También podría gustarte
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- U4 - Método de Rigidez en Vigas y PórticosDocumento88 páginasU4 - Método de Rigidez en Vigas y PórticosArturoBaldéon75% (4)
- Manual Acrow 700XSDocumento69 páginasManual Acrow 700XSYA SP100% (4)
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- Libro de MonaguillosDocumento41 páginasLibro de Monaguilloscintia_coniglio_6510Aún no hay calificaciones
- El Ana BecoajDocumento2 páginasEl Ana Becoajelias blanquiceth100% (1)
- Comparacion Entre Rigidez y FlexibilidadDocumento18 páginasComparacion Entre Rigidez y FlexibilidadAlejandra Briones MartinezAún no hay calificaciones
- Clase 14-Matriz de Rigidez en Coordenadas GlobalesDocumento19 páginasClase 14-Matriz de Rigidez en Coordenadas GlobalesJordan Aquino RoblesAún no hay calificaciones
- Método Matricial Por RigidezDocumento4 páginasMétodo Matricial Por RigidezBrian Andrés Ávila AlzateAún no hay calificaciones
- Informe de AnalisisDocumento43 páginasInforme de AnalisisHalver de lacruzAún no hay calificaciones
- Metodo de Las RigidecesDocumento22 páginasMetodo de Las Rigidecesrigoberto hernandez perez100% (3)
- Fundamentos Del Método de RigidezDocumento6 páginasFundamentos Del Método de RigidezAykell Lacayo100% (1)
- Informe Laboratorio Electrónica I DiodosDocumento9 páginasInforme Laboratorio Electrónica I DiodosEdith ContrerasAún no hay calificaciones
- Matriz Rigidez y Su Aplicación en El Cálculo de Estructural y EjemploDocumento5 páginasMatriz Rigidez y Su Aplicación en El Cálculo de Estructural y EjemploMario Eduardo Delgado LucioAún no hay calificaciones
- UII-1 Metodo Matricial de RegidezDocumento69 páginasUII-1 Metodo Matricial de RegidezLenin Hiancarlo Garrido FernandezAún no hay calificaciones
- Análisis estructural por desplazamientosDocumento18 páginasAnálisis estructural por desplazamientosLuigui Tipacti GomezAún no hay calificaciones
- Matriz rigidez elementos pórticosDocumento50 páginasMatriz rigidez elementos pórticosJimmy Antony Díaz VillarAún no hay calificaciones
- Métodos Heurísticos de Planeación AgregadaDocumento11 páginasMétodos Heurísticos de Planeación AgregadaYeser Polino CotrinaAún no hay calificaciones
- Informe de Control Específico #024-2021-2-2137-SceDocumento63 páginasInforme de Control Específico #024-2021-2-2137-SceJorge Moncada MinoAún no hay calificaciones
- WEQWEDocumento26 páginasWEQWEADP25% (8)
- Análisis de Pórticos Con El Uso Del Método de La RigidezDocumento17 páginasAnálisis de Pórticos Con El Uso Del Método de La RigidezDiego Torres LeonardoAún no hay calificaciones
- Analisis Estructural IIDocumento22 páginasAnalisis Estructural IIgabrielAún no hay calificaciones
- Trabajo Individual - Benites Palomino LeeannDocumento22 páginasTrabajo Individual - Benites Palomino Leeannleeann benitesAún no hay calificaciones
- Resolucion de PorticosDocumento65 páginasResolucion de PorticosEdwinGioMoralesAún no hay calificaciones
- de La Sesión 1 Analisis Estructural IiDocumento30 páginasde La Sesión 1 Analisis Estructural IiDIEGO ALEXANDER REQUENA PERALTAAún no hay calificaciones
- 06-05-2020 220456 PM SESIÓN 1 ANALISIS ESTRUCTURAL II - INTRODUCCION A LOS METODOS MATRICIALES - 2020 IDocumento16 páginas06-05-2020 220456 PM SESIÓN 1 ANALISIS ESTRUCTURAL II - INTRODUCCION A LOS METODOS MATRICIALES - 2020 IArturo ValienteAún no hay calificaciones
- Trabajo 01Documento73 páginasTrabajo 01Alejandro Richard TICONA MAMANIAún no hay calificaciones
- Sesion #1Documento30 páginasSesion #1Erick CiezaAún no hay calificaciones
- Metodo de La RigidezDocumento21 páginasMetodo de La Rigidezsabino amable huamanAún no hay calificaciones
- Análisis estructural con método de rigidezDocumento47 páginasAnálisis estructural con método de rigidezFredy Ronald Huaman CunyasAún no hay calificaciones
- Estructura 2 Metodo de RigidezDocumento7 páginasEstructura 2 Metodo de RigidezJoyner UrbinaAún no hay calificaciones
- Clase 12-Introduccion Al Analisis Matricial de EstructurasDocumento22 páginasClase 12-Introduccion Al Analisis Matricial de Estructurasroland3489100% (1)
- Método rigidez matricesDocumento7 páginasMétodo rigidez matricesKarol Sotomayor Gonzales100% (1)
- Analisis MatricialDocumento3 páginasAnalisis MatricialMiguel RomeroAún no hay calificaciones
- Sistemas de Varios Grados de LibertadDocumento32 páginasSistemas de Varios Grados de LibertadYarsi PadillaAún no hay calificaciones
- 01 ArmadurasDocumento32 páginas01 ArmadurasIsa OlmedoAún no hay calificaciones
- 6.-Introduccion Al Analisis Estructural MatricialDocumento54 páginas6.-Introduccion Al Analisis Estructural Matricialyasna_torres7165Aún no hay calificaciones
- Análisis y diseño de puentes curvos en viga cajónDocumento13 páginasAnálisis y diseño de puentes curvos en viga cajónWy ApAún no hay calificaciones
- Analisis de Matriz Estructural IIDocumento10 páginasAnalisis de Matriz Estructural IIPercy Obando AdrianzenAún no hay calificaciones
- Metodo Matricial de La RigidezDocumento19 páginasMetodo Matricial de La RigidezEstructury FordAún no hay calificaciones
- Metodo Matricial de La RigidezDocumento23 páginasMetodo Matricial de La RigidezVelez MartinezAún no hay calificaciones
- Trabajo de Estructuras IDocumento19 páginasTrabajo de Estructuras ILiudmarian DuranAún no hay calificaciones
- 16.1 Y 16.2 Condensación de Ecuaciones-Analisis Estructural 2Documento12 páginas16.1 Y 16.2 Condensación de Ecuaciones-Analisis Estructural 2Peralta Gonzales Alexander JamesAún no hay calificaciones
- Método matricial de la rigidezDocumento10 páginasMétodo matricial de la rigidezVictor Montero ReformeAún no hay calificaciones
- Trabajo de A2Documento32 páginasTrabajo de A2yimy valen ciaAún no hay calificaciones
- Conceptos de Fisica en El Analisis EstructuralDocumento20 páginasConceptos de Fisica en El Analisis EstructuralJose Antonio Osorio AparicioAún no hay calificaciones
- Análisis matricial de estructuras: Método de la rigidez directaDocumento22 páginasAnálisis matricial de estructuras: Método de la rigidez directaLilian MorenoAún no hay calificaciones
- COMPLEMENTODocumento9 páginasCOMPLEMENTOAriel plutarco cardoso herreraAún no hay calificaciones
- II Periodo Introduccion Al Analisis Matricial de EstructurasDocumento16 páginasII Periodo Introduccion Al Analisis Matricial de EstructurasGsus VlsqzAún no hay calificaciones
- Calculo Matricial de EstructurasDocumento35 páginasCalculo Matricial de EstructurasStreeTSpoiLAún no hay calificaciones
- Informe Academico 3 Grupo 3 M.rigidez PorticosDocumento17 páginasInforme Academico 3 Grupo 3 M.rigidez PorticosFrans Romero CernaAún no hay calificaciones
- Apunte Metodo Matricial - Extracto Libro UPC-CIMNEDocumento42 páginasApunte Metodo Matricial - Extracto Libro UPC-CIMNEFacundo OliveroAún no hay calificaciones
- Análisis estructural mediante el método de las rigidecesDocumento15 páginasAnálisis estructural mediante el método de las rigidecesAMPM06 Linda VistaAún no hay calificaciones
- Elementos FinitosDocumento38 páginasElementos FinitosEuyin SollowAún no hay calificaciones
- Deflexion AngularDocumento17 páginasDeflexion AngularflavioAún no hay calificaciones
- Ejes Globales y Locales TareaDocumento17 páginasEjes Globales y Locales TareaLu Belinda ChAún no hay calificaciones
- Metodos de Determinacion de La FlexibilidadDocumento11 páginasMetodos de Determinacion de La Flexibilidad05-ES-HU-DIEGO JESUS ORDOÑEZ RODRIGUEZAún no hay calificaciones
- Estructuras ArticuladasDocumento6 páginasEstructuras Articuladasjuan carlos gutierrez garciaAún no hay calificaciones
- Álgebra abstracta aplicada en ingeniería: casos de aplicación en sistemas difusos tipo 1 y tipo 2De EverandÁlgebra abstracta aplicada en ingeniería: casos de aplicación en sistemas difusos tipo 1 y tipo 2Aún no hay calificaciones
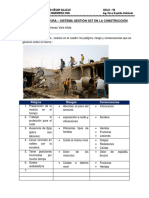
- Formato IPERC 2023Documento33 páginasFormato IPERC 2023HILDA CONTRERAS VELAAún no hay calificaciones
- Aplicacion N 2Documento8 páginasAplicacion N 2HILDA CONTRERAS VELAAún no hay calificaciones
- RESOLUCION (1) AnexosDocumento14 páginasRESOLUCION (1) AnexosHILDA CONTRERAS VELAAún no hay calificaciones
- Mi Foro de Presentacion de TutoriaDocumento1 páginaMi Foro de Presentacion de TutoriaHILDA CONTRERAS VELAAún no hay calificaciones
- Aplicacion N 2Documento8 páginasAplicacion N 2HILDA CONTRERAS VELAAún no hay calificaciones
- RESOLUCION (1) AnexosDocumento14 páginasRESOLUCION (1) AnexosHILDA CONTRERAS VELAAún no hay calificaciones
- Control de Lectura - 2023 - I - Grupo Miercoles HILDA CONTRERAS VELADocumento5 páginasControl de Lectura - 2023 - I - Grupo Miercoles HILDA CONTRERAS VELAHILDA CONTRERAS VELAAún no hay calificaciones
- EXAMEN+PARCIAL+PARTE+I+ (1) Hilda+contreras+velaDocumento6 páginasEXAMEN+PARCIAL+PARTE+I+ (1) Hilda+contreras+velaHILDA CONTRERAS VELAAún no hay calificaciones
- Primer Examen Parcial HidrologiaDocumento3 páginasPrimer Examen Parcial HidrologiaHILDA CONTRERAS VELAAún no hay calificaciones
- Primer Examen Parcial HidrologiaDocumento7 páginasPrimer Examen Parcial HidrologiaHILDA CONTRERAS VELAAún no hay calificaciones
- CONCRETODocumento12 páginasCONCRETOHILDA CONTRERAS VELAAún no hay calificaciones
- Deflacción de Precios de InsumosDocumento1 páginaDeflacción de Precios de InsumosHILDA CONTRERAS VELAAún no hay calificaciones
- Hidrología-Practica-Calificada-Cesar-VallejoDocumento2 páginasHidrología-Practica-Calificada-Cesar-VallejoHILDA CONTRERAS VELAAún no hay calificaciones
- Mejoramiento del sistema de agua potable en Villa Atahualpa, ChimboteDocumento14 páginasMejoramiento del sistema de agua potable en Villa Atahualpa, ChimboteHILDA CONTRERAS VELAAún no hay calificaciones
- Sesion 4 Estudio de Una TormentaDocumento28 páginasSesion 4 Estudio de Una TormentaHILDA CONTRERAS VELAAún no hay calificaciones
- Canal hidráulico examen Obras HidráulicasDocumento1 páginaCanal hidráulico examen Obras HidráulicasHILDA CONTRERAS VELAAún no hay calificaciones
- El PSA: Una Estrategia Complementaria para La Adaptación Al Cambio Climático y La Mitigación de Sus EfectosDocumento11 páginasEl PSA: Una Estrategia Complementaria para La Adaptación Al Cambio Climático y La Mitigación de Sus EfectosFondo Patrimonio NaturalAún no hay calificaciones
- Anemia Hemolítica ExtracorpuscularDocumento4 páginasAnemia Hemolítica Extracorpuscularvictor cernaAún no hay calificaciones
- Plan de TesisDocumento24 páginasPlan de Tesiseddson leonAún no hay calificaciones
- Historia de Las Artes DecorativasDocumento78 páginasHistoria de Las Artes DecorativasiancasvitAún no hay calificaciones
- Trabajo de Potencia # 5Documento43 páginasTrabajo de Potencia # 5JOSÉ GREGORIO GUZMAN ACEVEDOAún no hay calificaciones
- Itrim - R.M. - 3er Año - Guia Nº1 - Regla de 3 SimpleDocumento4 páginasItrim - R.M. - 3er Año - Guia Nº1 - Regla de 3 SimpleAndre ManriqueAún no hay calificaciones
- EJERCICIOS Modulo GRepuestos 2022Documento4 páginasEJERCICIOS Modulo GRepuestos 2022Ruben MorenoAún no hay calificaciones
- Resumen - La Radio Por Dentro y Por FueraDocumento7 páginasResumen - La Radio Por Dentro y Por FueraGabriela HernandezAún no hay calificaciones
- Deber 4 - 1. Aplicaciones (Problemas Geométricos) PDFDocumento2 páginasDeber 4 - 1. Aplicaciones (Problemas Geométricos) PDFLeonardo SerranoAún no hay calificaciones
- Tecnologia de Polimeros - M Beltran PDFDocumento82 páginasTecnologia de Polimeros - M Beltran PDFareanneAún no hay calificaciones
- QAC G1 E3 Practica3Documento3 páginasQAC G1 E3 Practica3MaferGuzmánAún no hay calificaciones
- Catalogo de ConceptosDocumento12 páginasCatalogo de ConceptosBelen LaureanoAún no hay calificaciones
- Cerco PerimetricoDocumento31 páginasCerco PerimetricoGiancarlo Flores DelgadoAún no hay calificaciones
- Acidos nucleicos y nucleótidosDocumento46 páginasAcidos nucleicos y nucleótidosG.CAún no hay calificaciones
- Plan de Preparación y Respuesta Ante EmergenciaDocumento11 páginasPlan de Preparación y Respuesta Ante EmergenciacarlosAún no hay calificaciones
- Cuestionario Juegos Olimpicos ResueltoDocumento5 páginasCuestionario Juegos Olimpicos Resueltopaula andrea montenegro martinezAún no hay calificaciones
- Reservorio apoyado Arequipa memoria calculo estructuralDocumento13 páginasReservorio apoyado Arequipa memoria calculo estructuralRonald Chire AlvarezAún no hay calificaciones
- Guía de Biología para Preparatoria AbiertaDocumento3 páginasGuía de Biología para Preparatoria AbiertaCynthia H HAún no hay calificaciones
- Antiarrítmicos: principales clases y efectosDocumento2 páginasAntiarrítmicos: principales clases y efectosLilibeth Juliana Rojas CarrilloAún no hay calificaciones
- Especificaciones Tecnicas Comunicaciones Rancas 07 02 2014Documento42 páginasEspecificaciones Tecnicas Comunicaciones Rancas 07 02 2014Leonel NCAún no hay calificaciones
- Estudio de La Célula 7 Año Tema 1Documento20 páginasEstudio de La Célula 7 Año Tema 1Mercedes GurdianAún no hay calificaciones
- Gestion Ambiental y Salud Escolar Modulo 4 MARIA CHAVEZDocumento13 páginasGestion Ambiental y Salud Escolar Modulo 4 MARIA CHAVEZLuis Alberto Coca LazoAún no hay calificaciones
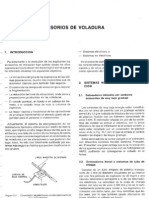
- 13 - Accesorios de VoladuraDocumento17 páginas13 - Accesorios de Voladuraflo696869100% (3)
- Neurosis CardiacaDocumento14 páginasNeurosis CardiacaEduardoBarriosAún no hay calificaciones