También podría gustarte
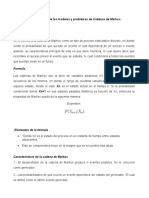
- Características de Los Modelos y Problemas de Cadenas de MarkovDocumento6 páginasCaracterísticas de Los Modelos y Problemas de Cadenas de MarkovFernandoAún no hay calificaciones
- NCh0684-78 COORDINACION MODULAR DE LA CONST..Documento11 páginasNCh0684-78 COORDINACION MODULAR DE LA CONST..Kareen BriceñoAún no hay calificaciones
- Solucion Numeros ComplejosDocumento37 páginasSolucion Numeros ComplejosTato Mayo100% (1)
- Coordenadas PolaresDocumento16 páginasCoordenadas PolaresYolet Carolina Contreras GomezAún no hay calificaciones
- Integración Por PartesDocumento19 páginasIntegración Por Partesjhon efrainAún no hay calificaciones
- Clase2 GeometriaEspacio Video2Documento86 páginasClase2 GeometriaEspacio Video2bet.bilianskyAún no hay calificaciones
- ProyectivoDocumento17 páginasProyectivoluisAún no hay calificaciones
- Espacio AfinDocumento20 páginasEspacio AfinPolanskyAún no hay calificaciones
- Aligeoi t11 1Documento30 páginasAligeoi t11 1Miguel LópezAún no hay calificaciones
- Tema Espacio Afín PDFDocumento6 páginasTema Espacio Afín PDFAntonioAún no hay calificaciones
- Geom 1AM1 Lect3Documento7 páginasGeom 1AM1 Lect3Ruben MartinezAún no hay calificaciones
- Transformaciones Rigidas. UNRDocumento21 páginasTransformaciones Rigidas. UNRRubén TelloAún no hay calificaciones
- Mate 2 TallerDocumento4 páginasMate 2 TallerJosé Miguel Calderón ÑañezAún no hay calificaciones
- Tema5 Beamernuevo-Boadilla 21 22Documento30 páginasTema5 Beamernuevo-Boadilla 21 22Laura Guerrero OrtaAún no hay calificaciones
- Que Es La Que Me Ha Estado Ayudando Con Mi Vida A Mi FamiliaDocumento18 páginasQue Es La Que Me Ha Estado Ayudando Con Mi Vida A Mi FamiliaRony Yair Salcedo MamaniAún no hay calificaciones
- Capitulo 2 - Vectores Coordenados o AlgebraicosDocumento22 páginasCapitulo 2 - Vectores Coordenados o AlgebraicosLucho Kike Corpa100% (1)
- Sub Reticula DosDocumento20 páginasSub Reticula DosDanielKrugAún no hay calificaciones
- C2 - Parte 2 - PlanoDocumento9 páginasC2 - Parte 2 - PlanoMilton Alejandro CuencaAún no hay calificaciones
- Ejercicios PolaresDocumento13 páginasEjercicios PolaresHarrison Antonio Mira NiloAún no hay calificaciones
- Practica 4Documento19 páginasPractica 4Lara FeitoAún no hay calificaciones
- Problemas Métricos Del Espacio EuclídeoDocumento3 páginasProblemas Métricos Del Espacio Euclídeoramiro rincon suarezAún no hay calificaciones
- Polares Cal 2Documento22 páginasPolares Cal 2Shigeru GonzalesAún no hay calificaciones
- Apuntes Espacio Afín 1Documento5 páginasApuntes Espacio Afín 1franAún no hay calificaciones
- Ejercicios PDFDocumento1 páginaEjercicios PDFAntonioAún no hay calificaciones
- Coordenadas PolaresDocumento19 páginasCoordenadas PolaresMaria de los ÁngelesAún no hay calificaciones
- Clase 6Documento32 páginasClase 6CARLOS ANGELES GRANDEZAún no hay calificaciones
- Tema #9 - Matemática Ii - Semana 9 - Coordenadas PolaresDocumento13 páginasTema #9 - Matemática Ii - Semana 9 - Coordenadas PolaresCarlos Ortiz CondoriAún no hay calificaciones
- Tema6 EspaciosAfinesDocumento28 páginasTema6 EspaciosAfinessonowoy921Aún no hay calificaciones
- MN2 NewtonExtensionesConvergenciaDocumento14 páginasMN2 NewtonExtensionesConvergenciaSaAún no hay calificaciones
- Unidad 2 - 2021Documento16 páginasUnidad 2 - 2021Materia GrisAún no hay calificaciones
- Practica 5Documento9 páginasPractica 5Lara FeitoAún no hay calificaciones
- Material 3Documento17 páginasMaterial 3Alan ArevaloAún no hay calificaciones
- S2-Gaa-Sistemas de Coordenadas PolaresDocumento66 páginasS2-Gaa-Sistemas de Coordenadas PolaresJuber CalderonAún no hay calificaciones
- G3Documento5 páginasG3lopasa12Aún no hay calificaciones
- 1 Introduccion A Coordenadas PolaresDocumento13 páginas1 Introduccion A Coordenadas Polaresedesmit0% (1)
- Clase 17 - Coordenadas PolaresDocumento21 páginasClase 17 - Coordenadas PolaresRandall MarinAún no hay calificaciones
- Clase 5Documento31 páginasClase 5CARLOS ANGELES GRANDEZAún no hay calificaciones
- Ejercicio ParametrizaciónDocumento8 páginasEjercicio ParametrizaciónKathy Rodríguez VillegasAún no hay calificaciones
- Polinomios 2021Documento38 páginasPolinomios 2021Patricio CabreraAún no hay calificaciones
- Ley de HookeDocumento9 páginasLey de HookeEmerson NewtonAún no hay calificaciones
- HomologiasDocumento11 páginasHomologiasDiegoAún no hay calificaciones
- Presentacion 2Documento34 páginasPresentacion 2alan shuguliAún no hay calificaciones
- 3.1 Rectas en El EspacioDocumento14 páginas3.1 Rectas en El Espacio2021 Act HERNANDEZ MOTA LUIS FERNANDOAún no hay calificaciones
- 1.introduccion ConicasDocumento23 páginas1.introduccion ConicasgidiAún no hay calificaciones
- Cap4 Geometria Analitica en El PlanoDocumento7 páginasCap4 Geometria Analitica en El PlanoNoé Taza TantavilcaAún no hay calificaciones
- Semana 6 - Rectas en El EspacioDocumento16 páginasSemana 6 - Rectas en El EspacioRodrigo CMAún no hay calificaciones
- Coordenadas Polares TrabajoDocumento25 páginasCoordenadas Polares TrabajolucaAún no hay calificaciones
- Coordenadas Polares 2Documento70 páginasCoordenadas Polares 2David C. LongobardiAún no hay calificaciones
- Calculo VectorialDocumento69 páginasCalculo VectorialBaphodeathAún no hay calificaciones
- Apuntes GEOMETRIA AFIN PDFDocumento53 páginasApuntes GEOMETRIA AFIN PDFLuis Perez GomezAún no hay calificaciones
- Apuntes GEOMETRIA AFIN PDFDocumento53 páginasApuntes GEOMETRIA AFIN PDFLuis Perez GomezAún no hay calificaciones
- Taller 7 Nociones de Geometría EuclidianaDocumento11 páginasTaller 7 Nociones de Geometría EuclidianaAndres MuñozAún no hay calificaciones
- Calculo Integral-PolaresDocumento14 páginasCalculo Integral-PolaresAldo Mendoza100% (1)
- ParametrizacionDocumento57 páginasParametrizacionAlberto LQAún no hay calificaciones
- Capitulo 02 PDFDocumento16 páginasCapitulo 02 PDFcircuitosintegradosAún no hay calificaciones
- Capitulo 02 PDFDocumento16 páginasCapitulo 02 PDFcircuitosintegradosAún no hay calificaciones
- Guía #1-Geometría-Sistemas CoordenadosDocumento18 páginasGuía #1-Geometría-Sistemas CoordenadosGabriela Florez LenguaAún no hay calificaciones
- Unidad 4Documento15 páginasUnidad 4Materia GrisAún no hay calificaciones
- Recta en El PlanoDocumento20 páginasRecta en El PlanoFranco GrossAún no hay calificaciones
- Coordenadas PolaresDocumento19 páginasCoordenadas PolaresLuis Arturo Jara BardalesAún no hay calificaciones
- Hoja6 ALG 23 24Documento2 páginasHoja6 ALG 23 24ingenauta7282Aún no hay calificaciones
- C2 Parte 3Documento8 páginasC2 Parte 3Milton Alejandro CuencaAún no hay calificaciones
- Semana 8 Sistema de Coordenadas Polares PDFDocumento19 páginasSemana 8 Sistema de Coordenadas Polares PDFWalter Valdivieso uchofenAún no hay calificaciones
- Tema 5 AlgebraDocumento65 páginasTema 5 AlgebraJose Francisco Rubio DiazAún no hay calificaciones
- Estructuras Algebraicas MatemáticasDocumento133 páginasEstructuras Algebraicas MatemáticasJose Francisco Rubio DiazAún no hay calificaciones
- Tema 2 AlgebraDocumento59 páginasTema 2 AlgebraJose Francisco Rubio DiazAún no hay calificaciones
- Tema 7 AlgebraDocumento26 páginasTema 7 AlgebraJose Francisco Rubio DiazAún no hay calificaciones
- Tema 4 - Espacios Vectoriales de Dimensión FinitaDocumento10 páginasTema 4 - Espacios Vectoriales de Dimensión FinitaJose Francisco Rubio DiazAún no hay calificaciones
- Tema 1 - Comenzando A TrabajarDocumento17 páginasTema 1 - Comenzando A TrabajarCarlos Antony Cruz PeñaAún no hay calificaciones
- Matd Combinatoria Recurrencias 4760Documento65 páginasMatd Combinatoria Recurrencias 4760Daniel SánchezAún no hay calificaciones
- Tema 3 - Sistemas de Ecuaciones LinealesDocumento8 páginasTema 3 - Sistemas de Ecuaciones LinealesJose Francisco Rubio DiazAún no hay calificaciones
- El Lema de Intercambio de Steinitz - El Blog de LeoDocumento8 páginasEl Lema de Intercambio de Steinitz - El Blog de LeoJose Francisco Rubio DiazAún no hay calificaciones
- Problemas de Dualidad y Bases Duales - El Blog de LeoDocumento11 páginasProblemas de Dualidad y Bases Duales - El Blog de LeoJose Francisco Rubio DiazAún no hay calificaciones
- Entrega Mathematica Formas Bilineales y Cuadráticas-1Documento1 páginaEntrega Mathematica Formas Bilineales y Cuadráticas-1Jose Francisco Rubio DiazAún no hay calificaciones
- Discriminante de Ecuaciones CuadráticasDocumento7 páginasDiscriminante de Ecuaciones CuadráticasDeysi SeminarioAún no hay calificaciones
- Ejercicios ModuloDocumento12 páginasEjercicios ModuloWilliam PabónAún no hay calificaciones
- Desigualdades Ervin FigueroaDocumento5 páginasDesigualdades Ervin FigueroaErvin FigueroaAún no hay calificaciones
- ACM Tema 04A EcuacionesDocumento10 páginasACM Tema 04A EcuacionesPedro Lomas NielfaAún no hay calificaciones
- Aplicaciones de Las Ecuaciones DiferencialesDocumento8 páginasAplicaciones de Las Ecuaciones DiferencialesWil_SopAún no hay calificaciones
- Método de EulerDocumento1 páginaMétodo de EulerAldo Tapia100% (2)
- 6 MB Ing 2015 I Matrices y DeterminantesDocumento35 páginas6 MB Ing 2015 I Matrices y DeterminantesGian carlo CespedesAún no hay calificaciones
- Superficie de RiemannDocumento3 páginasSuperficie de RiemannJavier Garcia RajoyAún no hay calificaciones
- Notas Unidad 4Documento11 páginasNotas Unidad 4un lectorAún no hay calificaciones
- Taller Practico FuncionesDocumento4 páginasTaller Practico Funcioneselder manuel arroyo perez80% (5)
- Tarea I Parcial MM412 II-2017Documento2 páginasTarea I Parcial MM412 II-2017Andrea RiveraAún no hay calificaciones
- Eb 0014 MatematicaDocumento9 páginasEb 0014 Matematicachinchay95Aún no hay calificaciones
- Caso 2 - Grupo 5Documento85 páginasCaso 2 - Grupo 5Leonardo CabezudoAún no hay calificaciones
- NTU3MATE1NEWT1B2IMEDocumento22 páginasNTU3MATE1NEWT1B2IMEJessica TreviñoAún no hay calificaciones
- Calculo Integral Calculo Integral PDFDocumento203 páginasCalculo Integral Calculo Integral PDFJolian Jozep BustosAún no hay calificaciones
- Grafica en Papel MkilimetradoDocumento17 páginasGrafica en Papel MkilimetradoYury Rojas Carbajal0% (1)
- Unidad 2 P1Documento34 páginasUnidad 2 P1Sebastian MartinezAún no hay calificaciones
- Cartillas 1 A 5-MarkovDocumento44 páginasCartillas 1 A 5-MarkovG OchoAún no hay calificaciones
- Trabajo de Metodos Numericos IDocumento8 páginasTrabajo de Metodos Numericos IEricEspinozaAcostaAún no hay calificaciones
- 01 Clase - Introduccion A Las Ecuaciones DiferencialesDocumento29 páginas01 Clase - Introduccion A Las Ecuaciones DiferencialesPablo HernandezAún no hay calificaciones
- Desarrollo Guia 3 Matematicass - 11B - DiegoDocumento9 páginasDesarrollo Guia 3 Matematicass - 11B - Diegoviviana Rodriguez100% (3)
- Armaduras en 3 DDocumento165 páginasArmaduras en 3 DCelis Avellaneda Jhunior100% (1)
- Cuadro ComparativoDocumento4 páginasCuadro ComparativoyiselAún no hay calificaciones
- Ec. Do Por Series de Potencias PDFDocumento15 páginasEc. Do Por Series de Potencias PDFErika Itzel C AAún no hay calificaciones
- Actividad No 6 AlgebraDocumento8 páginasActividad No 6 AlgebraSergio Camilo Rojas GonzalezAún no hay calificaciones
- Conjuntos NuméricosDocumento23 páginasConjuntos NuméricosCamila Blanco0% (2)