Electrónico Aire Acondicionado Mini SplittalentoAún no hay calificaciones
- Control AnalogicoDocumento6 páginasControl Analogicofray1308Aún no hay calificaciones
- Los Mejores Sistemas de Control Electrónico AutomotrizDocumento44 páginasLos Mejores Sistemas de Control Electrónico AutomotrizDo LcAún no hay calificaciones
- Elementos o Dispositivos Que Forman Un AutomatismoDocumento2 páginasElementos o Dispositivos Que Forman Un AutomatismoArturo Razo RosalesAún no hay calificaciones
- Aporte - Elementos y Tipo de Lazos de ControlDocumento4 páginasAporte - Elementos y Tipo de Lazos de ControlCarlos Alberto Ramírez RestrepoAún no hay calificaciones
- Concepto de Control en Lazo CerradoDocumento7 páginasConcepto de Control en Lazo CerradoJose Humberto RVAún no hay calificaciones
- Control Proporcional+Integral+DerivativoDocumento11 páginasControl Proporcional+Integral+DerivativoOlivia Antonia Gomez RuizAún no hay calificaciones
- SEMANA 5 (SENSORES Y ACTUADORES)Documento34 páginasSEMANA 5 (SENSORES Y ACTUADORES)daxmeza4Aún no hay calificaciones
- Estructura de Un AutomatismoDocumento19 páginasEstructura de Un AutomatismoVicente SolisAún no hay calificaciones
- InstrumentacionDocumento2 páginasInstrumentacionyorkin santana meranAún no hay calificaciones
- Guia Elaboracion Proyectos Electricos J-VasquezDocumento18 páginasGuia Elaboracion Proyectos Electricos J-VasquezVasquiJoAún no hay calificaciones
- H. Hedin, Seducidos Por La Muerte - Inicio - BioeticaWeb, La Mayor Base de Datos de Artículos de BioéticaDocumento3 páginasH. Hedin, Seducidos Por La Muerte - Inicio - BioeticaWeb, La Mayor Base de Datos de Artículos de BioéticaFrancisco Antonio Zuñiga GarciaAún no hay calificaciones
- Estudio TopograficoDocumento10 páginasEstudio Topograficojjhon gilbetr rivas palominoAún no hay calificaciones
- ODI Ayudante de BodegaDocumento3 páginasODI Ayudante de BodegajeanAún no hay calificaciones
- Memorándum 001 - 2023Documento2 páginasMemorándum 001 - 2023Kristel Lucero Alexandra Mendoza RomanAún no hay calificaciones
- Informe I de Tutoria IiiDocumento9 páginasInforme I de Tutoria IiiAlferys Francisco RodriguezAún no hay calificaciones
- Manual de ApoyoDocumento62 páginasManual de ApoyoDarío Osorio CáceresAún no hay calificaciones
- Tecnologia e InformaticaDocumento6 páginasTecnologia e InformaticaRafael rios perezAún no hay calificaciones
- Trabajo Aplicativo Individual para ImprimirDocumento2 páginasTrabajo Aplicativo Individual para ImprimirVictor IlarioAún no hay calificaciones
- Secuencia DidacticaDocumento2 páginasSecuencia DidacticaStefani CerrudoAún no hay calificaciones
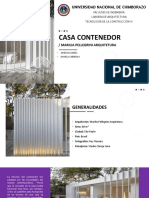
- Análisis Teórico y Grafico de ReferenteDocumento22 páginasAnálisis Teórico y Grafico de ReferenteManchas NyaAún no hay calificaciones
- N°4 Funcionalidad de Los InstrumentosDocumento18 páginasN°4 Funcionalidad de Los InstrumentosLEONEL ANDRES MEDINA MARTINEZAún no hay calificaciones
- CARACTERISTICAS ESENCIALES DEL PROCESO EDUCATIVO NMDocumento4 páginasCARACTERISTICAS ESENCIALES DEL PROCESO EDUCATIVO NMSulamita Esmeralda Vasquez Champet100% (1)
- Ciencia MiercolesDocumento3 páginasCiencia MiercolesDasdas Das FghfghAún no hay calificaciones
- Dimerizacion y BenzoDocumento7 páginasDimerizacion y BenzoJiménez AlexanderAún no hay calificaciones
- Probabilidades e inferencia estadísticaDocumento19 páginasProbabilidades e inferencia estadísticaGerson Hernan Pizarro VelardeAún no hay calificaciones
- Tarot Libro Thoth A CrowleyDocumento286 páginasTarot Libro Thoth A CrowleypumpkinnanaAún no hay calificaciones
- TERCERO SEMANA 3 EVALUACIÓN Grado TerceroDocumento5 páginasTERCERO SEMANA 3 EVALUACIÓN Grado TerceroDavid PorrasAún no hay calificaciones
- Astigmatismo: causas, síntomas y tratamientosDocumento5 páginasAstigmatismo: causas, síntomas y tratamientosAB LBAún no hay calificaciones
- Sociología de las organizacionesDocumento11 páginasSociología de las organizacionesHector aguiAún no hay calificaciones
- Pintura de VehiculosDocumento28 páginasPintura de VehiculosMoises GarciaAún no hay calificaciones
- CertificadoAlturaClinicaDocumento2 páginasCertificadoAlturaClinicaluzagredasAún no hay calificaciones
- Aprendizaje y Memoria InfografíaDocumento1 páginaAprendizaje y Memoria InfografíaKarla PinoAún no hay calificaciones
- Asistente de GerenciaDocumento6 páginasAsistente de GerenciaDamaris CruzAún no hay calificaciones
- Doc2 InsectosDocumento1 páginaDoc2 InsectosWendy TorresAún no hay calificaciones
- VestimentaDocumento4 páginasVestimentaMarc ZenAún no hay calificaciones
- Informe Barrio Bajo de MatucanaDocumento12 páginasInforme Barrio Bajo de MatucanaManuel AguirreAún no hay calificaciones