También podría gustarte
- Act. Alcanzar..Documento5 páginasAct. Alcanzar..Leilani García FerrerAún no hay calificaciones
- MTM2Documento4 páginasMTM2Jon HermozaAún no hay calificaciones
- ErgEstTra13TIePre 2022 MarDocumento34 páginasErgEstTra13TIePre 2022 MarVanessa KateryneAún no hay calificaciones
- Ejercicios MostDocumento10 páginasEjercicios MostAngela FloresAún no hay calificaciones
- Tablas Singer Licencia MTM 2Documento34 páginasTablas Singer Licencia MTM 2Carlos Fredy EcheverríaAún no hay calificaciones
- Resumen MTMDocumento6 páginasResumen MTMMario FloresAún no hay calificaciones
- Libro Valoracion - Protocolo 400 Puntos PDFDocumento22 páginasLibro Valoracion - Protocolo 400 Puntos PDFFlorencia CampañaAún no hay calificaciones
- 3 Alcanzar Un Remache Pequeño Que Esta Solo Sobre La Mesa, Longitud de Movimiento: 26 CM R26D 13.0Documento8 páginas3 Alcanzar Un Remache Pequeño Que Esta Solo Sobre La Mesa, Longitud de Movimiento: 26 CM R26D 13.0Wilmer GVAún no hay calificaciones
- Cuantificacion de MaterialesDocumento2 páginasCuantificacion de MaterialesCamarena Díaz Jorge RobertoAún no hay calificaciones
- Ejercicio 1Documento2 páginasEjercicio 1Cruz Emmanuel Colchado SampabloAún no hay calificaciones
- Micromovimiento MOVER TOMARDocumento21 páginasMicromovimiento MOVER TOMARPech Maldonado Eduardo AlejandroAún no hay calificaciones
- Video Sesion 5 - 6-10 de Septiembre - PlanimetriaDocumento27 páginasVideo Sesion 5 - 6-10 de Septiembre - PlanimetriaAlan CruzAún no hay calificaciones
- Actividades y Subactividades de BasicMOSTDocumento1 páginaActividades y Subactividades de BasicMOSTsergioutmAún no hay calificaciones
- MODAPSDocumento8 páginasMODAPSAna Karen Calamani FloresAún no hay calificaciones
- Uni1 TiemposPredeterminados 32020Documento16 páginasUni1 TiemposPredeterminados 32020Rafael VazquezAún no hay calificaciones
- Apuntes de MTMDocumento46 páginasApuntes de MTMGii'o ArandaAún no hay calificaciones
- Teodolito Topcon DTDocumento6 páginasTeodolito Topcon DTLuis Fernando UrrutiaAún no hay calificaciones
- Descripción Del Método MTMDocumento6 páginasDescripción Del Método MTMJosue Guillen ZavalaAún no hay calificaciones
- Nom036 ErgonomiaDocumento13 páginasNom036 ErgonomiaJiovana100% (2)
- 03 - Plano Inclinado PDFDocumento4 páginas03 - Plano Inclinado PDFHelen GaleanoAún no hay calificaciones
- Resumen Deformacion TorsionDocumento2 páginasResumen Deformacion TorsionJair Santiago Ramirez QuintanaAún no hay calificaciones
- Diagrama BimanualDocumento8 páginasDiagrama BimanualSaul CamargoAún no hay calificaciones
- Ejercicios Movimiento 1Documento6 páginasEjercicios Movimiento 1Gustavo LauraAún no hay calificaciones
- Laboratorio Calificado 01 v2-2 DDDocumento3 páginasLaboratorio Calificado 01 v2-2 DDCarlos SotoAún no hay calificaciones
- Tabla IDocumento20 páginasTabla IJonathan FloresAún no hay calificaciones
- Movimiento Compuesto EditDocumento5 páginasMovimiento Compuesto EditDIEGO EDUARDO UMAYASI CONDORIAún no hay calificaciones
- Alcanzar Ing Trabajo ExpoDocumento12 páginasAlcanzar Ing Trabajo ExpoGrace Miguel AlvarezAún no hay calificaciones
- Sesión 02 Manipulación Manual de CargaDocumento4 páginasSesión 02 Manipulación Manual de CargaMarcoAntonioYanquiYarangaAún no hay calificaciones
- Diagrama Bimanual 1-5Documento6 páginasDiagrama Bimanual 1-5Kevin GarcíaAún no hay calificaciones
- Most FLCSMDocumento2 páginasMost FLCSMthania alvarezAún no hay calificaciones
- Repaso de VolumenDocumento3 páginasRepaso de VolumenLucero González SandovalAún no hay calificaciones
- Hablemos de Calibracion Micrometros - OriginalDocumento15 páginasHablemos de Calibracion Micrometros - OriginalluisAún no hay calificaciones
- Practica 6 Diagrama Bimanual Grupo 15Documento12 páginasPractica 6 Diagrama Bimanual Grupo 15francoAún no hay calificaciones
- Deslizadores en GeogebraDocumento12 páginasDeslizadores en Geogebraetxeberri1Aún no hay calificaciones
- Cinemática Primero y Segundo Intelectus 2023Documento6 páginasCinemática Primero y Segundo Intelectus 2023فرديناند تعبر شيروكAún no hay calificaciones
- Ejercicios MTM TABLA XVDocumento6 páginasEjercicios MTM TABLA XVfer yaAún no hay calificaciones
- La Secuencia de Mover ControladoDocumento9 páginasLa Secuencia de Mover ControladoAnonymous EP1mmAAún no hay calificaciones
- La Secuencia de Mover ControladoDocumento9 páginasLa Secuencia de Mover ControladoMarco Perez MendozaAún no hay calificaciones
- Trabajo de FuncionesDocumento5 páginasTrabajo de FuncionesClaudia Gonzalez DuranAún no hay calificaciones
- Mc3baltiplos y Submc3baltiplos Del MetroDocumento18 páginasMc3baltiplos y Submc3baltiplos Del MetroPaola Edblen Armijo GutierrezAún no hay calificaciones
- Ejercicios Movimiento 1Documento6 páginasEjercicios Movimiento 1cinthia garciaAún no hay calificaciones
- Experimento No3Documento3 páginasExperimento No3Sergio Velasquez ArgomedoAún no hay calificaciones
- Lab2 GRUPO5-1Documento12 páginasLab2 GRUPO5-1Mariana PinedaAún no hay calificaciones
- Laborat Densidad 9Documento10 páginasLaborat Densidad 9Leonardo MuñozAún no hay calificaciones
- Corte Directo en Discontinuidad en Muestras de RocaDocumento19 páginasCorte Directo en Discontinuidad en Muestras de RocaRey AngekAún no hay calificaciones
- Ejercicios Mecanismos Final PDFDocumento30 páginasEjercicios Mecanismos Final PDFPablo Martin Cadena100% (1)
- Economía FI Cursado 2022 - Clase 3 (Caja de Edgeworth)Documento12 páginasEconomía FI Cursado 2022 - Clase 3 (Caja de Edgeworth)elias fuchs herreraAún no hay calificaciones
- Lectura de MediciónDocumento2 páginasLectura de Mediciónmodoprueba94Aún no hay calificaciones
- Fdocuments - Ec Ejercicios de Tiempos Predeteminados MTMDocumento5 páginasFdocuments - Ec Ejercicios de Tiempos Predeteminados MTMdan saul santos ramirezAún no hay calificaciones
- Ejemplo de Diagrama BimanualDocumento4 páginasEjemplo de Diagrama BimanualSebastikos HdmAún no hay calificaciones
- F Sem5Documento8 páginasF Sem5Jose Edson MillaAún no hay calificaciones
- Física Sem5Documento8 páginasFísica Sem5Melissa D. PooreAún no hay calificaciones
- Ejercicios Mecanismos PalancasDocumento6 páginasEjercicios Mecanismos Palancasნიკოლოზ ღამბარაშვილიAún no hay calificaciones
- F Sem5Documento8 páginasF Sem5Jose Edson MillaAún no hay calificaciones
- Apuntes Unidad 1-Parte 2 - Ttes01Documento58 páginasApuntes Unidad 1-Parte 2 - Ttes01lonchito74Aún no hay calificaciones
- Hojas de OperacionDocumento4 páginasHojas de OperacionDaniel SaenzAún no hay calificaciones
- Tiro Oblicuo. Manual AsimovDocumento26 páginasTiro Oblicuo. Manual AsimovNicolás GracianoAún no hay calificaciones
- Instrumentos de Mediciónmicrometro1Documento12 páginasInstrumentos de Mediciónmicrometro1javiercastrillon100% (8)
- Proyecto FinalDocumento30 páginasProyecto FinalDANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Viscosidad de Gases. Ejemplos 1Documento8 páginasViscosidad de Gases. Ejemplos 1DANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Ejercicio 2 Energia Por XDocumento1 páginaEjercicio 2 Energia Por XDANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Unidad 1Documento10 páginasUnidad 1DANIEL HUMBERTO AGUILAR BARRADAS100% (1)
- Diseño y Análisis de Experimentos (Antología) - V-2-19Documento58 páginasDiseño y Análisis de Experimentos (Antología) - V-2-19DANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- TecNM GA PR 09 02Documento1 páginaTecNM GA PR 09 02DANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Cuestionario IiiDocumento2 páginasCuestionario IiiDANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Cuestionario IDocumento2 páginasCuestionario IDANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Formato de Plan de Seguimiento y Medición de Características Clave TecNM-EN-PR-01-06Documento4 páginasFormato de Plan de Seguimiento y Medición de Características Clave TecNM-EN-PR-01-06DANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Cuestionario IiDocumento2 páginasCuestionario IiDANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Ecuación de Riccati: Dy DX X y X Y+r (X) U (X) y U+ 1 V VDocumento5 páginasEcuación de Riccati: Dy DX X y X Y+r (X) U (X) y U+ 1 V VDANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Diseño y Análisis de Experimentos (Antología)Documento41 páginasDiseño y Análisis de Experimentos (Antología)DANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Diagramas para Comprender Los Procesos QuímicosDocumento4 páginasDiagramas para Comprender Los Procesos QuímicosDANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Metodología de Analisis de RiesgoDocumento32 páginasMetodología de Analisis de RiesgoDANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Anteproyeco - Daniel AguilarDocumento11 páginasAnteproyeco - Daniel AguilarDANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Cuestionario IvDocumento6 páginasCuestionario IvDANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Diseño y Análisis de Experimentos (Manual de Prácticas)Documento22 páginasDiseño y Análisis de Experimentos (Manual de Prácticas)DANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Compendio NOMsDocumento20 páginasCompendio NOMsDANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Tarea 1Documento9 páginasTarea 1DANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Aplicación de La Ergonomía Ocupacional Del Área de TrabajoDocumento11 páginasAplicación de La Ergonomía Ocupacional Del Área de TrabajoDANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Primera Unidad FisicaDocumento44 páginasPrimera Unidad FisicaDANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Proceso OptimizadoDocumento20 páginasProceso OptimizadoDANIEL HUMBERTO AGUILAR BARRADASAún no hay calificaciones
- Hyrax y HassDocumento28 páginasHyrax y HassMery Joseph50% (2)
- SST-PR-14 Procedimiento para Manejo de PlumaDocumento4 páginasSST-PR-14 Procedimiento para Manejo de Plumajulio RiveraAún no hay calificaciones
- Experimento #2Documento11 páginasExperimento #2JuanC27Aún no hay calificaciones
- Brochure Bandejas Malla (Actualizado)Documento8 páginasBrochure Bandejas Malla (Actualizado)Heymar ancisar Murcia fuentesAún no hay calificaciones
- Caliplac-Paneles 2018Documento2 páginasCaliplac-Paneles 2018Laura MoreAún no hay calificaciones
- Tecnología de Extrusión en Alimentos. Ciencia y Tecnología de AlDocumento10 páginasTecnología de Extrusión en Alimentos. Ciencia y Tecnología de AlYUCUNDO MENDOZA TOLENTINOAún no hay calificaciones
- MantenimientoManual Kimco Xcinting 500rDocumento4 páginasMantenimientoManual Kimco Xcinting 500rRuben LazaroAún no hay calificaciones
- Elementos de Unión DesmontableDocumento41 páginasElementos de Unión DesmontableWILBER GROVER HERRERA ALACAAún no hay calificaciones
- Calibración Miguel Angel Valvula de ControlhDocumento2 páginasCalibración Miguel Angel Valvula de ControlhMiguel Angel Diaz GuzmanAún no hay calificaciones
- RoscasDocumento13 páginasRoscasRobbinson CastroAún no hay calificaciones
- Limado Rayado y GraneteadoDocumento7 páginasLimado Rayado y GraneteadoGabriel BarriosAún no hay calificaciones
- Manual de Motosierra Husqvarna PDFDocumento44 páginasManual de Motosierra Husqvarna PDFJason Martin100% (5)
- 002-004 Cabeza de CilindrosDocumento48 páginas002-004 Cabeza de CilindrosDavid Apaza Hurtado100% (1)
- Toma de Datos CalderaDocumento20 páginasToma de Datos CalderaMariosaladoAún no hay calificaciones
- ALICATEDocumento3 páginasALICATEArmando HarrisAún no hay calificaciones
- Rueda Vagoneta1Documento2 páginasRueda Vagoneta1Streik007Aún no hay calificaciones
- Proyecto Final de MantenimientoDocumento46 páginasProyecto Final de MantenimientoJairo RobertoAún no hay calificaciones
- Manual de Instalacion 6260-6261-F - A (FGLD240-4)Documento114 páginasManual de Instalacion 6260-6261-F - A (FGLD240-4)Martin Raynoldi GutierrezAún no hay calificaciones
- Medición, Verificación y Tolerancia de Roscas y EngranesDocumento13 páginasMedición, Verificación y Tolerancia de Roscas y EngranesKen RamirezAún no hay calificaciones
- Sistemas Constructivo en Seco EternitDocumento103 páginasSistemas Constructivo en Seco EternitdnycsarAún no hay calificaciones
- Cubierta MetalicaDocumento23 páginasCubierta MetalicatatidkAún no hay calificaciones
- AnclajefinalDocumento38 páginasAnclajefinalLuz Valdez100% (1)
- d2 ZF Apls600 EspDocumento49 páginasd2 ZF Apls600 EspManuel Urbina Vásquez50% (2)
- 1° Informe Elementos de Maquinas TextilesDocumento6 páginas1° Informe Elementos de Maquinas TextilesEmilio Coaquira ChambiAún no hay calificaciones
- CBP SSMA EST 011 Herramientas ManualesDocumento6 páginasCBP SSMA EST 011 Herramientas ManualesE. Ricardo Ponce EspejoAún no hay calificaciones
- Engrapadora Diseño Pieza 2Documento22 páginasEngrapadora Diseño Pieza 2adrian chavAún no hay calificaciones
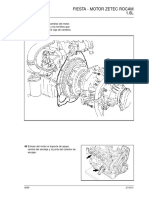
- Fiesta - Motor Zetec Rocam 1.6L: - Retirar Las Tuercas y Los Tornillos Que Sujetan El Motor A La Caja de CambiosDocumento40 páginasFiesta - Motor Zetec Rocam 1.6L: - Retirar Las Tuercas y Los Tornillos Que Sujetan El Motor A La Caja de CambiosVictor SanchezAún no hay calificaciones
- Resumen de Montaje de Estructuras de AceroDocumento39 páginasResumen de Montaje de Estructuras de AceroeusebioAún no hay calificaciones
- Transportadores Helicoidales IntroduccionDocumento2 páginasTransportadores Helicoidales IntroduccionJesus Antonio Gomez50% (2)
- ZINGUERIADocumento8 páginasZINGUERIAalfredofederico100% (1)
- UF0565 - Eficiencia energética en las instalaciones de calefacción y ACS en los edificiosDe EverandUF0565 - Eficiencia energética en las instalaciones de calefacción y ACS en los edificiosAún no hay calificaciones
- Manual de combustibles alternativos y tecnología automotrizDe EverandManual de combustibles alternativos y tecnología automotrizCalificación: 5 de 5 estrellas5/5 (6)
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Flujo de fluidos e intercambio de calorDe EverandFlujo de fluidos e intercambio de calorCalificación: 1 de 5 estrellas1/5 (1)
- UF1026 - Caracterización de procesos e instalaciones frigoríficasDe EverandUF1026 - Caracterización de procesos e instalaciones frigoríficasCalificación: 4 de 5 estrellas4/5 (1)
- MF0624_1 - Técnicas básicas de electricidad de vehículosDe EverandMF0624_1 - Técnicas básicas de electricidad de vehículosCalificación: 5 de 5 estrellas5/5 (2)
- UF0009 - Mantenimiento, preparación y manejo de tractoresDe EverandUF0009 - Mantenimiento, preparación y manejo de tractoresAún no hay calificaciones
- MF1165_3 - Instalaciones de ventilación-ExtracciónDe EverandMF1165_3 - Instalaciones de ventilación-ExtracciónAún no hay calificaciones
- El método de los elementos finitos: Un enfoque teórico prácticoDe EverandEl método de los elementos finitos: Un enfoque teórico prácticoCalificación: 3 de 5 estrellas3/5 (4)
- Manual técnico de refrigerantesDe EverandManual técnico de refrigerantesCalificación: 4 de 5 estrellas4/5 (4)
- El arte de hacer cuchillos (Bladesmithing) para principiantes: Haga su primer cuchillo en 7 pasos [Spanish Version]De EverandEl arte de hacer cuchillos (Bladesmithing) para principiantes: Haga su primer cuchillo en 7 pasos [Spanish Version]Calificación: 3 de 5 estrellas3/5 (2)
- UF1213 - Técnicas de mecanizado y metrologíaDe EverandUF1213 - Técnicas de mecanizado y metrologíaCalificación: 4 de 5 estrellas4/5 (5)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- GuíaBurros Comprar un coche eléctrico: Todo lo que debes saber sobre los coches eléctricosDe EverandGuíaBurros Comprar un coche eléctrico: Todo lo que debes saber sobre los coches eléctricosCalificación: 5 de 5 estrellas5/5 (2)
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoDe EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoCalificación: 4 de 5 estrellas4/5 (4)
- MF1461_2 - Mantenimiento de primer nivel de vehículos de transporte por carreteraDe EverandMF1461_2 - Mantenimiento de primer nivel de vehículos de transporte por carreteraCalificación: 4 de 5 estrellas4/5 (2)
- Casos de estudio de termodinámica: Solución mediante el uso de ASPENHYSYSDe EverandCasos de estudio de termodinámica: Solución mediante el uso de ASPENHYSYSCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Diseño de vigas y muros en mamposteria reforzadaDe EverandDiseño de vigas y muros en mamposteria reforzadaCalificación: 3.5 de 5 estrellas3.5/5 (2)
- Mecánica para ingenieros: cinemática: Apuntes de preparación de clasesDe EverandMecánica para ingenieros: cinemática: Apuntes de preparación de clasesAún no hay calificaciones
- UF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposDe EverandUF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposCalificación: 5 de 5 estrellas5/5 (1)
- UF0471 - Conducción y circulación de vehículos de transporte urbano e interurbano por vías públicasDe EverandUF0471 - Conducción y circulación de vehículos de transporte urbano e interurbano por vías públicasAún no hay calificaciones
- UF0902 - Caracterización de instalaciones de climatizaciónDe EverandUF0902 - Caracterización de instalaciones de climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- Mucho más que una Cruz: Imágenes de la Salvación para diversos contextosDe EverandMucho más que una Cruz: Imágenes de la Salvación para diversos contextosCalificación: 3.5 de 5 estrellas3.5/5 (3)
- Mecánica del medio continuo: una iniciaciónDe EverandMecánica del medio continuo: una iniciaciónCalificación: 3 de 5 estrellas3/5 (1)























































































































![El arte de hacer cuchillos (Bladesmithing) para principiantes: Haga su primer cuchillo en 7 pasos [Spanish Version]](https://imgv2-2-f.scribdassets.com/img/word_document/436374717/149x198/1f8b752e12/1699199921?v=1)