También podría gustarte
- Clase 3 Modelado de Sistemas Dinámicos PDFDocumento36 páginasClase 3 Modelado de Sistemas Dinámicos PDFFidel Andía GuzmánAún no hay calificaciones
- Laboratorio6 - Diseño - Control PIDDocumento29 páginasLaboratorio6 - Diseño - Control PIDWilson MorochoAún no hay calificaciones
- Riezgo Cervantes Sanchez - Control - Tarea1 1Documento39 páginasRiezgo Cervantes Sanchez - Control - Tarea1 1ANGEL DAVID SOTO OSORNIOAún no hay calificaciones
- SDC Clase 03 FundamentosDocumento45 páginasSDC Clase 03 FundamentosAle 777Aún no hay calificaciones
- Morocho-Sanchez Practica 7Documento13 páginasMorocho-Sanchez Practica 7Wilson MorochoAún no hay calificaciones
- P5 CP CautomaticoDocumento5 páginasP5 CP CautomaticoSebastian CachiguangoAún no hay calificaciones
- Matematicas Aplicadas Al Control Procesos (TC)Documento34 páginasMatematicas Aplicadas Al Control Procesos (TC)Aldo NTAún no hay calificaciones
- Clase 5, Modelos en Variables de EstadoDocumento28 páginasClase 5, Modelos en Variables de EstadoCarlos GarayAún no hay calificaciones
- Resumen ControlDocumento11 páginasResumen ControlalexAún no hay calificaciones
- Tarea 2 Modelamiento y Sistemas de Primer OrdenDocumento4 páginasTarea 2 Modelamiento y Sistemas de Primer OrdenWilmar Antonio Meneses HernandezAún no hay calificaciones
- Informe Previo N°3Documento8 páginasInforme Previo N°3dsdAún no hay calificaciones
- 5CP Dinamica de Primer OrdenDocumento72 páginas5CP Dinamica de Primer OrdenSineydi ElízabethAún no hay calificaciones
- Act 01 GTRDocumento4 páginasAct 01 GTRTu abuelita feaAún no hay calificaciones
- Guia Laboratorio 1 - CO 2023 IIDocumento4 páginasGuia Laboratorio 1 - CO 2023 IIDavid PacherrezAún no hay calificaciones
- Examen Robotica Unidad3Documento10 páginasExamen Robotica Unidad3alejandrocamposgarcia777Aún no hay calificaciones
- P4 ConProConInt AlanAlvaradoRamirez JonatanAliMedinaMolinaDocumento30 páginasP4 ConProConInt AlanAlvaradoRamirez JonatanAliMedinaMolinaAlan AlvaradoAún no hay calificaciones
- Analisis AscensorDocumento6 páginasAnalisis AscensorJavierAún no hay calificaciones
- Criterios de EstabilidadDocumento29 páginasCriterios de EstabilidadKevin OlAún no hay calificaciones
- Informe Laboratorio 1 (Grupo 1)Documento22 páginasInforme Laboratorio 1 (Grupo 1)ROBERTO GASPAR ESCOBEDO CONTRERASAún no hay calificaciones
- Práctica 2 SPDocumento14 páginasPráctica 2 SPPedro CarreraAún no hay calificaciones
- 4) Sistemas EléctricosDocumento16 páginas4) Sistemas Eléctricosvictor fernandezAún no hay calificaciones
- Modelado de Motores CCDocumento14 páginasModelado de Motores CCKevin Pato MosqueraAún no hay calificaciones
- Modelado de MotorDocumento11 páginasModelado de MotorJose AguilarAún no hay calificaciones
- LaplaceDocumento15 páginasLaplaceJesús Hurtado IzquierdoAún no hay calificaciones
- # 1 Modelado MatemáticoDocumento33 páginas# 1 Modelado MatemáticoSamuel Granados MejíaAún no hay calificaciones
- Transformada LaplaceDocumento9 páginasTransformada LaplaceAndres AguazacoAún no hay calificaciones
- Teoria Del Control Funcion Transferencia y BloquesDocumento49 páginasTeoria Del Control Funcion Transferencia y BloquesJokerwin09Aún no hay calificaciones
- Montalban Coronado Carlos-Lab1 Control2Documento14 páginasMontalban Coronado Carlos-Lab1 Control2Dabiel Jose Facundo PeñaAún no hay calificaciones
- 5 Practica Ing ControlDocumento5 páginas5 Practica Ing ControlArmando LópezAún no hay calificaciones
- Taller 7 ModelosDocumento7 páginasTaller 7 Modelosold gazanAún no hay calificaciones
- Tarea 1 CdePDocumento12 páginasTarea 1 CdePDiego BurgosAún no hay calificaciones
- 2modelamiento 1Documento25 páginas2modelamiento 1Bryan Garcia TiconaAún no hay calificaciones
- Error en Estado EstableDocumento18 páginasError en Estado EstableEdwin Sanchez MAún no hay calificaciones
- Modelos MatemáticosDocumento26 páginasModelos MatemáticosEmmanuel BarcalaAún no hay calificaciones
- Funcion de TransferenciaDocumento8 páginasFuncion de TransferenciaPabloCárdenasG100% (1)
- 9 2 PrimerOrdenDocumento18 páginas9 2 PrimerOrdenEslander CelisAún no hay calificaciones
- Dinámica de SistemasDocumento9 páginasDinámica de SistemasEmma MolinaAún no hay calificaciones
- 3 Laplace Funcion Transferencia PDFDocumento23 páginas3 Laplace Funcion Transferencia PDFSebastian ArismendiAún no hay calificaciones
- Informe Sistema de ControlDocumento14 páginasInforme Sistema de ControlFelipeAlfonsoMuñozMorenoAún no hay calificaciones
- Análisis de Sistemas de 1er OrdenDocumento25 páginasAnálisis de Sistemas de 1er OrdenRaúl QCAún no hay calificaciones
- Chicaiza Alejandro LAB SCA Preparatorio P2Documento3 páginasChicaiza Alejandro LAB SCA Preparatorio P2Alejandro Sebastian Chicaiza TipanAún no hay calificaciones
- 8 Fase1 ConsolidadoDocumento28 páginas8 Fase1 ConsolidadogustavoAún no hay calificaciones
- Laboratorio N°6Documento21 páginasLaboratorio N°6ERICK HUILLCA HUAMANQUISPEAún no hay calificaciones
- Universidad Politécnica SalesianaDocumento7 páginasUniversidad Politécnica SalesianaPablo Andrés GómezAún no hay calificaciones
- LABORATORIODocumento16 páginasLABORATORIOOSCAR VINICIO CHUQUITARCO LAGLAAún no hay calificaciones
- SCII IF7 Sánchez y VillanuevaDocumento8 páginasSCII IF7 Sánchez y Villanuevadsd100% (1)
- PRACTICA 8 y 9-1Documento13 páginasPRACTICA 8 y 9-1Luis Flores LoveraAún no hay calificaciones
- Tarea4 Grupo 41Documento14 páginasTarea4 Grupo 41DEIBY DIAZAún no hay calificaciones
- Asignación Simulink - Ismael PalmaDocumento23 páginasAsignación Simulink - Ismael PalmaVictorAún no hay calificaciones
- Informe de Motor DC TranferenciaDocumento12 páginasInforme de Motor DC Tranferenciaedison cedeñoAún no hay calificaciones
- 6 Modelamiento 1Documento35 páginas6 Modelamiento 1Zkeiik Zaloo AlarconAún no hay calificaciones
- Control de Nivel de AguaDocumento4 páginasControl de Nivel de AguaKevin MiguelinoAún no hay calificaciones
- Unidad 2 - Etapa 3 - Grupo 63Documento37 páginasUnidad 2 - Etapa 3 - Grupo 63Jairo HurtatisAún no hay calificaciones
- EJERCICIO Modelado RLCDocumento3 páginasEJERCICIO Modelado RLCAldo ResendizAún no hay calificaciones
- Me 2Documento24 páginasMe 2Alan NuñezAún no hay calificaciones
- Actividades Previas Practica 1Documento4 páginasActividades Previas Practica 1Carlos PerezAún no hay calificaciones
- 6 Practica Ing ControlDocumento6 páginas6 Practica Ing ControlArmando LópezAún no hay calificaciones
- Ficha MAT Lectura y Esc # 10 Al 20 Refuerzo 27 06 23ewdewDocumento1 páginaFicha MAT Lectura y Esc # 10 Al 20 Refuerzo 27 06 23ewdewVARGAS FELIXAún no hay calificaciones
- Ficha P S Clase Árbol Genealógico 55859653Documento1 páginaFicha P S Clase Árbol Genealógico 55859653VARGAS FELIXAún no hay calificaciones
- Examen Matemática EULERDocumento3 páginasExamen Matemática EULERVARGAS FELIXAún no hay calificaciones
- Ficha 2 21211482Documento1 páginaFicha 2 21211482VARGAS FELIXAún no hay calificaciones
- Arte y Cultura EulereweDocumento1 páginaArte y Cultura EulereweVARGAS FELIXAún no hay calificaciones
- Ficha 55512455Documento1 páginaFicha 55512455VARGAS FELIXAún no hay calificaciones
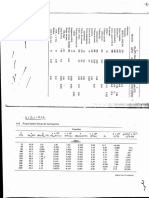
- 11.2 Tabla de PropiedadesDocumento8 páginas11.2 Tabla de PropiedadesVARGAS FELIXAún no hay calificaciones
- Problemas Resueltos de Bombas de Embolo-2022Documento13 páginasProblemas Resueltos de Bombas de Embolo-2022VARGAS FELIXAún no hay calificaciones
- Conversion A GNVDocumento70 páginasConversion A GNVRandy00000Aún no hay calificaciones
- Primer ParcialDocumento1 páginaPrimer ParcialVARGAS FELIXAún no hay calificaciones
- SQA 5 Electronica Industrial IIDocumento5 páginasSQA 5 Electronica Industrial IIVARGAS FELIXAún no hay calificaciones
- Diseño de Una A Plicacion de Un Variador de Tension AlternaDocumento2 páginasDiseño de Una A Plicacion de Un Variador de Tension AlternaVARGAS FELIXAún no hay calificaciones
- Examen Matemática EULERDocumento3 páginasExamen Matemática EULERVARGAS FELIXAún no hay calificaciones
- Matematica Jueves 9Documento2 páginasMatematica Jueves 9VARGAS FELIXAún no hay calificaciones
- La VendimiaDocumento2 páginasLa VendimiaVARGAS FELIXAún no hay calificaciones
- Mecánica AplicadaDocumento26 páginasMecánica AplicadaJhosep Antony H PonceAún no hay calificaciones
- Ficha Aplicativa, Juguemos A Agrupar.Documento2 páginasFicha Aplicativa, Juguemos A Agrupar.VARGAS FELIXAún no hay calificaciones
- Ficha 2 21211482Documento1 páginaFicha 2 21211482VARGAS FELIXAún no hay calificaciones
- AetDocumento1 páginaAetVARGAS FELIXAún no hay calificaciones
- Presentación 1Documento13 páginasPresentación 1VARGAS FELIXAún no hay calificaciones
- El Dominio de La FrecuenciaDocumento10 páginasEl Dominio de La FrecuenciarafaelebratAún no hay calificaciones
- Ejercicio 1 - Oscar ColmenaresDocumento7 páginasEjercicio 1 - Oscar ColmenaresOscar ColmenaresAún no hay calificaciones
- Análisis y Diseño de Controladores Lineales para El Convertidor Elevador (Boost) Bidireccional en CorrienteDocumento61 páginasAnálisis y Diseño de Controladores Lineales para El Convertidor Elevador (Boost) Bidireccional en CorrientealfredokpuAún no hay calificaciones
- TSAI - IV - A - REGULACIÓN AUTOMATICA - LOZADA - JEFFERSON - GUIA - ESTUDIO - CompressedDocumento110 páginasTSAI - IV - A - REGULACIÓN AUTOMATICA - LOZADA - JEFFERSON - GUIA - ESTUDIO - CompressedJefferson LozadaAún no hay calificaciones
- Funciones Transfer en CIA de PulsosDocumento7 páginasFunciones Transfer en CIA de PulsosFabian Gerardo Vallejo JimenezAún no hay calificaciones
- Taller de Estudio 1Documento8 páginasTaller de Estudio 1juan pablo sandoval mejiaAún no hay calificaciones
- Resumen UnidadesDocumento107 páginasResumen UnidadesGusCarlosAún no hay calificaciones
- Modelos Matematicos de Sistemas Fisicos.Documento32 páginasModelos Matematicos de Sistemas Fisicos.Claudio Valdes GutierrezAún no hay calificaciones
- Tema 2.3 Concepto de Polos y CerosDocumento12 páginasTema 2.3 Concepto de Polos y CerosOvadi JezraelAún no hay calificaciones
- Funcion de TransferenciaDocumento26 páginasFuncion de TransferenciaFelipe UgarteAún no hay calificaciones
- 2.1 Modelos Matemáticos de Sistemas Físicos - EléctricosDocumento18 páginas2.1 Modelos Matemáticos de Sistemas Físicos - EléctricosBere OlmosAún no hay calificaciones
- 4-Introducción A SimulinkDocumento28 páginas4-Introducción A SimulinkDani BielsaAún no hay calificaciones
- Sec Tema 5 Control Avanzado 1314a Ocw-5205Documento174 páginasSec Tema 5 Control Avanzado 1314a Ocw-5205Omar CirineoAún no hay calificaciones
- Practica 3er ParcialDocumento2 páginasPractica 3er ParcialVladimir Mamani FloresAún no hay calificaciones
- Lab. Sistema de Primer Orden y Segundo OrdenDocumento15 páginasLab. Sistema de Primer Orden y Segundo OrdenbernardoAún no hay calificaciones
- Problemas Modelado de SistemasDocumento27 páginasProblemas Modelado de Sistemasadin bellatorAún no hay calificaciones
- Ejercicios de Emulación de Sistemas DinámicosDocumento42 páginasEjercicios de Emulación de Sistemas DinámicosUriel Granados SalazarAún no hay calificaciones
- Práctica de Laboratorio #3Documento6 páginasPráctica de Laboratorio #3jesus de la cruzAún no hay calificaciones
- Informe de Motor DC TranferenciaDocumento12 páginasInforme de Motor DC Tranferenciaedison cedeñoAún no hay calificaciones
- Informe MatlabDocumento46 páginasInforme MatlabANDRES SEBASTIAN HIDALGO RUIZAún no hay calificaciones
- Etapa4 Grupo 243005 32 PDFDocumento29 páginasEtapa4 Grupo 243005 32 PDFricardoAún no hay calificaciones
- Asignación #2Documento5 páginasAsignación #2Isaias AlmendralAún no hay calificaciones
- Practica N1 Respuesta Al Escalón de Un Sistema RCDocumento5 páginasPractica N1 Respuesta Al Escalón de Un Sistema RCJuan MuñozAún no hay calificaciones
- Taller Ecuaciones en Diferencia PDFDocumento9 páginasTaller Ecuaciones en Diferencia PDFOrlando Escorcia BallestasAún no hay calificaciones
- Sistemas de Control I PDFDocumento19 páginasSistemas de Control I PDFJuan Andrade TasendeAún no hay calificaciones
- Regulador Del Depósito de Combustible en Antonov An-225 Mriya ModificadoDocumento18 páginasRegulador Del Depósito de Combustible en Antonov An-225 Mriya ModificadoAntonio Gómez GuzmánAún no hay calificaciones
- Sistemas ElectromecanicosDocumento7 páginasSistemas ElectromecanicosEliana EspinosaAún no hay calificaciones
- Modelado de Sistemas MecanicosDocumento21 páginasModelado de Sistemas MecanicosAvril Juas juasAún no hay calificaciones
- Practica 6 - Análisis de Circuitos en Edo TransitorioDocumento5 páginasPractica 6 - Análisis de Circuitos en Edo Transitorioemily colin olivaresAún no hay calificaciones
- INFORME Motores de AcDocumento16 páginasINFORME Motores de Acfabian monroyAún no hay calificaciones
- Anatomía & 100 estiramientos Esenciales (Color): Técnicas, beneficios, precauciones, consejos, tablas de series, dolenciasDe EverandAnatomía & 100 estiramientos Esenciales (Color): Técnicas, beneficios, precauciones, consejos, tablas de series, dolenciasCalificación: 4.5 de 5 estrellas4.5/5 (21)
- Trucos para Leer la Mente de los Demás: Cómo Adivinar el Pensamiento de los Demás con Poco Esfuerzo. 2 Libros en 1 - Secretos de la Psicología Oscura, Cómo ser un Detector de MentirasDe EverandTrucos para Leer la Mente de los Demás: Cómo Adivinar el Pensamiento de los Demás con Poco Esfuerzo. 2 Libros en 1 - Secretos de la Psicología Oscura, Cómo ser un Detector de MentirasCalificación: 4.5 de 5 estrellas4.5/5 (3)
- La metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceDe EverandLa metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceCalificación: 5 de 5 estrellas5/5 (8)
- Reconstrucción de dientes endodonciados: Pautas de actuación clínicaDe EverandReconstrucción de dientes endodonciados: Pautas de actuación clínicaCalificación: 5 de 5 estrellas5/5 (4)
- Disciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreDe EverandDisciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreCalificación: 5 de 5 estrellas5/5 (3)
- Zensorialmente : Dejá que tu cuerpo sea tu cerebroDe EverandZensorialmente : Dejá que tu cuerpo sea tu cerebroAún no hay calificaciones
- La revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaDe EverandLa revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaCalificación: 5 de 5 estrellas5/5 (201)
- Batidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoDe EverandBatidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoCalificación: 5 de 5 estrellas5/5 (2)
- La vibración de las ondas cerebrales: Recuperar el ritmo de una vida saludable y felizDe EverandLa vibración de las ondas cerebrales: Recuperar el ritmo de una vida saludable y felizCalificación: 5 de 5 estrellas5/5 (7)
- Interpretación del ECG: Una Guía Práctica e Intuitiva para Aprender a Leer el ECG y Diagnosticar y Tratar ArritmiasDe EverandInterpretación del ECG: Una Guía Práctica e Intuitiva para Aprender a Leer el ECG y Diagnosticar y Tratar ArritmiasAún no hay calificaciones
- El concepto Mulligan de terapia manual (Color)De EverandEl concepto Mulligan de terapia manual (Color)Calificación: 5 de 5 estrellas5/5 (3)
- Neurocuántica: La nueva frontera de la neurocienciaDe EverandNeurocuántica: La nueva frontera de la neurocienciaCalificación: 5 de 5 estrellas5/5 (1)
- Proyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadDe EverandProyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadCalificación: 5 de 5 estrellas5/5 (1)
- Neurociencia para vencer la depresión: La esprial ascendenteDe EverandNeurociencia para vencer la depresión: La esprial ascendenteCalificación: 4.5 de 5 estrellas4.5/5 (10)
- Neuropsicología: Los fundamentos de la materiaDe EverandNeuropsicología: Los fundamentos de la materiaCalificación: 5 de 5 estrellas5/5 (1)
- Cardiología y enfermedades cardiovascularesDe EverandCardiología y enfermedades cardiovascularesCalificación: 5 de 5 estrellas5/5 (1)
- El péndulo de sanación: Péndulo hebreo. Investigación y sistematización de la técnicaDe EverandEl péndulo de sanación: Péndulo hebreo. Investigación y sistematización de la técnicaCalificación: 4.5 de 5 estrellas4.5/5 (27)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- Neuroanatomía: Fundamentos de neuroanatomía estructural, funcional y clínicaDe EverandNeuroanatomía: Fundamentos de neuroanatomía estructural, funcional y clínicaCalificación: 4 de 5 estrellas4/5 (16)