También podría gustarte
- Laboratorio Profibus Variador AjjsDocumento11 páginasLaboratorio Profibus Variador AjjsJavier RiverosAún no hay calificaciones
- Variador DanfossDocumento9 páginasVariador DanfossEmilio Bonnet100% (1)
- GUIA PLC DELTA AVANZADODocumento19 páginasGUIA PLC DELTA AVANZADOgerardoarevalo76Aún no hay calificaciones
- Control de motor de inducción trifásico con PLCDocumento7 páginasControl de motor de inducción trifásico con PLCMiguel Perez FloresAún no hay calificaciones
- Taller #6 Implementacion de Variador de VelocidadDocumento23 páginasTaller #6 Implementacion de Variador de Velocidadeiner menor altamiranoAún no hay calificaciones
- Control variador frecuencia OmronDocumento38 páginasControl variador frecuencia OmronjorgeAún no hay calificaciones
- Practica 7Documento11 páginasPractica 7Isaac Tonatiuh Ayala PérezAún no hay calificaciones
- Práctica 9 - Variadores de VelocidadDocumento8 páginasPráctica 9 - Variadores de VelocidadAnonymous fdPbxTWIAún no hay calificaciones
- Variador de FrecuenciaDocumento11 páginasVariador de FrecuenciaJose David Camacho LaimeAún no hay calificaciones
- 2 Guia-Simoreg 6RA70 1Documento22 páginas2 Guia-Simoreg 6RA70 1juan pabloAún no hay calificaciones
- Practica Variador de FrecuenciaDocumento14 páginasPractica Variador de FrecuenciaRobotav IngenieriaAún no hay calificaciones
- Control Motor TecladoDocumento14 páginasControl Motor TecladoAdolfo Rojas ArellanoAún no hay calificaciones
- R4 Lcei Salgado JocelyneDocumento9 páginasR4 Lcei Salgado JocelyneHomeroOjedaAún no hay calificaciones
- Variador de velocidad: configuración y pruebaDocumento6 páginasVariador de velocidad: configuración y pruebazafra25Aún no hay calificaciones
- Laboratorio 5Documento26 páginasLaboratorio 5Louie Derek OrtizAún no hay calificaciones
- Prácticas Con El MS150Documento11 páginasPrácticas Con El MS150parfreeAún no hay calificaciones
- Cida-Pract10 - Introducción Al Variador de VelocidadDocumento5 páginasCida-Pract10 - Introducción Al Variador de VelocidadcrinayaAún no hay calificaciones
- PREINFORME No 7.0 Control de Giro y Velocidad1Documento3 páginasPREINFORME No 7.0 Control de Giro y Velocidad1Jair JoyaAún no hay calificaciones
- Vareador de FrecuenciaDocumento4 páginasVareador de FrecuenciaDiego XavierrAún no hay calificaciones
- Laboratorio 7 - Variadores de VelocidadDocumento4 páginasLaboratorio 7 - Variadores de VelocidadSegundo Garcia ValerioAún no hay calificaciones
- p11 - Control de Marcha, Paro y Reversible A Través de 3 Pulsadores. Variar La Frecuencia A Través de Un Potenciómetro, Por Medio Del Variador de Frecuencia Altivar 312Documento8 páginasp11 - Control de Marcha, Paro y Reversible A Través de 3 Pulsadores. Variar La Frecuencia A Través de Un Potenciómetro, Por Medio Del Variador de Frecuencia Altivar 312LoraAún no hay calificaciones
- 3 - Simoreg 6RA70PC BicoDocumento26 páginas3 - Simoreg 6RA70PC BicojairoAún no hay calificaciones
- Variadores de FrecuenciaDocumento9 páginasVariadores de FrecuenciaDavid PovedaAún no hay calificaciones
- Configuración de un variador Yaskawa-V1000 para controlar la velocidad e invertir el giro de un motor asíncronoDocumento5 páginasConfiguración de un variador Yaskawa-V1000 para controlar la velocidad e invertir el giro de un motor asíncronocristianAún no hay calificaciones
- Practica 11Documento6 páginasPractica 11Willy SebastianAún no hay calificaciones
- Lab 6 PLCDocumento12 páginasLab 6 PLCJose Antonio Bellido VargasAún no hay calificaciones
- Instalación, Arranque e Inversión de Marcha Del Motor Asíncrono Trifásico Con ContactoresDocumento12 páginasInstalación, Arranque e Inversión de Marcha Del Motor Asíncrono Trifásico Con ContactoresRenzoAún no hay calificaciones
- Laboratorio Nº1automata PLCDocumento15 páginasLaboratorio Nº1automata PLCMaximo RagnarAún no hay calificaciones
- Practica Salidas AnalogicasDocumento11 páginasPractica Salidas AnalogicasMarco AntonioAún no hay calificaciones
- Práctica 11Documento6 páginasPráctica 11Karencita VanessaAún no hay calificaciones
- T16 - Ci - PalloDocumento9 páginasT16 - Ci - PalloGaTo LokkoAún no hay calificaciones
- Control escalar MIRBDocumento11 páginasControl escalar MIRBfenixx2008Aún no hay calificaciones
- Lab05y06 Microcontroladores Castillo Garay Gonzales NarcisoDocumento28 páginasLab05y06 Microcontroladores Castillo Garay Gonzales NarcisoIsrael Castillo OlayaAún no hay calificaciones
- LAB 4 - Automatización-C4-5ADocumento13 páginasLAB 4 - Automatización-C4-5AYordi Alvitres0% (1)
- Variador de FrecuenciaDocumento5 páginasVariador de FrecuenciaTarik BenamarAún no hay calificaciones
- MM420/440 INSTRUCCIONESDocumento60 páginasMM420/440 INSTRUCCIONESRicardo Vazquez SalinasAún no hay calificaciones
- Variador de VelocidadDocumento13 páginasVariador de VelocidadJionni Dlzma100% (1)
- Proyecto PDFDocumento22 páginasProyecto PDFKelvin Pantaleon RiofrioAún no hay calificaciones
- L8 - Motor Sincrono Trifasico (NEW) JCDocumento20 páginasL8 - Motor Sincrono Trifasico (NEW) JCbertha100% (1)
- Topicos Practica 1Documento12 páginasTopicos Practica 1Luis Alexis Silva FloresAún no hay calificaciones
- Lab 1Documento2 páginasLab 1Pedro Cardenas03Aún no hay calificaciones
- Práctica Con ServomotorDocumento11 páginasPráctica Con Servomotorvioleta_jiménez_2Aún no hay calificaciones
- Variedades de FrecuenciaDocumento9 páginasVariedades de FrecuenciaAngie Torres HerreraAún no hay calificaciones
- Motores en SecuenciaDocumento17 páginasMotores en SecuenciaDavid Omar Mateo LopezAún no hay calificaciones
- Modelo de CircuitosDocumento3 páginasModelo de CircuitosfernandojoseAún no hay calificaciones
- GUIA DE AUTOMATIZACIONDocumento8 páginasGUIA DE AUTOMATIZACIONĶèvîñ ĆìThø KrAún no hay calificaciones
- Laboratorio - VDF y PS 2020Documento7 páginasLaboratorio - VDF y PS 2020Eduardo ChavezAún no hay calificaciones
- Laboratorio 6 Maquinas 2Documento10 páginasLaboratorio 6 Maquinas 2Daniel Alonzo Bustíos GuillénAún no hay calificaciones
- Wuolah Free Practica VariadorDocumento16 páginasWuolah Free Practica Variadorjesus castrilloAún no hay calificaciones
- Electrónica de PotenciaDocumento26 páginasElectrónica de Potenciaantony bustamanteAún no hay calificaciones
- Inf06 AmoscolvDocumento18 páginasInf06 AmoscolvSebastian Calle Rey100% (1)
- SERVOMOTORDocumento7 páginasSERVOMOTORRogelio MtzAún no hay calificaciones
- Ajuste Automatico Regulador de Corriente WNTC V3.0Documento4 páginasAjuste Automatico Regulador de Corriente WNTC V3.0Darío Abella ZuazuaAún no hay calificaciones
- Guia Taller N°3 Motor de CC Luis CerecedaDocumento9 páginasGuia Taller N°3 Motor de CC Luis CerecedaMantención FastpackAún no hay calificaciones
- Configuración de variador de velocidad Micromaster 440Documento4 páginasConfiguración de variador de velocidad Micromaster 440Cruz Nar DavidAún no hay calificaciones
- Practica SSW05Documento32 páginasPractica SSW05lghilardi79Aún no hay calificaciones
- Reporte 4 Ruben Yagual PDFDocumento13 páginasReporte 4 Ruben Yagual PDFreysAún no hay calificaciones
- Lab 08 - GohanDocumento14 páginasLab 08 - GohanGerman RazuriAún no hay calificaciones
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 1 de 5 estrellas1/5 (2)
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoDe EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoCalificación: 4 de 5 estrellas4/5 (4)
- Ejercicios Practica 4Documento2 páginasEjercicios Practica 4Luis TapiaAún no hay calificaciones
- Costos TotalesDocumento1 páginaCostos TotalesLuis TapiaAún no hay calificaciones
- Medición, Monitoreo y Simulación de Sistemas EficientesDocumento14 páginasMedición, Monitoreo y Simulación de Sistemas EficientesLuis TapiaAún no hay calificaciones
- Diagrama Panel ModelDocumento1 páginaDiagrama Panel ModelLuis TapiaAún no hay calificaciones
- Mantenimiento eléctrico de equipos de distribución: construcción y clasificación de cables de MTDocumento45 páginasMantenimiento eléctrico de equipos de distribución: construcción y clasificación de cables de MTLuis TapiaAún no hay calificaciones
- ListaInsumosCal12Documento1 páginaListaInsumosCal12Luis TapiaAún no hay calificaciones
- Análisis de calidad de energía eléctrica en vivienda con analizador Fluke 435Documento13 páginasAnálisis de calidad de energía eléctrica en vivienda con analizador Fluke 435Luis TapiaAún no hay calificaciones
- AE TapiaZarateLuisAlberto 1E8 C4 T-FINAL 22-2Documento10 páginasAE TapiaZarateLuisAlberto 1E8 C4 T-FINAL 22-2Luis TapiaAún no hay calificaciones
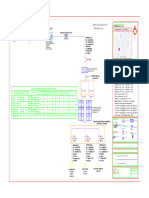
- PROYECTO FOTOV-Model PDFDocumento1 páginaPROYECTO FOTOV-Model PDFLuis TapiaAún no hay calificaciones
- DE C2 TapiaZarateLuisAlberto 1E8 22-2 A4Documento3 páginasDE C2 TapiaZarateLuisAlberto 1E8 22-2 A4Luis TapiaAún no hay calificaciones
- De TapiaZarateLuisAlberto 1E8 22-2 A3Documento18 páginasDe TapiaZarateLuisAlberto 1E8 22-2 A3Luis TapiaAún no hay calificaciones
- Casa Luis 3D (1) - Layout1Documento1 páginaCasa Luis 3D (1) - Layout1Luis TapiaAún no hay calificaciones
- Tarea 3.2,3.4 y 3.5Documento3 páginasTarea 3.2,3.4 y 3.5Luis TapiaAún no hay calificaciones
- AE TapiaZarateLuisAlberto 1E8 ACT.03 22-2Documento11 páginasAE TapiaZarateLuisAlberto 1E8 ACT.03 22-2Luis TapiaAún no hay calificaciones
- TAREA 6.3 y 6.4Documento8 páginasTAREA 6.3 y 6.4Luis TapiaAún no hay calificaciones
- Mant U5Documento34 páginasMant U5Luis TapiaAún no hay calificaciones
- Tarea 4.4, 4.5 y 4.6 - TapiazarateluisDocumento4 páginasTarea 4.4, 4.5 y 4.6 - TapiazarateluisLuis TapiaAún no hay calificaciones
- Practicas Sistemas Programables 4Documento8 páginasPracticas Sistemas Programables 4Luis TapiaAún no hay calificaciones
- TAREA 3.6, 3.7 Y 3.8 - TapiaZarateLuisDocumento3 páginasTAREA 3.6, 3.7 Y 3.8 - TapiaZarateLuisLuis TapiaAún no hay calificaciones
- Mant U3Documento19 páginasMant U3Luis TapiaAún no hay calificaciones
- Tarea 4.1, 4.2 y 4.3 - TapiazarateluisDocumento3 páginasTarea 4.1, 4.2 y 4.3 - TapiazarateluisLuis TapiaAún no hay calificaciones
- PANELES SOLARES-ModelDocumento1 páginaPANELES SOLARES-ModelLuis TapiaAún no hay calificaciones
- Evaluación de riesgos y toma de decisionesDocumento4 páginasEvaluación de riesgos y toma de decisionesLuis TapiaAún no hay calificaciones
- Tarea Once Doce UnoDocumento4 páginasTarea Once Doce UnoLuis TapiaAún no hay calificaciones
- PLANO CONTACTOS-ModeloDocumento1 páginaPLANO CONTACTOS-ModeloLuis TapiaAún no hay calificaciones
- Plan de iluminación tienda calzadoDocumento1 páginaPlan de iluminación tienda calzadoLuis TapiaAún no hay calificaciones
- AGVG-Proyecto FinalDocumento87 páginasAGVG-Proyecto FinalLuis TapiaAún no hay calificaciones
- Parametros ElectricosDocumento5 páginasParametros ElectricosLuis TapiaAún no hay calificaciones
- Unidad 5Documento66 páginasUnidad 5Luis TapiaAún no hay calificaciones
- Prob Newton CastilloDocumento19 páginasProb Newton CastilloLuis TapiaAún no hay calificaciones
- Guía de aprendizaje para automatismos y control de procesosDocumento25 páginasGuía de aprendizaje para automatismos y control de procesosMARCAVILLACA CONDORI ANTONY CLEMENT100% (1)
- Formato Práctica laboratorio-PLC-2012Documento38 páginasFormato Práctica laboratorio-PLC-2012Juan Pablo Galvan CamachoAún no hay calificaciones
- Diseño e Implementación de Un Sistema de Control para Un Horno de CrisolDocumento10 páginasDiseño e Implementación de Un Sistema de Control para Un Horno de CrisolmarcoAún no hay calificaciones
- Repaso de conceptos y ejemplos de programación PLC DL06Documento72 páginasRepaso de conceptos y ejemplos de programación PLC DL06Rodolfo Loza100% (1)
- Manual de robótica industrial: fundamentos, usos y aplicacionesDocumento230 páginasManual de robótica industrial: fundamentos, usos y aplicacionesALPBGREAT73% (11)
- 2016 Apunte General - Operacion y Programacion de Sistemas de Control Con PLCDocumento85 páginas2016 Apunte General - Operacion y Programacion de Sistemas de Control Con PLCAlfredo MamaniAún no hay calificaciones
- Programa Topp 923202 V1Documento26 páginasPrograma Topp 923202 V1Sebastián BelloAún no hay calificaciones
- Manual ConveyorDocumento8 páginasManual Conveyorkhebyn mendiolaAún no hay calificaciones
- Mec Per Lop 2018Documento215 páginasMec Per Lop 2018pruebaAún no hay calificaciones
- Regulador de VelocidadDocumento8 páginasRegulador de VelocidadJesus Aguilar RamirezAún no hay calificaciones
- Syllabus Electrotec PLC Siemens PDFDocumento1 páginaSyllabus Electrotec PLC Siemens PDFWalther CJAún no hay calificaciones
- Documento Tesis GrafcetDocumento69 páginasDocumento Tesis Grafcetdavinci.hoyosAún no hay calificaciones
- Introducción a los PLCDocumento23 páginasIntroducción a los PLCJorge Navarro DíazAún no hay calificaciones
- P1PLCDocumento10 páginasP1PLCMilton Eduardo Rodriguez Serrano100% (2)
- Apm Modulo Plc-Scada Parte I PLC V2016-IDocumento30 páginasApm Modulo Plc-Scada Parte I PLC V2016-IJuan David Baquero ZamudioAún no hay calificaciones
- SN 120200 Manual - 01 Spanish - SDocumento506 páginasSN 120200 Manual - 01 Spanish - SEmmanuel OvandoAún no hay calificaciones
- FX Espanol PDFDocumento105 páginasFX Espanol PDFrodolfo muñoz magañaAún no hay calificaciones
- Norma ISA S5.1 y P&IDDocumento69 páginasNorma ISA S5.1 y P&IDGiovani Alexis Saez VegaAún no hay calificaciones
- Automatización prensa troqueladoDocumento115 páginasAutomatización prensa troqueladoAle KeyAún no hay calificaciones
- Informe TecnicoDocumento7 páginasInforme TecnicoRamiro C. ÁlvarezAún no hay calificaciones
- Semáforos con PLC y TIA PortalDocumento7 páginasSemáforos con PLC y TIA PortalAlex Pintado50% (2)
- Tipos de PLCDocumento5 páginasTipos de PLCRoderick MirelesAún no hay calificaciones
- Cinta Transportadora de MeclabDocumento2 páginasCinta Transportadora de MeclabPaulina CataldoAún no hay calificaciones
- Silabo 2020-I AUTOMATIZACIÓN Y CONTROL DE PROCESOS INDUSTRIALES ADocumento8 páginasSilabo 2020-I AUTOMATIZACIÓN Y CONTROL DE PROCESOS INDUSTRIALES Aleidy diazAún no hay calificaciones
- Lab8 PLC ContinuoDocumento7 páginasLab8 PLC ContinuoJimiRiveraSedanoAún no hay calificaciones
- Operaciones binarias PLCDocumento25 páginasOperaciones binarias PLCCoqui VasquezAún no hay calificaciones
- El Libro de Automatizacion-MitsubishiDocumento124 páginasEl Libro de Automatizacion-MitsubishiElias Bruno100% (1)
- Informe Auto LavadoDocumento10 páginasInforme Auto LavadoFLAVIOAún no hay calificaciones
- Imforme de FajaDocumento14 páginasImforme de FajaanthonyAún no hay calificaciones
- Laboratorio GET Y PUTDocumento27 páginasLaboratorio GET Y PUTsamuel AdonayAún no hay calificaciones