También podría gustarte
- Introducción al Procesamiento Digital de ImágenesDocumento10 páginasIntroducción al Procesamiento Digital de ImágenesAdalberto ChacínAún no hay calificaciones
- Elementos de PercepcionDocumento3 páginasElementos de PercepcionVeekTor ReevAs50% (2)
- El Sistema Visual HumanoDocumento9 páginasEl Sistema Visual HumanoValentina PintoAún no hay calificaciones
- Qué Es La Imagen PDFDocumento14 páginasQué Es La Imagen PDFJuan Pablo Gallardo GarridoAún no hay calificaciones
- Folleto de Análisis de La ImagenDocumento92 páginasFolleto de Análisis de La ImagenChristian ArmijoAún no hay calificaciones
- Sistema visual humano: estructura del ojo y procesamiento de la informaciónDocumento2 páginasSistema visual humano: estructura del ojo y procesamiento de la informaciónMarialii LunaaAún no hay calificaciones
- Informe - El OjoDocumento16 páginasInforme - El OjoViviana BautistaAún no hay calificaciones
- La Percepción VisualDocumento11 páginasLa Percepción VisualMaria Jose Aguilar EscobarAún no hay calificaciones
- Fisiologia de La VisionDocumento9 páginasFisiologia de La VisionSandrita SeverichAún no hay calificaciones
- 2 Sesión Proceso Visual y Percepción VisualDocumento59 páginas2 Sesión Proceso Visual y Percepción VisualChris S. M.Aún no hay calificaciones
- Propiedades Fisicas de La LuzDocumento17 páginasPropiedades Fisicas de La LuzNohemy CastañoAún no hay calificaciones
- Tarea de OjoDocumento7 páginasTarea de OjoEsmeralda Maciel VilorioAún no hay calificaciones
- Resumen Vision, Audicion EtcDocumento11 páginasResumen Vision, Audicion EtcRuth Esther Nuñez MaldonadoAún no hay calificaciones
- Feria CientíficaDocumento4 páginasFeria CientíficaJuanTapia100% (1)
- La Imagen - Jacques AumontDocumento47 páginasLa Imagen - Jacques AumontJuan Pablo Romero Olmos100% (2)
- Exposicion PercepcionDocumento21 páginasExposicion PercepcionCarol MarcaAún no hay calificaciones
- Tema1 (Cap 1-4) - Introducción A La PercepciónDocumento15 páginasTema1 (Cap 1-4) - Introducción A La Percepciónedu_alimania100% (10)
- Sistema Visual InformacionDocumento6 páginasSistema Visual Informacionandreavalentina278Aún no hay calificaciones
- La visión: el sentido más importanteDocumento7 páginasLa visión: el sentido más importanteorlandobelAún no hay calificaciones
- Proceso de La VisionDocumento18 páginasProceso de La VisionLuci LunaAún no hay calificaciones
- La estructura de la retina y su función en la visiónDocumento7 páginasLa estructura de la retina y su función en la visiónHazel Concepcio Sotelo PortobancoAún no hay calificaciones
- Reporte de Lectura El OjoDocumento3 páginasReporte de Lectura El OjoLuz D LunaAún no hay calificaciones
- Ojo BiónicoDocumento21 páginasOjo BiónicoTomas BruniniAún no hay calificaciones
- Tarea de Ojo...Documento7 páginasTarea de Ojo...francisco vilorioAún no hay calificaciones
- Sistema Sensorial Visual PDocumento8 páginasSistema Sensorial Visual Pmailyn suaresAún no hay calificaciones
- Unidad Tematica 1Documento20 páginasUnidad Tematica 1ALEJANDRO LUNAAún no hay calificaciones
- Vision 1Documento36 páginasVision 1Luana AlmeidaAún no hay calificaciones
- Taller Óptica1 1Documento15 páginasTaller Óptica1 1Angelys RomeroAún no hay calificaciones
- Triptico OficioDocumento2 páginasTriptico OficioWilly Rodrigo Pinto GalvezAún no hay calificaciones
- Gueto Mi Trabajo SicobiologiaDocumento55 páginasGueto Mi Trabajo SicobiologiaRene ZacariasAún no hay calificaciones
- Percepción Visual: Procesos Cognitivos y Fisiología del OjoDocumento12 páginasPercepción Visual: Procesos Cognitivos y Fisiología del OjoIvan Huaman QuispeAún no hay calificaciones
- Mecanismo visión humana 4 fasesDocumento10 páginasMecanismo visión humana 4 fasesJulian Antonio Juarez Vela0% (1)
- Funcionamiento del ojoDocumento21 páginasFuncionamiento del ojoJesus Enrique Rivas CastilloAún no hay calificaciones
- 2-El Ojo Humano PDFDocumento4 páginas2-El Ojo Humano PDFAlexis David Mercado JuarezAún no hay calificaciones
- Cómo Se Realiza El Proceso de La Visión PDFDocumento2 páginasCómo Se Realiza El Proceso de La Visión PDFDIANA LAURA BA�UELOS MONTOYAAún no hay calificaciones
- Percepción visual: proceso activo de interpretaciónDocumento4 páginasPercepción visual: proceso activo de interpretaciónLu' CastrillonAún no hay calificaciones
- El Ojo HumanoDocumento5 páginasEl Ojo HumanoKarlyHBK100% (1)
- ACTIVIDAD 8 SensoDocumento11 páginasACTIVIDAD 8 SensoFAMILIA RUIZAún no hay calificaciones
- Sentido de La Vista - Información, Cómo Funciona, ColoresDocumento7 páginasSentido de La Vista - Información, Cómo Funciona, ColoreskarenAún no hay calificaciones
- La VisionDocumento9 páginasLa VisionrosayselaAún no hay calificaciones
- El Ojo y La VisiónDocumento6 páginasEl Ojo y La VisiónJosué DassaevAún no hay calificaciones
- CAP 3 - La Visión PDFDocumento10 páginasCAP 3 - La Visión PDFMarcelo Javier MartinezAún no hay calificaciones
- Alumbrado Practica 2Documento16 páginasAlumbrado Practica 2Flores Gonzales Marcela LauraAún no hay calificaciones
- PH Tarea 3 y 4 (3) Sistema VisualllDocumento4 páginasPH Tarea 3 y 4 (3) Sistema VisualllEsmeralda Maciel VilorioAún no hay calificaciones
- Actividad # 8 Demostracion - Punto CiegoDocumento8 páginasActividad # 8 Demostracion - Punto CiegoYuni CorderoAún no hay calificaciones
- Los Sentidos en WordDocumento29 páginasLos Sentidos en WordArmando QuiñonesAún no hay calificaciones
- Lab 9-Sentidos de Transducción Física Visión y Equilibrio 2023Documento11 páginasLab 9-Sentidos de Transducción Física Visión y Equilibrio 2023NataliaAún no hay calificaciones
- Clase 3 - Percepción visualDocumento14 páginasClase 3 - Percepción visualmayAún no hay calificaciones
- Visión - Wikipedia, La Enciclopedia LibreDocumento9 páginasVisión - Wikipedia, La Enciclopedia LibreBeto GomitoAún no hay calificaciones
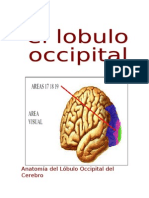
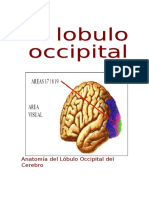
- Lobulo OccipitalDocumento93 páginasLobulo OccipitalJairo Nava Briceño100% (4)
- Tema 4. Psicobiología de La Visión. Versión DefinitivaDocumento10 páginasTema 4. Psicobiología de La Visión. Versión DefinitivaManuel Cañas LucendoAún no hay calificaciones
- Lab Fisiologia 5 Apendice Pruebas Oftalmologicas PDFDocumento8 páginasLab Fisiologia 5 Apendice Pruebas Oftalmologicas PDFAndres Lopez DiagoAún no hay calificaciones
- Tarea 6 El Ojo Como SistemaDocumento8 páginasTarea 6 El Ojo Como SistemaYoldania TaveraAún no hay calificaciones
- La Luz y El Sentido de La VisionDocumento12 páginasLa Luz y El Sentido de La VisionCarlos131091100% (1)
- Vías visuales centrales y reflejo fotomotorDocumento5 páginasVías visuales centrales y reflejo fotomotorCRISTOBAL JAVIER LOPEZ ALISTEAún no hay calificaciones
- La Mirada Opulenta Capitulo 1Documento7 páginasLa Mirada Opulenta Capitulo 1Andrea GarciaAún no hay calificaciones
- Lobulo Occipital PDFDocumento93 páginasLobulo Occipital PDFAngie MendezAún no hay calificaciones
- Unidad 2 VisiónDocumento8 páginasUnidad 2 VisiónSol AldereteAún no hay calificaciones
- Sistema VisualDocumento9 páginasSistema VisualOrbiSalud SaludAún no hay calificaciones
- Beneficios del Cannabis Medicinal en el GlaucomaDe EverandBeneficios del Cannabis Medicinal en el GlaucomaAún no hay calificaciones
- PI Draeger Pss 5000 2018 Edition - En.esDocumento10 páginasPI Draeger Pss 5000 2018 Edition - En.esMartin Jose Gallo SoracaAún no hay calificaciones
- Practica 3. Flujo de FluidosDocumento16 páginasPractica 3. Flujo de FluidosAlfredo Enrique Vásquez Gómez86% (7)
- Historia de Las Matemáticas (Univ. de Málaga) (Poster)Documento1 páginaHistoria de Las Matemáticas (Univ. de Málaga) (Poster)apocacostaAún no hay calificaciones
- Estadistica - Repaso - PC - Semana7 - T - Academia - KC - Chambergo - 12 02 2024 ListoDocumento3 páginasEstadistica - Repaso - PC - Semana7 - T - Academia - KC - Chambergo - 12 02 2024 ListoAlexis EstudioAún no hay calificaciones
- Placa BaseDocumento2 páginasPlaca Basesulsy sally maque mamaniAún no hay calificaciones
- Sección C Estabilidad e Indeterminación Estática y Cinemática de Estructuras PDFDocumento7 páginasSección C Estabilidad e Indeterminación Estática y Cinemática de Estructuras PDFandres murielAún no hay calificaciones
- Memoria de Calculo Boxcoulvert 1X1X5MTS Parcelas El Brillante-Guaranda.Documento24 páginasMemoria de Calculo Boxcoulvert 1X1X5MTS Parcelas El Brillante-Guaranda.Alvaro Manuel Ruiz CardonaAún no hay calificaciones
- Tema - 4 - Acciones Sobre Las EstructurasDocumento23 páginasTema - 4 - Acciones Sobre Las EstructurasToño MarinAún no hay calificaciones
- Dia 1 - Introduccion Geofisica Aplicada 2023Documento47 páginasDia 1 - Introduccion Geofisica Aplicada 2023RobertoLopezAún no hay calificaciones
- Distribucion Hipergeometicas-WeibullDocumento13 páginasDistribucion Hipergeometicas-WeibullJosè VargasAún no hay calificaciones
- Lab FQ UVDocumento55 páginasLab FQ UVKarina HernándezAún no hay calificaciones
- Campo Electrico Problemas ResueltosDocumento3 páginasCampo Electrico Problemas ResueltosFredy Huaman HuarangaAún no hay calificaciones
- Concreto Climas FriosDocumento38 páginasConcreto Climas Friosjulio sanchez camones100% (1)
- ABL Luz de Seguridad Azul LED APS-S1-0-013Documento1 páginaABL Luz de Seguridad Azul LED APS-S1-0-013Carlos MurilloAún no hay calificaciones
- Instalación y configuración de redes: Medios de transmisiónDocumento61 páginasInstalación y configuración de redes: Medios de transmisióneuyarteAún no hay calificaciones
- Peligro de CizallamientoDocumento2 páginasPeligro de CizallamientoJ RendónAún no hay calificaciones
- 1.6REACCION QUIMICA - PDF Versión 1Documento4 páginas1.6REACCION QUIMICA - PDF Versión 1BernardoAún no hay calificaciones
- Equivalencias numéricasDocumento18 páginasEquivalencias numéricasYOVANNAAún no hay calificaciones
- ¿Qué Son Las Secciones Cónicas - (Definición, Tipos y Ejemplos)Documento4 páginas¿Qué Son Las Secciones Cónicas - (Definición, Tipos y Ejemplos)Saul ErazoAún no hay calificaciones
- Talleres Cal IntegralDocumento13 páginasTalleres Cal Integralandrespi3Aún no hay calificaciones
- Catálogo de Producto 2018 - Fregadoras AS5160 y AS5160TDocumento32 páginasCatálogo de Producto 2018 - Fregadoras AS5160 y AS5160TJamie MureeloAún no hay calificaciones
- Seccionador en Vacio PowerIT PS15Documento8 páginasSeccionador en Vacio PowerIT PS15crcruzpAún no hay calificaciones
- Reparacion Lampara LEDDocumento25 páginasReparacion Lampara LEDMast CaAún no hay calificaciones
- Soler Polo DiegoDocumento196 páginasSoler Polo DiegoSergiobrightAún no hay calificaciones
- El Origen Del UniversoDocumento3 páginasEl Origen Del UniversoFelipe RealesAún no hay calificaciones
- Fuerzas intermoleculares líquidos sólidosDocumento23 páginasFuerzas intermoleculares líquidos sólidosAngel Guillermo Bravo BravoAún no hay calificaciones
- Tabla de ConversionesDocumento10 páginasTabla de ConversionesAlfredo Van HousteAún no hay calificaciones
- Laboratorio 12 QuimicaDocumento5 páginasLaboratorio 12 QuimicaAlexis G. MamaniAún no hay calificaciones
- Ficha Tecnica - Electrobomba Centrifuga PDFDocumento10 páginasFicha Tecnica - Electrobomba Centrifuga PDFCristian Xavier Avendaño BelloAún no hay calificaciones