También podría gustarte
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 1 de 5 estrellas1/5 (2)
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Aún no hay calificaciones
- Motor UniversalDocumento7 páginasMotor Universalkrlos1224100% (1)
- ManuelDocumento4 páginasManuelEMMANUEL VASQUEZ SAN PEDROAún no hay calificaciones
- Tipos de Motores EléctricosDocumento17 páginasTipos de Motores EléctricosPeter HenriquezAún no hay calificaciones
- Clasificación de MotoresDocumento7 páginasClasificación de MotoresJuank SimbañaAún no hay calificaciones
- Motores Electricos y Tipos de ArranquesDocumento15 páginasMotores Electricos y Tipos de ArranquesangeldellAún no hay calificaciones
- Tipos de Motores AC y DCDocumento10 páginasTipos de Motores AC y DCAlejandro TrejoAún no hay calificaciones
- Calculo de Motores RONALDDocumento13 páginasCalculo de Motores RONALDJoselyn FannyAún no hay calificaciones
- Actividad 1 UiiDocumento11 páginasActividad 1 UiiHéctor Carrión UrbanoAún no hay calificaciones
- 1.5 Selección de Motores Electricos para BombasDocumento15 páginas1.5 Selección de Motores Electricos para BombasFrancisco Javier Perez HernandezAún no hay calificaciones
- Clases de MotoresDocumento8 páginasClases de MotoresJulinho M LeOnAún no hay calificaciones
- Practica 2 E1Documento17 páginasPractica 2 E1Javier LeeAún no hay calificaciones
- Tipos de Motores ElectricosDocumento23 páginasTipos de Motores ElectricosMichael Erick Hidalgo TicloAún no hay calificaciones
- Motor de Excitación en SerieDocumento4 páginasMotor de Excitación en Seriejosealfred0Aún no hay calificaciones
- Maquinas de Corriente Alterna y Corriente DirectaDocumento40 páginasMaquinas de Corriente Alterna y Corriente DirectaRuben Enrrique Diaz MorenoAún no hay calificaciones
- Principio de Operación de Un Motor EléctricoDocumento13 páginasPrincipio de Operación de Un Motor EléctricoAriasna FigueiraAún no hay calificaciones
- Introducción A Los Motores EléctricosDocumento9 páginasIntroducción A Los Motores Eléctricosjjsagaz100% (1)
- MOTORES ELECTRICOS. Validacion 23Documento13 páginasMOTORES ELECTRICOS. Validacion 23CasiEinsteinAún no hay calificaciones
- Electricidad MotoresDocumento14 páginasElectricidad MotoresLuis JaldinAún no hay calificaciones
- Motores MonofásicosDocumento6 páginasMotores MonofásicosJonathan Freire100% (1)
- MotoresDocumento17 páginasMotoresAlejandra Nova CabreraAún no hay calificaciones
- Maquinas ElectricasDocumento26 páginasMaquinas ElectricasPao VillaAún no hay calificaciones
- Tipos de Motores ElectricosDocumento19 páginasTipos de Motores ElectricospercyAún no hay calificaciones
- Industrial MotoresDocumento13 páginasIndustrial MotoresStefy YanezAún no hay calificaciones
- Consulta-Motores Sincronico y Asincronico-I.EDocumento10 páginasConsulta-Motores Sincronico y Asincronico-I.ELuis Chiluisa ReinosoAún no hay calificaciones
- Motores AcDocumento22 páginasMotores AcJUAN JOSE DIAZ CARRILLOAún no hay calificaciones
- Tipos de Motores ElectricosDocumento10 páginasTipos de Motores ElectricosVicente Jara100% (1)
- Motores de Corriente Continua o DirectaDocumento18 páginasMotores de Corriente Continua o DirectaDavid Alejandro Diaz RinconAún no hay calificaciones
- MmiDocumento7 páginasMmiEfraín MirandaAún no hay calificaciones
- Universal Motor PDFDocumento6 páginasUniversal Motor PDFJoanAlexisBenitezMonsalve85% (13)
- Tipos de Motores ElectricosDocumento12 páginasTipos de Motores ElectricosCamilo Daniel Soto Ruíz DiazAún no hay calificaciones
- Motor UniversalDocumento8 páginasMotor UniversalDanjesús Chambi RomeroAún no hay calificaciones
- Resumen de Control de MotoresDocumento5 páginasResumen de Control de MotoresRebeca Sarisol Perez MontaneAún no hay calificaciones
- Los Motores Eléctricos-GeneralidadesDocumento16 páginasLos Motores Eléctricos-GeneralidadesJuan Acevedo100% (1)
- 6 - Conocimiento de Equipos Rv03Documento102 páginas6 - Conocimiento de Equipos Rv03Gabriel SoteloAún no hay calificaciones
- Motores de Inducción de CaDocumento4 páginasMotores de Inducción de CaJesus ClaraAún no hay calificaciones
- Practica 1 Principio de Operacion Del Motor de InduccionDocumento7 páginasPractica 1 Principio de Operacion Del Motor de InduccionAldo David Silva MartinezAún no hay calificaciones
- Cuestionario de MotoresDocumento13 páginasCuestionario de MotoresBart Barto Impson50% (2)
- Motores de Inducción de Jaula de Ardilla y Motores MonofásicosDocumento6 páginasMotores de Inducción de Jaula de Ardilla y Motores MonofásicosChristopher SánchezAún no hay calificaciones
- Actividad 10Documento9 páginasActividad 10Cesar GVAún no hay calificaciones
- Motores AC DCDocumento5 páginasMotores AC DCJosé MiguelAún no hay calificaciones
- Concepto de Maquinas EléctricasDocumento14 páginasConcepto de Maquinas EléctricasLuis SantanaAún no hay calificaciones
- Clasificacion de MotoresDocumento27 páginasClasificacion de MotoresLuis AcpAún no hay calificaciones
- Análisis de Las Características OperativasDocumento4 páginasAnálisis de Las Características OperativasJuan Pablo Elias100% (1)
- Máquina de Corriente ContinuaDocumento86 páginasMáquina de Corriente ContinuaMerlysAún no hay calificaciones
- Proyecto de TallerDocumento18 páginasProyecto de TallerLuis Obando100% (2)
- Motores de Induccion TrifasicosDocumento68 páginasMotores de Induccion TrifasicosRICARDO ANDRES ARANIBAR YOVERAAún no hay calificaciones
- Motores de CC MEIIDocumento19 páginasMotores de CC MEIIJohansenAún no hay calificaciones
- Motores EléctricosDocumento12 páginasMotores EléctricosAnonymous gYak8yHAún no hay calificaciones
- EL MOTOR UNIVERSAL II Ejemplo de EjercicioDocumento10 páginasEL MOTOR UNIVERSAL II Ejemplo de Ejerciciocarlos riveraAún no hay calificaciones
- Electricidad 1Documento10 páginasElectricidad 1Javier ChechuAún no hay calificaciones
- Maquina Eléctrica Rotativa Motores:: Motor de Corriente ContinuaDocumento9 páginasMaquina Eléctrica Rotativa Motores:: Motor de Corriente ContinuaDiego Santos (DrumHealer)Aún no hay calificaciones
- UT06. - Motores de Corriente Contínua.Documento26 páginasUT06. - Motores de Corriente Contínua.Jhezy Andron AndronAún no hay calificaciones
- Control de Motores ElectricosDocumento64 páginasControl de Motores ElectricosNoe Mexicano Gobantes100% (1)
- Clasificacion de Los Motores de Corriente ContinuaDocumento8 páginasClasificacion de Los Motores de Corriente ContinuaAbel CoronelAún no hay calificaciones
- Curso Motores de CADocumento20 páginasCurso Motores de CAtroyanmenAún no hay calificaciones
- Motores ElectricosDocumento22 páginasMotores ElectricosHelvin Loren Campos CastilloAún no hay calificaciones
- Motor de Corriente AlternaDocumento5 páginasMotor de Corriente AlternaLuis SaraviaAún no hay calificaciones
- Tipos de ArranqueDocumento6 páginasTipos de Arranquehuichole100% (1)
- Ergonomia Teoria 1 Parte 1 2021Documento41 páginasErgonomia Teoria 1 Parte 1 2021Jhoanna Tito JaldinAún no hay calificaciones
- Analisis de La DemandaDocumento8 páginasAnalisis de La DemandaJuan Quispe HuancaAún no hay calificaciones
- 5Documento17 páginas5juanAún no hay calificaciones
- OGP Handbook-Rules-And-Guidance ES 20200313Documento24 páginasOGP Handbook-Rules-And-Guidance ES 20200313ErikaAún no hay calificaciones
- Plan de Produccion 8tavDocumento8 páginasPlan de Produccion 8tavEdward Segura AlcantaraAún no hay calificaciones
- Laboratorio 6.1 Configuración Básica Arrancador Estado SólidoDocumento18 páginasLaboratorio 6.1 Configuración Básica Arrancador Estado SólidoAdriano Rodriguez RoqueAún no hay calificaciones
- Manifiesto de CargaDocumento1 páginaManifiesto de CargaIvan Alvarez LopezAún no hay calificaciones
- La Comunidad Zoe Xiques SilvaDocumento19 páginasLa Comunidad Zoe Xiques SilvaIrving Rivas VillanuevaAún no hay calificaciones
- CUJILEMADocumento17 páginasCUJILEMAANTHONY DANIEL GOMEZ RODRIGUEZAún no hay calificaciones
- Ejemplo 1: Calcular Solución: A: Plicando Fracciones ParcialesDocumento10 páginasEjemplo 1: Calcular Solución: A: Plicando Fracciones ParcialesJulio A. Vallarino R.Aún no hay calificaciones
- Modelo de Gestion PublicaDocumento17 páginasModelo de Gestion PublicaSantys Israel BAún no hay calificaciones
- Constancia de Semanas Cotizadas Del AseguradoDocumento11 páginasConstancia de Semanas Cotizadas Del Aseguradobernado lopezAún no hay calificaciones
- Ejercicio Semana 9 - Hecho en ClaseDocumento3 páginasEjercicio Semana 9 - Hecho en ClaseSKY ClAún no hay calificaciones
- 21 ÉmboloDocumento2 páginas21 ÉmboloDe los Reyes Reparaciones y VentasAún no hay calificaciones
- Memoria - Descriptiva Casa HabitaciónDocumento5 páginasMemoria - Descriptiva Casa HabitaciónPerz Gomz CristobalAún no hay calificaciones
- Reporte de EstadiaDocumento59 páginasReporte de EstadiaRafael Ocampo valentinAún no hay calificaciones
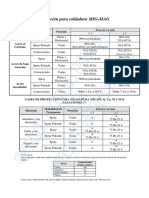
- Tablas para Gases de Proteccion y de Respaldo Mas UtilizadosDocumento2 páginasTablas para Gases de Proteccion y de Respaldo Mas UtilizadosCARLITOSAún no hay calificaciones
- 1 CLASE 1 Uniones AtornilladasDocumento14 páginas1 CLASE 1 Uniones Atornilladasprince zamudioAún no hay calificaciones
- Scanner TopograficoDocumento6 páginasScanner TopograficoCruz De la Cruz Peniel MahytteAún no hay calificaciones
- Caso Práctico - Gestion Del RiesgoDocumento5 páginasCaso Práctico - Gestion Del RiesgoJonathan Castro CuestasAún no hay calificaciones
- Caratula Piu Actividad4Documento7 páginasCaratula Piu Actividad4Michelle SanchezAún no hay calificaciones
- 10120404Documento2 páginas10120404Daniel Hernandez JuarezAún no hay calificaciones
- Tarea4 AuraTovar 50004 89Documento3 páginasTarea4 AuraTovar 50004 89aura tovarAún no hay calificaciones
- 2.4. Método Regula-FalsiDocumento3 páginas2.4. Método Regula-FalsiKaty IAún no hay calificaciones
- Manual Transmision y MovimientoDocumento22 páginasManual Transmision y MovimientoUnd AngAún no hay calificaciones
- YAMATO Re 300-600-800 Manual FinalDocumento53 páginasYAMATO Re 300-600-800 Manual FinalMario Alfonso MartinezAún no hay calificaciones
- Informe de Práctica IDocumento26 páginasInforme de Práctica ISeremim Ltda.Aún no hay calificaciones
- Destilacion de Compuestos OrganicosDocumento3 páginasDestilacion de Compuestos OrganicosPedro CifuentesAún no hay calificaciones
- Diag Hid - S Bolter - JMC 380Documento11 páginasDiag Hid - S Bolter - JMC 38070238792Aún no hay calificaciones
- Mapa Conceptual Implementacion RseDocumento3 páginasMapa Conceptual Implementacion RseJOHANA VALLEAún no hay calificaciones