También podría gustarte
- Taller Primer Parcial 202330Documento5 páginasTaller Primer Parcial 202330Camilo San JuanAún no hay calificaciones
- Control Motor de PulidoDocumento6 páginasControl Motor de PulidoSebastian Rojas OrtizAún no hay calificaciones
- Informe de Motor DC TranferenciaDocumento12 páginasInforme de Motor DC Tranferenciaedison cedeñoAún no hay calificaciones
- Función de Transferencia de Un Motor de CDDocumento8 páginasFunción de Transferencia de Un Motor de CDAbel Nohpal BrionesAún no hay calificaciones
- # 1 Modelado MatemáticoDocumento33 páginas# 1 Modelado MatemáticoSamuel Granados MejíaAún no hay calificaciones
- Asignacion 4Documento14 páginasAsignacion 4CRISTHIAN SANTOS FLORES LUQUEAún no hay calificaciones
- Trabajo Autónomo 3. Modelado de Sistemas Mecánicos IIDocumento5 páginasTrabajo Autónomo 3. Modelado de Sistemas Mecánicos IIvanessaAún no hay calificaciones
- Laboratorio6 - Diseño - Control PIDDocumento29 páginasLaboratorio6 - Diseño - Control PIDWilson MorochoAún no hay calificaciones
- Proyecto InstruDocumento5 páginasProyecto InstruMario GomezAún no hay calificaciones
- Modelo MotorDocumento13 páginasModelo MotorVivivianaAún no hay calificaciones
- Diseño de Reactores No IsotermicosDocumento32 páginasDiseño de Reactores No IsotermicosKevinEricksonSilvaIsidroAún no hay calificaciones
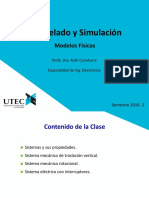
- Clase Modelos FísicosDocumento24 páginasClase Modelos FísicosJose Luis Alejandro Munoz ZevallosAún no hay calificaciones
- Modelo Dinámico de Sistemas Mediante La Ecuación de Lagrange - FinalDocumento27 páginasModelo Dinámico de Sistemas Mediante La Ecuación de Lagrange - FinalTyronAún no hay calificaciones
- Guía N°4 - Matlab - SHN115Documento11 páginasGuía N°4 - Matlab - SHN115Ricardo MartinezAún no hay calificaciones
- Laboratorio7 Diseño Control Adelanto FaseDocumento14 páginasLaboratorio7 Diseño Control Adelanto FaseDanyels GvAún no hay calificaciones
- Prev.3 Ing - Control 1609A Guzman Alcantara Miguel GonzaloDocumento9 páginasPrev.3 Ing - Control 1609A Guzman Alcantara Miguel GonzaloRafael Garcia IbarraAún no hay calificaciones
- Modelado de MotorDocumento11 páginasModelado de MotorJose AguilarAún no hay calificaciones
- Integral de DuhamelDocumento14 páginasIntegral de DuhamelAlex Guerrero CelmiAún no hay calificaciones
- Sustentacion Final Trabajo ColaborativoDocumento8 páginasSustentacion Final Trabajo ColaborativosantosAún no hay calificaciones
- Practica #1 Automatizacion IndustrialDocumento9 páginasPractica #1 Automatizacion Industrialpebeltran_01Aún no hay calificaciones
- Proyecto Reacciones Serie-Paralelo Equipo 7Documento8 páginasProyecto Reacciones Serie-Paralelo Equipo 7juankiak1Aún no hay calificaciones
- Sistema de Control de Posición Acimutal de Una AntenaDocumento11 páginasSistema de Control de Posición Acimutal de Una AntenaestebanAún no hay calificaciones
- Laboratorio 2.1 Ope 1Documento11 páginasLaboratorio 2.1 Ope 1BRAHIAN STEVEN PEREZ ARAGONAún no hay calificaciones
- Ecin U1 Ea RiscDocumento10 páginasEcin U1 Ea RiscRicardo Segovia CastellanoAún no hay calificaciones
- Modelo Matemático de Un AmortiguadorDocumento10 páginasModelo Matemático de Un Amortiguadorcarlo100% (2)
- Morocho-Sanchez Practica 7Documento13 páginasMorocho-Sanchez Practica 7Wilson MorochoAún no hay calificaciones
- Tarea3 JeffersonDocumento10 páginasTarea3 JeffersonJefferson Portilla MayorAún no hay calificaciones
- Tema 1 GuionDocumento5 páginasTema 1 GuionCelia Rios GilAún no hay calificaciones
- Tarea4 Grupo 41Documento14 páginasTarea4 Grupo 41DEIBY DIAZAún no hay calificaciones
- Laboratorio - 7Documento3 páginasLaboratorio - 7Fernando BatistaAún no hay calificaciones
- Analisis Dimensional y Semejanza 1Documento15 páginasAnalisis Dimensional y Semejanza 1Jhan Alexis LlanosAún no hay calificaciones
- Función de Transferencia de Un MotordcDocumento9 páginasFunción de Transferencia de Un MotordcEmanuel Flores100% (1)
- AyCP Ejercicios Tema1 SOLUCIONES 2020Documento18 páginasAyCP Ejercicios Tema1 SOLUCIONES 2020peposasunaAún no hay calificaciones
- Tarea 1 Grupo2 Modelos MatematicosDocumento6 páginasTarea 1 Grupo2 Modelos MatematicosGustavo TomalaAún no hay calificaciones
- Catálogo 1 Sistema Masa-Resorte-AmortiguadorDocumento27 páginasCatálogo 1 Sistema Masa-Resorte-AmortiguadorEdmundo Rivera Veras91% (11)
- Tarea 4 Grupo 9 PDFDocumento6 páginasTarea 4 Grupo 9 PDFhoolmanAún no hay calificaciones
- Energía Undimotriz Tesis España PDFDocumento137 páginasEnergía Undimotriz Tesis España PDFMaria EugeniaAún no hay calificaciones
- 4 Transf Lineal 2021Documento4 páginas4 Transf Lineal 2021Monica Isabel VeneciaAún no hay calificaciones
- Extrapolación de Richardson PDFDocumento5 páginasExtrapolación de Richardson PDFANDRES FELIPE CARDOZO CASTILLOAún no hay calificaciones
- C03, Modelamiento Matematico de Sistemas DinamicosDocumento13 páginasC03, Modelamiento Matematico de Sistemas DinamicosPIERO ALDO SIMBRON SANCHEZAún no hay calificaciones
- Laboratorio - Oscilaciones ForzadasDocumento2 páginasLaboratorio - Oscilaciones ForzadasNanfer PereaAún no hay calificaciones
- Longitud de Arco Curvatura y TorsionDocumento10 páginasLongitud de Arco Curvatura y TorsionRey Esteban MisterioAún no hay calificaciones
- Spira MirabilisDocumento6 páginasSpira MirabilisAbelardo Perez RodriguezAún no hay calificaciones
- LABM2Documento7 páginasLABM2EDGAR ANDRES SANGOQUIZA QUINGAAún no hay calificaciones
- Laboratorio #3 Movimiento ForzadoDocumento27 páginasLaboratorio #3 Movimiento ForzadoPaula0% (1)
- Reporte No 9. ColisionesDocumento16 páginasReporte No 9. ColisionesAlex glezAún no hay calificaciones
- Fun Transf Sistema Masa ResorteDocumento1 páginaFun Transf Sistema Masa ResorteYUCRA SILVESTRE JOSE DENNISAún no hay calificaciones
- Laboratorio DirigidoDocumento9 páginasLaboratorio DirigidoEstebanAún no hay calificaciones
- Examen Robotica Unidad3Documento10 páginasExamen Robotica Unidad3alejandrocamposgarcia777Aún no hay calificaciones
- Actividades Previas Practica 1Documento4 páginasActividades Previas Practica 1Carlos PerezAún no hay calificaciones
- Mate Avanzada 3.8Documento9 páginasMate Avanzada 3.8danielAún no hay calificaciones
- Análisis de Pequeña Señal Sensitividad Factor de ParticipacionDocumento5 páginasAnálisis de Pequeña Señal Sensitividad Factor de ParticipacionDani Tapia100% (1)
- Lab, Control PDFDocumento2 páginasLab, Control PDFjair eduardo mendez gonzalesAún no hay calificaciones
- CursoMIMO Clase10-ControlabilidadObservabilidad P2Documento8 páginasCursoMIMO Clase10-ControlabilidadObservabilidad P2Juan Andrés Caballero MartínezAún no hay calificaciones
- Entrega Tarea 3 IRHDocumento17 páginasEntrega Tarea 3 IRHfernando orosAún no hay calificaciones
- Aporte Yurley Florez GDocumento4 páginasAporte Yurley Florez GFabian AponteAún no hay calificaciones
- Evaluativo 20% Control AutomaticoDocumento6 páginasEvaluativo 20% Control AutomaticoEmmanuel MéndezAún no hay calificaciones
- ComunicacionesDocumento7 páginasComunicacionesvanessaAún no hay calificaciones
- Actuadores EléctricosDocumento37 páginasActuadores EléctricosvanessaAún no hay calificaciones
- Puente de WheatsoneDocumento7 páginasPuente de WheatsonevanessaAún no hay calificaciones
- Tarea 1.2 - Polarización Del JFETDocumento4 páginasTarea 1.2 - Polarización Del JFETvanessaAún no hay calificaciones
- Evaluación 1. Modelado de Sistemas MecánicosDocumento6 páginasEvaluación 1. Modelado de Sistemas MecánicosvanessaAún no hay calificaciones
- Trabajo Autónomo 3. Modelado de Sistemas Mecánicos IIDocumento5 páginasTrabajo Autónomo 3. Modelado de Sistemas Mecánicos IIvanessaAún no hay calificaciones
- Trabajo Autónomo 4. Modelado de Sistemas EléctricosDocumento2 páginasTrabajo Autónomo 4. Modelado de Sistemas EléctricosvanessaAún no hay calificaciones
- Trabajo Autónomo 1. Señales de PruebaDocumento8 páginasTrabajo Autónomo 1. Señales de PruebavanessaAún no hay calificaciones
- Proyecto ServimantDocumento67 páginasProyecto ServimantvanessaAún no hay calificaciones
- Tarea 2 Seguridad ElectricaDocumento5 páginasTarea 2 Seguridad ElectricaCasiopeazul100% (2)
- Es Normal Que en La Adolescencia Se Prueben Distintas Maneras de VestirDocumento21 páginasEs Normal Que en La Adolescencia Se Prueben Distintas Maneras de VestirmarisolAún no hay calificaciones
- Circuitos LogicosDocumento9 páginasCircuitos LogicosSandarkGgAún no hay calificaciones
- Dorstenia Brasiliensis Lam. (Moraceae) : Caracterización Morfoanatómica de Una Especie Polimórfica, Empleada Con Fines Medicinales en Paraguay.Documento10 páginasDorstenia Brasiliensis Lam. (Moraceae) : Caracterización Morfoanatómica de Una Especie Polimórfica, Empleada Con Fines Medicinales en Paraguay.Journal of Pharmacy & Pharmacognosy ResearchAún no hay calificaciones
- Guía de Formulación InórganicaDocumento37 páginasGuía de Formulación InórganicaFellixRafaelAlvaradoAún no hay calificaciones
- Matriz de Riesgos GTC-45Documento92 páginasMatriz de Riesgos GTC-45EMPRESA INVATAMAún no hay calificaciones
- Apego Seguro 2023Documento13 páginasApego Seguro 2023rios leivaAún no hay calificaciones
- Plan de Movilización Regional Por Las MatemáticasDocumento8 páginasPlan de Movilización Regional Por Las Matemáticasjimmy severino100% (1)
- Qué Son Los NúmerosDocumento6 páginasQué Son Los NúmerosMarianelaAún no hay calificaciones
- Informe Investigación FormativaDocumento14 páginasInforme Investigación FormativaJeferson SegundoAún no hay calificaciones
- Potenciales EvocadosDocumento7 páginasPotenciales Evocadoshebe1985Aún no hay calificaciones
- Informe de Extraccion de ADNDocumento17 páginasInforme de Extraccion de ADNKadeem KatitoAún no hay calificaciones
- Trabajo Práctico FinalDocumento3 páginasTrabajo Práctico Finaljavier carlos parraga tamoAún no hay calificaciones
- 5 Guia EducativaDocumento59 páginas5 Guia EducativaAriel ACAún no hay calificaciones
- U4 Act 2 Técnicas Marín Carbajal Luis ArhamDocumento3 páginasU4 Act 2 Técnicas Marín Carbajal Luis ArhamLuis Arham Marin CarbajalAún no hay calificaciones
- Para Fotoc Uni y PluricelularesDocumento1 páginaPara Fotoc Uni y PluricelularesRomina PonceAún no hay calificaciones
- Planificación de Continuidad Pedagógica Rimas y EjerciciosDocumento2 páginasPlanificación de Continuidad Pedagógica Rimas y EjerciciosAldana Mariela CiriglianoAún no hay calificaciones
- SESIÓN Utilizamos Adjetivos para DescribirDocumento5 páginasSESIÓN Utilizamos Adjetivos para DescribirMartha Yrene Sevilla Flores100% (2)
- Documento para Sustentar Momento de VerdadDocumento2 páginasDocumento para Sustentar Momento de VerdadSHASKYA ROMERO SANTISAún no hay calificaciones
- Cuaderno de Trabajo Ética1°SEC. 2022Documento20 páginasCuaderno de Trabajo Ética1°SEC. 2022BlackRaven2311Aún no hay calificaciones
- GUÍA DE APRENDIZAJE LENGUAJE Y COMUNICACIÓN 5° GrineldoDocumento3 páginasGUÍA DE APRENDIZAJE LENGUAJE Y COMUNICACIÓN 5° GrineldonathaliemiliaAún no hay calificaciones
- Ubicacion Pueblo Libre Sap-1. A3 Ubic.y Local.Documento1 páginaUbicacion Pueblo Libre Sap-1. A3 Ubic.y Local.jhonatan gutierrez ayalaAún no hay calificaciones
- Libro de Actividades 5to Grado Multiplos y DivisoresDocumento2 páginasLibro de Actividades 5to Grado Multiplos y DivisoresendermeleanAún no hay calificaciones
- PLANOSDocumento8 páginasPLANOSLuiyi Antonio BonillaAún no hay calificaciones
- Diptico Del Calentamiento GlobalDocumento2 páginasDiptico Del Calentamiento GlobalNikol Gutierrez chumbiAún no hay calificaciones
- Berenjena 1Documento7 páginasBerenjena 1Javier LópezAún no hay calificaciones
- Inv E-740-13Documento4 páginasInv E-740-13Jorge Hernán Flórez GálvezAún no hay calificaciones
- 1223333Documento1 página1223333Via SajaAún no hay calificaciones
- Robert Dilts - Patrones Cognitivos de Jesus of NazarethDocumento105 páginasRobert Dilts - Patrones Cognitivos de Jesus of NazarethChocolatozo100% (2)
- Actividad 5 ResilienciaDocumento14 páginasActividad 5 ResilienciaCristian NiñoAún no hay calificaciones
- La revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaDe EverandLa revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaCalificación: 5 de 5 estrellas5/5 (202)
- Zensorialmente : Dejá que tu cuerpo sea tu cerebroDe EverandZensorialmente : Dejá que tu cuerpo sea tu cerebroAún no hay calificaciones
- La metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceDe EverandLa metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceCalificación: 5 de 5 estrellas5/5 (8)
- Homo antecessor: El nacimiento de una especieDe EverandHomo antecessor: El nacimiento de una especieCalificación: 5 de 5 estrellas5/5 (1)
- Disciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreDe EverandDisciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreCalificación: 5 de 5 estrellas5/5 (3)
- Las Cinco Leyes Biológicas De La Naturaleza: La Nueva Medicina (Color Edition) SpanishDe EverandLas Cinco Leyes Biológicas De La Naturaleza: La Nueva Medicina (Color Edition) SpanishCalificación: 4.5 de 5 estrellas4.5/5 (3)
- Batidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoDe EverandBatidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoCalificación: 5 de 5 estrellas5/5 (2)
- El péndulo de sanación: Péndulo hebreo. Investigación y sistematización de la técnicaDe EverandEl péndulo de sanación: Péndulo hebreo. Investigación y sistematización de la técnicaCalificación: 4.5 de 5 estrellas4.5/5 (27)
- La vibración de las ondas cerebrales: Recuperar el ritmo de una vida saludable y felizDe EverandLa vibración de las ondas cerebrales: Recuperar el ritmo de una vida saludable y felizCalificación: 5 de 5 estrellas5/5 (7)
- 50 técnicas de mindfulness para la ansiedad, la depresión, el estrés y el dolor: Mindfulness como terapiaDe Everand50 técnicas de mindfulness para la ansiedad, la depresión, el estrés y el dolor: Mindfulness como terapiaCalificación: 4 de 5 estrellas4/5 (37)
- Sistema nervioso y osteopatía: Nervios periféricos, meninges craneales y espinales, y sistema nervioso vegetativo (Color)De EverandSistema nervioso y osteopatía: Nervios periféricos, meninges craneales y espinales, y sistema nervioso vegetativo (Color)Calificación: 5 de 5 estrellas5/5 (9)
- Anatomía & 100 estiramientos Esenciales (Color): Técnicas, beneficios, precauciones, consejos, tablas de series, dolenciasDe EverandAnatomía & 100 estiramientos Esenciales (Color): Técnicas, beneficios, precauciones, consejos, tablas de series, dolenciasCalificación: 4.5 de 5 estrellas4.5/5 (21)
- Magia con Bicarbonato de Sodio: Decenas de Remedios y Usos Caseros que te Ahorrarán Dinero y Tiempo Utilizando el Bicarbonato de SodioDe EverandMagia con Bicarbonato de Sodio: Decenas de Remedios y Usos Caseros que te Ahorrarán Dinero y Tiempo Utilizando el Bicarbonato de SodioCalificación: 4.5 de 5 estrellas4.5/5 (7)
- SNC - Soporte neurocrítico: De la urgencia a la terapia intensivaDe EverandSNC - Soporte neurocrítico: De la urgencia a la terapia intensivaAún no hay calificaciones
- Liberación del trauma: Perdón y temblor es el caminoDe EverandLiberación del trauma: Perdón y temblor es el caminoCalificación: 4 de 5 estrellas4/5 (4)
- El concepto Mulligan de terapia manual (Color)De EverandEl concepto Mulligan de terapia manual (Color)Calificación: 5 de 5 estrellas5/5 (3)
- Neurociencia para vencer la depresión: La esprial ascendenteDe EverandNeurociencia para vencer la depresión: La esprial ascendenteCalificación: 4.5 de 5 estrellas4.5/5 (10)
- Proyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadDe EverandProyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadCalificación: 5 de 5 estrellas5/5 (1)
- Los mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosDe EverandLos mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosCalificación: 5 de 5 estrellas5/5 (2)
- Ikigai: Los secretos orientales para la longevidad explicados con el cine y la cultura popDe EverandIkigai: Los secretos orientales para la longevidad explicados con el cine y la cultura popCalificación: 4 de 5 estrellas4/5 (5)
- Neuroanatomía: Fundamentos de neuroanatomía estructural, funcional y clínicaDe EverandNeuroanatomía: Fundamentos de neuroanatomía estructural, funcional y clínicaCalificación: 4 de 5 estrellas4/5 (16)