También podría gustarte
- VectoresDocumento62 páginasVectorescarlos100% (2)
- Resumen de SegmentosDocumento7 páginasResumen de SegmentosKEVIN0% (1)
- Problemas resueltos de electromagnetismo. Volumen I: ElectrostáticaDe EverandProblemas resueltos de electromagnetismo. Volumen I: ElectrostáticaAún no hay calificaciones
- 4º Cuaderno de Trabajo II SemestreDocumento173 páginas4º Cuaderno de Trabajo II Semestreteresa de jesus tapiaAún no hay calificaciones
- Sesión 4 - Cyt 5°-Análisis Vectorial-Para Estud.-Vc 2023Documento4 páginasSesión 4 - Cyt 5°-Análisis Vectorial-Para Estud.-Vc 2023davideduardoAún no hay calificaciones
- Aplicacion de Vectores en ElectricaDocumento7 páginasAplicacion de Vectores en ElectricaDaniela ChafardetAún no hay calificaciones
- 04-11-2019 183316 PM Vectores en El EspacioDocumento46 páginas04-11-2019 183316 PM Vectores en El EspacioYampiersAún no hay calificaciones
- EnsayoDocumento20 páginasEnsayoBcO MegaBaconXAún no hay calificaciones
- Guia 2 Vectores en r2 y r3Documento8 páginasGuia 2 Vectores en r2 y r3Joana Paola Corredor DiazAún no hay calificaciones
- VECTORDocumento8 páginasVECTORHEBERTO QUINTEROAún no hay calificaciones
- S2 HT Vectores TeoríaDocumento5 páginasS2 HT Vectores TeoríaAriana ChamacheAún no hay calificaciones
- Guia 2 Vectores en r2 y r3Documento8 páginasGuia 2 Vectores en r2 y r3Esther Sorany GONZALEZ BUITRAGOAún no hay calificaciones
- Definición VectoresDocumento8 páginasDefinición VectoresKatterine RodriguezAún no hay calificaciones
- VECTORESDocumento4 páginasVECTORESAna CamposAún no hay calificaciones
- Proyecto XHHDocumento4 páginasProyecto XHHHarold SotoAún no hay calificaciones
- HT Semana2 Fisica ArqDocumento5 páginasHT Semana2 Fisica ArqXiomara H.F.C. TøpAún no hay calificaciones
- Guia Final de VectoresDocumento24 páginasGuia Final de Vectoresjhongarcia@itm.edu.co89% (9)
- FISICADocumento17 páginasFISICAedpipa1000Aún no hay calificaciones
- 02 GE VectoresDocumento3 páginas02 GE VectoresAlessio ShooterAún no hay calificaciones
- Manual Calculo VectorialDocumento111 páginasManual Calculo Vectorialservando1957Aún no hay calificaciones
- 1ro Bgu Mat - Revision de VectoresDocumento4 páginas1ro Bgu Mat - Revision de VectoresGAUDY YNDIRA BARZOLA MORENOAún no hay calificaciones
- Clase 3 FisicaDocumento19 páginasClase 3 FisicaChuina E. gpe. hernandez rosadoAún no hay calificaciones
- S2 HT Vectores TeoríaDocumento5 páginasS2 HT Vectores TeoríaLuz AlvaAún no hay calificaciones
- Clase - VectoresDocumento24 páginasClase - VectoresLiliana Pinilla (QN-SFF)Aún no hay calificaciones
- Magnitudes Escalares y FisicasDocumento8 páginasMagnitudes Escalares y FisicasNorman Orlando Armijos ArmijosAún no hay calificaciones
- FISICA1Documento58 páginasFISICA1Henry GaleanoAún no hay calificaciones
- 2 VectoresDocumento37 páginas2 VectoresEfren VazquezAún no hay calificaciones
- 202 VectoresDocumento23 páginas202 VectoresConrard Zuñiga CruzAún no hay calificaciones
- VectoresDocumento19 páginasVectoresDavid Corro CruzAún no hay calificaciones
- Aca 2 Infografia VectoresDocumento5 páginasAca 2 Infografia VectoresMaria ArteagaAún no hay calificaciones
- Vector EsDocumento8 páginasVector EsOmar GarciaAún no hay calificaciones
- Cálculo VectorialDocumento6 páginasCálculo VectorialPablo BARANAún no hay calificaciones
- VectoresDocumento35 páginasVectoresSantiago GonzálezAún no hay calificaciones
- VcetoresDocumento9 páginasVcetoresedgar jarquinAún no hay calificaciones
- Cantidad EscalarDocumento8 páginasCantidad EscalarJazmin Michel Ugalde OrtegaAún no hay calificaciones
- NOTAS DE CLASE AV 1er ParcialDocumento33 páginasNOTAS DE CLASE AV 1er ParcialJosue HernandezAún no hay calificaciones
- Wuolah Free MosqVectoresacrDocumento13 páginasWuolah Free MosqVectoresacrAntón Fernández DíazAún no hay calificaciones
- VectoresDocumento83 páginasVectoresEduardo Loaiza MonteverdeAún no hay calificaciones
- Dinamica Exposicion FinalDocumento236 páginasDinamica Exposicion FinalPatrick CuascotaAún no hay calificaciones
- Sid2b VectoresDocumento8 páginasSid2b VectoresAstridAún no hay calificaciones
- Fisica ++Documento47 páginasFisica ++Martin ZambranoAún no hay calificaciones
- Vectores. Jesus ManuelDocumento31 páginasVectores. Jesus ManuelMeño FVYAún no hay calificaciones
- Calculo VectorialDocumento6 páginasCalculo VectorialinggafabifiAún no hay calificaciones
- Vectores PDFDocumento11 páginasVectores PDF1.Aún no hay calificaciones
- VectoresDocumento11 páginasVectores1.Aún no hay calificaciones
- TRABAJO DE FISICA de Christian TerminadoDocumento19 páginasTRABAJO DE FISICA de Christian Terminadochristian montillaAún no hay calificaciones
- Diapositivas Tema I-EM-I-2ºGradoFisica-2022-parteADocumento21 páginasDiapositivas Tema I-EM-I-2ºGradoFisica-2022-parteAJoan MartinezAún no hay calificaciones
- Unidad 1 - Cinemática de La Partícula-2020Documento33 páginasUnidad 1 - Cinemática de La Partícula-2020Tony FranciulliAún no hay calificaciones
- Lab VectoresDocumento8 páginasLab Vectoresarnold david redondo tanoAún no hay calificaciones
- Tema 1.3 Vectores, Magnitudes Escalar y VectorialDocumento25 páginasTema 1.3 Vectores, Magnitudes Escalar y VectorialAudberto Millones ChafloqueAún no hay calificaciones
- Lab 1 Suma y Resta de Vectores - Alejandra SaavedraDocumento7 páginasLab 1 Suma y Resta de Vectores - Alejandra SaavedraAle Saavedra VargasAún no hay calificaciones
- Presentacion de Mecanica VectorialDocumento46 páginasPresentacion de Mecanica VectorialAshley BalcazarAún no hay calificaciones
- Vector - Wikipedia, La Enciclopedia LibreDocumento18 páginasVector - Wikipedia, La Enciclopedia LibreHamilton Dávila CórdobaAún no hay calificaciones
- Sesión 2.1 - Introducción - Vectores en r2Documento17 páginasSesión 2.1 - Introducción - Vectores en r2jonathan ñamoAún no hay calificaciones
- Tema1-Calculo VectorialDocumento5 páginasTema1-Calculo Vectorialpaula y soniaAún no hay calificaciones
- Fundamentos de Magnitudes Físicas PDFDocumento4 páginasFundamentos de Magnitudes Físicas PDFNagely CabreraAún no hay calificaciones
- Matematicas Iii: 1 VectoresDocumento30 páginasMatematicas Iii: 1 VectoresJosé Luis Avila CabreraAún no hay calificaciones
- 02 Vectores Fisica MariscalDocumento32 páginas02 Vectores Fisica MariscalAndy LilaAún no hay calificaciones
- Unidad IDocumento87 páginasUnidad IDaniel CarmineAún no hay calificaciones
- Ciencias Naturales, Física FundamentalDocumento2 páginasCiencias Naturales, Física Fundamentalvictoria riveraAún no hay calificaciones
- Vectores PDFDocumento14 páginasVectores PDFsilvia daniela zapata caicedoAún no hay calificaciones
- TareaDocumento1 páginaTareaCristian Linares ZeladaAún no hay calificaciones
- Kioto - Conam - PanDocumento15 páginasKioto - Conam - PanCristian Linares ZeladaAún no hay calificaciones
- SílaboDocumento9 páginasSílaboCristian Linares ZeladaAún no hay calificaciones
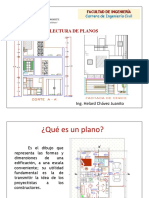
- Lectura de PlanosDocumento33 páginasLectura de PlanosCristian Linares ZeladaAún no hay calificaciones
- Trabajos PreliminaresDocumento8 páginasTrabajos PreliminaresCristian Linares ZeladaAún no hay calificaciones
- P3 Materiales ConstruccionDocumento7 páginasP3 Materiales ConstruccionCristian Linares ZeladaAún no hay calificaciones
- Exposicion Expediente TecnicoDocumento2 páginasExposicion Expediente TecnicoCristian Linares ZeladaAún no hay calificaciones
- Analisis Dimensional ProblemasDocumento2 páginasAnalisis Dimensional ProblemasCristian Linares ZeladaAún no hay calificaciones
- 06 - Criterio de La Segunda DerivadaDocumento18 páginas06 - Criterio de La Segunda DerivadaSebastian Villanueva CastromonteAún no hay calificaciones
- Multiplicadores de LagrangeDocumento3 páginasMultiplicadores de LagrangeGloria Cecilia García PalenciaAún no hay calificaciones
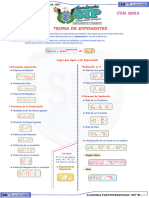
- Teoria de ExponentesDocumento3 páginasTeoria de ExponentesDavid LlontopAún no hay calificaciones
- Centro de GravedadDocumento17 páginasCentro de GravedadCristobal HuarachiAún no hay calificaciones
- 5.3 Capas CilíndricasDocumento11 páginas5.3 Capas CilíndricasPepáAún no hay calificaciones
- Ecuaciones Diferenciales ParcialesDocumento14 páginasEcuaciones Diferenciales ParcialesEstefania CabascangoAún no hay calificaciones
- Tarea N°0 - IQA - 230 - S1 - 2022 - CCDocumento2 páginasTarea N°0 - IQA - 230 - S1 - 2022 - CCSamuel BaezAún no hay calificaciones
- 2020 19 08 01 Modelo MatematicaDocumento52 páginas2020 19 08 01 Modelo MatematicaMariano Saldivia0% (1)
- Metodo MilneRnvdDocumento7 páginasMetodo MilneRnvdRolando Contreras UsseglioAún no hay calificaciones
- Matemáticas 10Documento27 páginasMatemáticas 10Josep AlborAún no hay calificaciones
- Taller FactorizacionDocumento3 páginasTaller FactorizacionLaura SantamariaAún no hay calificaciones
- TAREADocumento8 páginasTAREAJairo Camacho BriceñoAún no hay calificaciones
- Matemáticas Simplificadas Números RealesDocumento10 páginasMatemáticas Simplificadas Números RealesgbaAún no hay calificaciones
- Division Sintetica y Ordenar CuadradosDocumento8 páginasDivision Sintetica y Ordenar CuadradosHef VarelaAún no hay calificaciones
- Tarea 1° - AbastosDocumento16 páginasTarea 1° - AbastosRONALD HUANCACHOQUE ARIASAún no hay calificaciones
- Planeación - Precálculo - 23P (1) - 230809 - 191305Documento3 páginasPlaneación - Precálculo - 23P (1) - 230809 - 191305cbs2232019146Aún no hay calificaciones
- 1.5 Construcción de Funcionales Método de Rayleigh-Ritz para La Aproximación de FuncionalesDocumento6 páginas1.5 Construcción de Funcionales Método de Rayleigh-Ritz para La Aproximación de FuncionalesBelmont D Jose50% (2)
- Relaciones BinariasDocumento25 páginasRelaciones BinariasOscar DavidAún no hay calificaciones
- Estadística Inferencial AntologíaDocumento172 páginasEstadística Inferencial AntologíaKristenAún no hay calificaciones
- Parcial 2 - Algebra Lineal II - D2 - J1 - 2016Documento1 páginaParcial 2 - Algebra Lineal II - D2 - J1 - 2016Santiago Vergara HernandezAún no hay calificaciones
- Presentación 1 Fracciones Equivalentes.Documento17 páginasPresentación 1 Fracciones Equivalentes.Victor PerezAún no hay calificaciones
- Series Notables I: La PascalinaDocumento58 páginasSeries Notables I: La PascalinaNJJJJAún no hay calificaciones
- Convolucion de Dos FuncionesDocumento4 páginasConvolucion de Dos FuncionesNapoleonperezAún no hay calificaciones
- AntiderivadasDocumento6 páginasAntiderivadasMagalyAún no hay calificaciones
- Material Importante de Calculo VectorialDocumento11 páginasMaterial Importante de Calculo VectorialAlejandro J. B.CAún no hay calificaciones
- Matrices Pablo Ledesma MenchónDocumento9 páginasMatrices Pablo Ledesma MenchónmasAún no hay calificaciones
- Ecuaciones e InecuacionesDocumento26 páginasEcuaciones e InecuacionesNeoAún no hay calificaciones
- Metodos de RotacionDocumento20 páginasMetodos de RotacionDiego RojasAún no hay calificaciones