También podría gustarte
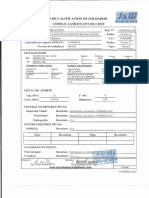
- Calificacion de SoldadorDocumento2 páginasCalificacion de SoldadorMauro León33% (3)
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311De EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Calificación: 2 de 5 estrellas2/5 (1)
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDe EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Guía de Estudio N°2 Sistema de Control NOTA 7Documento14 páginasGuía de Estudio N°2 Sistema de Control NOTA 7Nicolas AhumadaAún no hay calificaciones
- Sistema Realimentado Con Pid PDFDocumento17 páginasSistema Realimentado Con Pid PDFCesarLavadoAún no hay calificaciones
- Sistemas de control lazo abierto vs cerradoDocumento5 páginasSistemas de control lazo abierto vs cerradoMiguel AngelAún no hay calificaciones
- UNIDAD 1. Control ClasicoDocumento13 páginasUNIDAD 1. Control ClasicoJoaquin Celaya GarciaAún no hay calificaciones
- Acciones de ControlDocumento39 páginasAcciones de ControlRicardo Cuellar Aquino100% (2)
- Función de Transferencia, Diagramas de Bloque y Diagramas de Flujo de Señal (FlujogramasDocumento25 páginasFunción de Transferencia, Diagramas de Bloque y Diagramas de Flujo de Señal (Flujogramaskirito bassAún no hay calificaciones
- Control AnalogicoDocumento6 páginasControl Analogicofray1308Aún no hay calificaciones
- Formato Consulta LazosDocumento4 páginasFormato Consulta LazosFred R V. ToapantaAún no hay calificaciones
- Introducción a los sistemas de controlDocumento3 páginasIntroducción a los sistemas de controlFrancisco QuintanillaAún no hay calificaciones
- Resumen Capítulo 1Documento16 páginasResumen Capítulo 1Leonardo Villarreal PérezAún no hay calificaciones
- Sistema de ControlDocumento16 páginasSistema de Controlluis romeroAún no hay calificaciones
- La Guía Manga de La ElectrónicaDocumento3 páginasLa Guía Manga de La ElectrónicachecoeleguaAún no hay calificaciones
- Terminología y Definiciones Básicas PDFDocumento4 páginasTerminología y Definiciones Básicas PDFYohelis ZapataAún no hay calificaciones
- Dinámica Aplicada y Teoría de Control-Tarea #2Documento10 páginasDinámica Aplicada y Teoría de Control-Tarea #2Juan HawkinsAún no hay calificaciones
- Tarea 1 de ControlDocumento2 páginasTarea 1 de ControlBenjamin Dominguez CastelazoAún no hay calificaciones
- Controladores industrialesDocumento6 páginasControladores industrialesJung Angy Lee100% (1)
- Sistema de Control de Lazo CerradoDocumento5 páginasSistema de Control de Lazo CerradoRoberto Gustavo LlanesAún no hay calificaciones
- Sistema de Control Automático y Alineación.Documento13 páginasSistema de Control Automático y Alineación.Eduard GamboaAún no hay calificaciones
- Sistemas de Control en Lazo Abierto y CerradoDocumento26 páginasSistemas de Control en Lazo Abierto y CerradoHomero Esquivel Cedillo100% (1)
- Lazo Abierto Lazo CerradoDocumento23 páginasLazo Abierto Lazo CerradoCristhian Alcocer PolancoAún no hay calificaciones
- INGENIERÍA MECATRÓNICA Ensayo ControlDocumento10 páginasINGENIERÍA MECATRÓNICA Ensayo ControlchekoronaldoAún no hay calificaciones
- Resumen Sistemas de ControlDocumento7 páginasResumen Sistemas de ControlFranklin Morillo100% (3)
- S1 IniaDocumento8 páginasS1 IniaKenia PáezAún no hay calificaciones
- Control 1Documento71 páginasControl 1Kevin AriasAún no hay calificaciones
- Sistema de Lazo Abierto y CerradoDocumento5 páginasSistema de Lazo Abierto y Cerradodixon rojasAún no hay calificaciones
- Unidad 1. Conceptos Básicos de ControlDocumento7 páginasUnidad 1. Conceptos Básicos de ControlSaul Perez PerezAún no hay calificaciones
- Actividad 3 Sistemas de ControlDocumento9 páginasActividad 3 Sistemas de ControlJeziel TovarAún no hay calificaciones
- Ensayo Control 1Documento5 páginasEnsayo Control 1cheo90100% (1)
- Controladores Unidad 4Documento17 páginasControladores Unidad 4Sol Garcia Vazquez100% (1)
- T6 - Sistemas de Control - IeDocumento24 páginasT6 - Sistemas de Control - IeMARISSA IVONNE CRUZ DAVIDAún no hay calificaciones
- Imprimible Sca s1Documento9 páginasImprimible Sca s1Alejandra janethAún no hay calificaciones
- Informe InstrumentacionDocumento7 páginasInforme InstrumentacionAndrewRAún no hay calificaciones
- Cuestionario CONTROLADORESDocumento5 páginasCuestionario CONTROLADORESAbezaid Gamez100% (1)
- Introduccion de Control AutomaticoDocumento6 páginasIntroduccion de Control AutomaticoJackys Jimenez100% (3)
- RefuerzoDocumento35 páginasRefuerzoRed SoldierAún no hay calificaciones
- Que Es Un SistemaDocumento10 páginasQue Es Un SistemaBarry Daniel Duran RojasAún no hay calificaciones
- 4 Sistemas de ControlDocumento6 páginas4 Sistemas de ControlRAMOS PAREDES Jhanpier PedroAún no hay calificaciones
- Introducción A Los Sistemas de Control, ResumenDocumento5 páginasIntroducción A Los Sistemas de Control, ResumenYered TCAún no hay calificaciones
- Informe - U2 - Electroneumática - Técnica Proporcional - Peralvo - Quinga - ValenciaDocumento6 páginasInforme - U2 - Electroneumática - Técnica Proporcional - Peralvo - Quinga - ValenciaCristian AndrésAún no hay calificaciones
- 21502-15 TECNOLOGÍA DE CONTROL - Introduccion Al Modelado de Sistemas Fisicos PDFDocumento15 páginas21502-15 TECNOLOGÍA DE CONTROL - Introduccion Al Modelado de Sistemas Fisicos PDFFox NekAún no hay calificaciones
- Sistema control lazo abierto cerradoDocumento8 páginasSistema control lazo abierto cerradoIsma RománAún no hay calificaciones
- UC - PC - Unidad 1Documento5 páginasUC - PC - Unidad 1juan ruizAún no hay calificaciones
- 1.1 Marco ConceptualDocumento10 páginas1.1 Marco ConceptualElian GaCuAún no hay calificaciones
- Sistema Lazo Abierto y CerradoDocumento6 páginasSistema Lazo Abierto y Cerradoaide natalyAún no hay calificaciones
- Control I ResumenDocumento11 páginasControl I ResumenMarco Antonio CiauAún no hay calificaciones
- Diapositivas Temas 19-24 JAGBDocumento16 páginasDiapositivas Temas 19-24 JAGBjoseantoniojagbAún no hay calificaciones
- 21504-16 TECNOLOGIAS DE CONTROL Introducción Al Modelado de Sistemas FísicosDocumento15 páginas21504-16 TECNOLOGIAS DE CONTROL Introducción Al Modelado de Sistemas FísicosTGAAún no hay calificaciones
- Introducción A Los Sistemas de ControlDocumento8 páginasIntroducción A Los Sistemas de ControlDaniela BlascoAún no hay calificaciones
- Sistemas de control I: introducción a los conceptos básicosDocumento19 páginasSistemas de control I: introducción a los conceptos básicosJuan Andrade TasendeAún no hay calificaciones
- Introduccion A Los Sistemas de ControlDocumento6 páginasIntroduccion A Los Sistemas de ControlCarlos OrtizAún no hay calificaciones
- Unidad 1 Ingenieria de Control Clasico 1Documento22 páginasUnidad 1 Ingenieria de Control Clasico 1JORGESOLANOIEM100% (4)
- Samuel Garcia Escobar - Modelacion Dinamica de SistemasDocumento30 páginasSamuel Garcia Escobar - Modelacion Dinamica de SistemasAnne AlcantaraAún no hay calificaciones
- Capitulo 1 ModificadoDocumento10 páginasCapitulo 1 ModificadodanixaAún no hay calificaciones
- Control IndustrialDocumento34 páginasControl IndustrialTren ColeAún no hay calificaciones
- p3 Resumen Sistemas DinamicosDocumento4 páginasp3 Resumen Sistemas DinamicosEdwin GuzmánAún no hay calificaciones
- Algebra de BloquesDocumento33 páginasAlgebra de BloquesAlexander Mendez100% (1)
- Manual Universitario de Sistemas de Control AutomaticoDocumento33 páginasManual Universitario de Sistemas de Control AutomaticoAlexAún no hay calificaciones
- Control LinealDocumento15 páginasControl LinealAdriann Lopez MartinezAún no hay calificaciones
- Taller 1 Documentar El Proyecto de Automatización para Un Proceso de Manufactura ManualDocumento53 páginasTaller 1 Documentar El Proyecto de Automatización para Un Proceso de Manufactura ManualJonathann M MarttinezAún no hay calificaciones
- Tallern2nnrealizarnesquemasndenplanosndensituacion 40621420ac586d9Documento7 páginasTallern2nnrealizarnesquemasndenplanosndensituacion 40621420ac586d9Jonathann M MarttinezAún no hay calificaciones
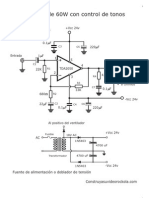
- Tda2050 TonosDocumento8 páginasTda2050 TonosMimo BioAún no hay calificaciones
- Tallern5nnrealizarnesquemasndenplanosndensituacion 10621428862035bDocumento3 páginasTallern5nnrealizarnesquemasndenplanosndensituacion 10621428862035bJonathann M MarttinezAún no hay calificaciones
- Tda2050 TonosDocumento8 páginasTda2050 TonosMimo BioAún no hay calificaciones
- Informe Flip FlopsDocumento7 páginasInforme Flip FlopsJonathann M MarttinezAún no hay calificaciones
- Informe QuartuzDocumento5 páginasInforme QuartuzJonathann M MarttinezAún no hay calificaciones
- Digitales 2Documento4 páginasDigitales 2Jonathann M MarttinezAún no hay calificaciones
- Laboratorio Digital 2Documento5 páginasLaboratorio Digital 2Jonathann M MarttinezAún no hay calificaciones
- ColombiaDocumento81 páginasColombiaCarlos Romero GarciaAún no hay calificaciones
- Laboratorio Telecomunicaciones TV AnalogicaDocumento14 páginasLaboratorio Telecomunicaciones TV AnalogicaJonathann M MarttinezAún no hay calificaciones
- Articulo de Revision - Piloto de DronDocumento3 páginasArticulo de Revision - Piloto de DronJonathann M MarttinezAún no hay calificaciones
- ColombiaDocumento81 páginasColombiaCarlos Romero GarciaAún no hay calificaciones
- Manual en Espanol Controlador R7494 y Detector UVIR C7052J PDFDocumento4 páginasManual en Espanol Controlador R7494 y Detector UVIR C7052J PDFfrancisco salazarAún no hay calificaciones
- FN - 7.1 Mapa de Riesgo Rev.03Documento6 páginasFN - 7.1 Mapa de Riesgo Rev.03Mariela AmayaAún no hay calificaciones
- Motor XsaraDocumento25 páginasMotor Xsaramarino246Aún no hay calificaciones
- Análisis químicos muestras planta tratamiento GreenexDocumento23 páginasAnálisis químicos muestras planta tratamiento GreenexDiego Fernando Sevillano CastilloAún no hay calificaciones
- Hábitos de Vida Saludable PDFDocumento1 páginaHábitos de Vida Saludable PDFGener EdinsoAún no hay calificaciones
- Métodos científicos clasificaciónDocumento2 páginasMétodos científicos clasificaciónJulio Jesus Vc79% (39)
- Examen Uni PDFDocumento33 páginasExamen Uni PDFRicardo Vásquez Plasencia50% (2)
- Volquetes para transporte y descarga de materialesDocumento22 páginasVolquetes para transporte y descarga de materialesJohn CornejoAún no hay calificaciones
- Exploracion EspacialDocumento2 páginasExploracion EspacialXimena HerreraAún no hay calificaciones
- Taller de Química DécimoDocumento2 páginasTaller de Química Décimojalcachofa x06Aún no hay calificaciones
- Nro 80 InteriorDocumento64 páginasNro 80 InteriorWolffire777Aún no hay calificaciones
- Analisis Estetico Tema 6Documento10 páginasAnalisis Estetico Tema 6Aitana TorresAún no hay calificaciones
- Presentacion Gerencia de YacimientoDocumento26 páginasPresentacion Gerencia de YacimientoYuvitza MorenoAún no hay calificaciones
- Practica de Quimica General - GasesDocumento4 páginasPractica de Quimica General - GasesCahuaya VCAún no hay calificaciones
- Bio WordDocumento94 páginasBio WordCayetano Neira MatesanzAún no hay calificaciones
- Análisis sensibilidad uso solverDocumento12 páginasAnálisis sensibilidad uso solverFernanda GarcíaAún no hay calificaciones
- Sintesis de Mariologia, FinalDocumento2 páginasSintesis de Mariologia, FinalJuan Pablo LinaresAún no hay calificaciones
- Ley de TalionDocumento3 páginasLey de TalionEspinoza FrancoAún no hay calificaciones
- Resumen Terminos No Definidos, Angulos, y Rectas Paralelas y PerpendicularesDocumento10 páginasResumen Terminos No Definidos, Angulos, y Rectas Paralelas y PerpendicularesStephany SerranoAún no hay calificaciones
- Descargas Parciales en Gearless MillDocumento15 páginasDescargas Parciales en Gearless MillRenso Enrique Cordova AnanqueAún no hay calificaciones
- Tesis Ped. Español Rojas NinoskaDoussang GeanDocumento84 páginasTesis Ped. Español Rojas NinoskaDoussang GeanNinoska Rojas CastroAún no hay calificaciones
- Interp SplinesDocumento21 páginasInterp SplinesAlex Villa100% (1)
- Curso Topografía I problemas propuestos escalas erroresDocumento2 páginasCurso Topografía I problemas propuestos escalas erroresAndy JhomsonAún no hay calificaciones
- ADVANSIS - Vivienda Inteligente - Domotica KONNEX-EIB - Presupuesto - 05016 PDFDocumento19 páginasADVANSIS - Vivienda Inteligente - Domotica KONNEX-EIB - Presupuesto - 05016 PDFJefferson ClaytonAún no hay calificaciones
- Hipertensión ArterialDocumento22 páginasHipertensión ArterialkatiaAún no hay calificaciones
- Elektro Akustika Apunteak 2006Documento48 páginasElektro Akustika Apunteak 2006Gonzalo Bazoalto OlmosAún no hay calificaciones
- Cuestionario FISDocumento9 páginasCuestionario FISHector MartínezAún no hay calificaciones
- El OrgulloDocumento5 páginasEl OrgulloJUAN JOSE ANTELO LANGUIDEYAún no hay calificaciones
- Mecanismos Geneticos BasicosDocumento3 páginasMecanismos Geneticos Basicosalmafuerte3ro100% (1)