También podría gustarte
- 19-SEL-Temas Consulta VOR-DMEDocumento18 páginas19-SEL-Temas Consulta VOR-DMEDAVID MANOLO GARZON ROMEROAún no hay calificaciones
- Laboratorio de Telecomunicaciones - Proyecto Radar de AvionesDocumento18 páginasLaboratorio de Telecomunicaciones - Proyecto Radar de AvionesjisharAún no hay calificaciones
- Info Tecnica Globo AmsatDocumento13 páginasInfo Tecnica Globo Amsatmuni1Aún no hay calificaciones
- 24 Fly AwayDocumento4 páginas24 Fly AwayGueryDeLaBarraCervantesAún no hay calificaciones
- Conferencia Drones - Mayo 2020Documento61 páginasConferencia Drones - Mayo 2020egdejuanaAún no hay calificaciones
- Evaluación Final de FotogrametríaDocumento5 páginasEvaluación Final de FotogrametríaHasegawa KodakaAún no hay calificaciones
- Analisis de Un Receptor ADS-B Con GNU Radio v3.Documento5 páginasAnalisis de Un Receptor ADS-B Con GNU Radio v3.Elvis Gutierrez GonzalesAún no hay calificaciones
- Segundo ParcialDocumento5 páginasSegundo ParcialjrpalacioAún no hay calificaciones
- Ata 23Documento43 páginasAta 23Liidy Geral PerezgAún no hay calificaciones
- Telecomunicaciones AeronáuticasDocumento22 páginasTelecomunicaciones AeronáuticasEliab Avila PaniaguaAún no hay calificaciones
- EXPOATA23Documento2 páginasEXPOATA23Julian ZuñigaAún no hay calificaciones
- AvionicsDocumento20 páginasAvionicsPEdro RUiz100% (2)
- Que Es Ads B Sesar y NextgenDocumento4 páginasQue Es Ads B Sesar y NextgenSalvador Calderón ArancibiaAún no hay calificaciones
- Telemetria SatelitalDocumento7 páginasTelemetria SatelitalCesar CFAún no hay calificaciones
- MultilateracionDocumento29 páginasMultilateracionmartins79120479Aún no hay calificaciones
- AtlasppX GeneralidadesDocumento5 páginasAtlasppX GeneralidadesGabriel MesaAún no hay calificaciones
- Batimetria Digital RTKDocumento6 páginasBatimetria Digital RTKClaudio Andres Bernal MonsalveAún no hay calificaciones
- Plataformas y SensoresDocumento61 páginasPlataformas y SensoresCresencio TurpoAún no hay calificaciones
- Anexo 02-Sistema de Recepción Radio (VHF) V.2Documento22 páginasAnexo 02-Sistema de Recepción Radio (VHF) V.2Fabiàn CaballeroAún no hay calificaciones
- Deneufville VII ResumenDocumento5 páginasDeneufville VII ResumenAlbert Diago (igorres43)Aún no hay calificaciones
- Técnica RTK: National University of Trujillo Civil EngineeringDocumento15 páginasTécnica RTK: National University of Trujillo Civil EngineeringAlejandra Katherine Sanchez MezaAún no hay calificaciones
- Navegacion Seccion DDocumento10 páginasNavegacion Seccion D446pfh7tvdAún no hay calificaciones
- Formato Protocolo ADSB PDFDocumento108 páginasFormato Protocolo ADSB PDFSidnei DolciAún no hay calificaciones
- P1 GNS3 AtmDocumento8 páginasP1 GNS3 AtmAndreina BarcoAún no hay calificaciones
- Anexo 10. Comunicaciónes Aeronáuticas1Documento39 páginasAnexo 10. Comunicaciónes Aeronáuticas1Jesse Allan Cano Garnica100% (1)
- Aeronaves p2Documento10 páginasAeronaves p2A.RamosAún no hay calificaciones
- Bolivia Ads B (Sca)Documento11 páginasBolivia Ads B (Sca)Salvador Calderón ArancibiaAún no hay calificaciones
- Conocimineto General Del Uas Parte 2Documento38 páginasConocimineto General Del Uas Parte 2Juan Carlos Gonzalez SanabriaAún no hay calificaciones
- Diseño de TransponderDocumento4 páginasDiseño de TransponderEduardo SalinasAún no hay calificaciones
- 3 - GPS DiferencialDocumento7 páginas3 - GPS Diferencialcutar45Aún no hay calificaciones
- Equipos Del PuenteDocumento30 páginasEquipos Del PuenteNippur de LagashAún no hay calificaciones
- RTK Config Estacion GPSDocumento2 páginasRTK Config Estacion GPSpepemurciaAún no hay calificaciones
- Variables A Considerar para La Implementación de Una Antena BtsDocumento12 páginasVariables A Considerar para La Implementación de Una Antena BtsUlises Huamani HuarachaAún no hay calificaciones
- Trabajo VORDocumento6 páginasTrabajo VORJulian Eduardo Rodriguez RamirezAún no hay calificaciones
- Antenas Inteligentes de Haz ConmutadoDocumento13 páginasAntenas Inteligentes de Haz ConmutadoDanielaToaquizaAún no hay calificaciones
- Inmarsat AeroDocumento20 páginasInmarsat AeroDonna MayverickAún no hay calificaciones
- Informe 1. Transmisor - Estacion TerrenaDocumento5 páginasInforme 1. Transmisor - Estacion TerrenaJosé LanzaAún no hay calificaciones
- 2.2 Partes de Un Dron y Mantenimiento.Documento17 páginas2.2 Partes de Un Dron y Mantenimiento.Camilo CamoneAún no hay calificaciones
- Levantamiento GPS ConDocumento15 páginasLevantamiento GPS ConAlejandra Katherine Sanchez MezaAún no hay calificaciones
- Propuesta Técnico Económica Anabel PerezDocumento7 páginasPropuesta Técnico Económica Anabel PerezEdgar Fiallos OrtegaAún no hay calificaciones
- Especificaciones Tecnicas Sistema VsatDocumento13 páginasEspecificaciones Tecnicas Sistema VsatElvis Zi Alaban DiazAún no hay calificaciones
- Proyect #1 RadarDocumento15 páginasProyect #1 RadarCarlos CubillaAún no hay calificaciones
- Teoría GPS0Documento45 páginasTeoría GPS0Juan Manuel Rodriguez ArbelaezAún no hay calificaciones
- AVIONICADocumento8 páginasAVIONICAFelipe TamayoAún no hay calificaciones
- TP Obligatorio Clase 3Documento3 páginasTP Obligatorio Clase 3Angel G. GomezAún no hay calificaciones
- Ata 23 A320Documento40 páginasAta 23 A320JuanJoseHomezMoncaleanoAún no hay calificaciones
- Aeropuertos SeñalizaciónDocumento7 páginasAeropuertos Señalizaciónsergio garciaAún no hay calificaciones
- Tema 2-4Documento7 páginasTema 2-4jose miguel barceloAún no hay calificaciones
- Dvb-0063-10 - Alta RCST - Versión Instalador Hub Europa1Documento12 páginasDvb-0063-10 - Alta RCST - Versión Instalador Hub Europa1Neo FioAún no hay calificaciones
- Artículo Sistema Satelital NOOADocumento12 páginasArtículo Sistema Satelital NOOACésar Augusto Guilcamaigua GuamushigAún no hay calificaciones
- Sistemas de Comunicaciones AbordoDocumento11 páginasSistemas de Comunicaciones AbordoAndres Miguel EscalonaAún no hay calificaciones
- Marco Teorico - 2.1.2 - Sistemas de Navegacion SatelitalDocumento35 páginasMarco Teorico - 2.1.2 - Sistemas de Navegacion SatelitalCelia Nina FernandezAún no hay calificaciones
- AAEIA - Ejercicios Prácticos 2022Documento10 páginasAAEIA - Ejercicios Prácticos 2022Carlos Pablo FusaroAún no hay calificaciones
- Ett Dron Ultimo - OriginalDocumento10 páginasEtt Dron Ultimo - OriginalGERMUTH ALVITES ASCUEAún no hay calificaciones
- Antenas verticales para bajas frecuencias: (MF y HF)De EverandAntenas verticales para bajas frecuencias: (MF y HF)Aún no hay calificaciones
- Prácticas de redes de datos e industrialesDe EverandPrácticas de redes de datos e industrialesCalificación: 4 de 5 estrellas4/5 (5)
- Operaciones y mantenimiento en compañías aéreasDe EverandOperaciones y mantenimiento en compañías aéreasAún no hay calificaciones
- UF1874 - Mantenimiento de la infraestructura de la red de comunicacionesDe EverandUF1874 - Mantenimiento de la infraestructura de la red de comunicacionesAún no hay calificaciones
- Transformador De Estado Sólido: Revolucionando la red eléctrica para la calidad de la energía y la eficiencia energéticaDe EverandTransformador De Estado Sólido: Revolucionando la red eléctrica para la calidad de la energía y la eficiencia energéticaAún no hay calificaciones
- Pa 800 060921 EsDocumento4 páginasPa 800 060921 EsJesus Caño vargasAún no hay calificaciones
- Manual de Usuario Gestión de CuentasDocumento9 páginasManual de Usuario Gestión de CuentasjoanAún no hay calificaciones
- RV Instructivo Instalación Alarmas PSTDocumento36 páginasRV Instructivo Instalación Alarmas PSTRodrigo Piuselli100% (1)
- Diagnóstico No. 1 - Hardware y SoftwareDocumento4 páginasDiagnóstico No. 1 - Hardware y Softwaremara ramirezAún no hay calificaciones
- Estudios y Perspectivas en Turismo - 30° Aniversario Volumen 29 (2020) pp.792 - 816Documento25 páginasEstudios y Perspectivas en Turismo - 30° Aniversario Volumen 29 (2020) pp.792 - 816Karen AnalíAún no hay calificaciones
- Brearkermati CTP711Documento2 páginasBrearkermati CTP711jhon padron100% (1)
- Curso 2019 Innovacion y Tecnologia UnidDocumento52 páginasCurso 2019 Innovacion y Tecnologia UnidcocelisAún no hay calificaciones
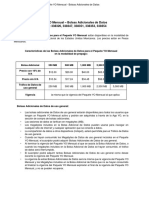
- 615ca17853a0b7846cc26cf2 - Paquete YO Mensual - Bolsas Adicionales de DatosDocumento3 páginas615ca17853a0b7846cc26cf2 - Paquete YO Mensual - Bolsas Adicionales de DatosServicio SocialAún no hay calificaciones
- Entrega Final Proyecto de TópicosDocumento69 páginasEntrega Final Proyecto de TópicosEDUARDO YAHIR ACEVEDO ANAYAAún no hay calificaciones
- 2021 06 06 23 43 39 8425447 G32 Jorge Arnaldo Tacachira SegalesDocumento8 páginas2021 06 06 23 43 39 8425447 G32 Jorge Arnaldo Tacachira Segales12345Aún no hay calificaciones
- Estructura de Un Pagina WebDocumento9 páginasEstructura de Un Pagina WebManrique GutiérrezAún no hay calificaciones
- Examen de Certificación - Google ActívateDocumento13 páginasExamen de Certificación - Google ActívateMartin J P SanchezAún no hay calificaciones
- Curso: Calidad de Servicio de Tecnologías de InformaciónDocumento42 páginasCurso: Calidad de Servicio de Tecnologías de InformaciónElmer CeladitaAún no hay calificaciones
- Resolviendo Ecuaciones Cuadráticas Completando El CuadradoDocumento9 páginasResolviendo Ecuaciones Cuadráticas Completando El CuadradoJuan PaezAún no hay calificaciones
- Capítulo 5 - Exposicion CISCODocumento17 páginasCapítulo 5 - Exposicion CISCODARYL ARATH OSCCO BUSTAMANTEAún no hay calificaciones
- Requisitos Funcionales y No FuncionalesDocumento10 páginasRequisitos Funcionales y No FuncionalesAlfredo Enrique Castillo LaraAún no hay calificaciones
- Reducción Por Filas y Formas Escalonadas - Eliminación de Gauss y Eliminación de Gauss-JordanDocumento8 páginasReducción Por Filas y Formas Escalonadas - Eliminación de Gauss y Eliminación de Gauss-JordanAdrianaAún no hay calificaciones
- Guia 2Documento14 páginasGuia 2sthefanny gamezAún no hay calificaciones
- IB - 01 - D Plan de Ejecucion BIM para Fase de Preconstruccion v2Documento29 páginasIB - 01 - D Plan de Ejecucion BIM para Fase de Preconstruccion v2CHRISTIAN SANCHEZ100% (1)
- ¿Por Qué Hay Tantos Trancones en Bogotá - BogotáDocumento5 páginas¿Por Qué Hay Tantos Trancones en Bogotá - BogotáAndrés OrtegaAún no hay calificaciones
- Análisis en La Aplicación de Estándares en Un Conjunto de RedDocumento9 páginasAnálisis en La Aplicación de Estándares en Un Conjunto de Redluis adrianAún no hay calificaciones
- Ciudadania DigitalDocumento6 páginasCiudadania DigitalValentina Sarmiento RamosAún no hay calificaciones
- Cot. 96668 Aguas de Yaracuy CADocumento1 páginaCot. 96668 Aguas de Yaracuy CADEPARTAMENTO DE CALIDAD DE AGUAAún no hay calificaciones
- Clase 13 - FILTROS DE ENFOQUE Y DESENFOQUEDocumento2 páginasClase 13 - FILTROS DE ENFOQUE Y DESENFOQUEAdrian VenturoAún no hay calificaciones
- PL. Arquitectura de Von NeumannDocumento4 páginasPL. Arquitectura de Von NeumannDavid MontoroAún no hay calificaciones
- Guia Aproximacion Telepsicologia CopcylDocumento15 páginasGuia Aproximacion Telepsicologia CopcylFredyAlexanderRomero-GuzmanAún no hay calificaciones
- Comandos Internos y Externos Del MSDocumento2 páginasComandos Internos y Externos Del MSGibranMtzAún no hay calificaciones
- PRESENTACION DE REDES 12°C Tecnología - REDES WLANDocumento9 páginasPRESENTACION DE REDES 12°C Tecnología - REDES WLANIFER PLUGAún no hay calificaciones
- The Most Complete Starter Kit For UNO V1.0.18.12.24-EspañolDocumento223 páginasThe Most Complete Starter Kit For UNO V1.0.18.12.24-Españolkamogawastor100% (1)
- Práctica 7 - Parte 1. InstruccionesDocumento4 páginasPráctica 7 - Parte 1. Instruccionespaulo diezAún no hay calificaciones