También podría gustarte
- Mis Proyectos Con ArduinoDocumento138 páginasMis Proyectos Con ArduinoAndrésMcGrathSánchez100% (5)
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDe EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasCalificación: 2.5 de 5 estrellas2.5/5 (3)
- DataWarehouse DataMarts ModelosDimensionales v2Documento37 páginasDataWarehouse DataMarts ModelosDimensionales v2PabloFernandez100% (2)
- Extraer Raws de RidibooksDocumento13 páginasExtraer Raws de RidibooksKii-chanAún no hay calificaciones
- Diagnóstico de averías y mantenimiento correctivo de sistemas domóticos e inmóticos. ELEM0111De EverandDiagnóstico de averías y mantenimiento correctivo de sistemas domóticos e inmóticos. ELEM0111Aún no hay calificaciones
- Testeo y verificación de equipos y periféricos microinformáticos. IFCT0108De EverandTesteo y verificación de equipos y periféricos microinformáticos. IFCT0108Aún no hay calificaciones
- Actividad Central Unidad 1 Diseño de Un Producto Electronico Con MicrocontroladoresDocumento3 páginasActividad Central Unidad 1 Diseño de Un Producto Electronico Con MicrocontroladoresCarolina Buitrago100% (8)
- Costos de Produccion de Papa Por HectareaDocumento2 páginasCostos de Produccion de Papa Por Hectareaedwin sipauccar saldivar100% (1)
- Reparación de instalaciones automatizadas. ELEE0109De EverandReparación de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- Laboratorio 7 PDFDocumento26 páginasLaboratorio 7 PDFGiancarlo Colca0% (1)
- Sistemas embebidos evoluciónDocumento10 páginasSistemas embebidos evoluciónAndrea1082Aún no hay calificaciones
- Iso 14001 - Molinos Inka S.A.Documento22 páginasIso 14001 - Molinos Inka S.A.JavierAún no hay calificaciones
- ABP2Documento19 páginasABP2FelipeAlfonsoMuñozMorenoAún no hay calificaciones
- Ajedrezy TEADocumento28 páginasAjedrezy TEADiego CabralAún no hay calificaciones
- Reporte de La Implementación de Un Sistema de Procesamiento de Señales Por Medio de Microcontrolador para Controlar El Sistema Mecatrónico PropuestoDocumento25 páginasReporte de La Implementación de Un Sistema de Procesamiento de Señales Por Medio de Microcontrolador para Controlar El Sistema Mecatrónico Propuestosincerely louisAún no hay calificaciones
- UntitledDocumento22 páginasUntitleddavid giraldo lopezAún no hay calificaciones
- Informe de Laboratorios sobre Microprocesadores y MicrocontroladoresDocumento38 páginasInforme de Laboratorios sobre Microprocesadores y MicrocontroladoresalexanderAún no hay calificaciones
- Informe 14Documento9 páginasInforme 14GEORGE STEVEN SALDA�A CARRANZAAún no hay calificaciones
- Integradora 2Documento21 páginasIntegradora 2Jesus Ivan Ramirez RosalesAún no hay calificaciones
- Act1 T4 VictorMendez 2BDocumento21 páginasAct1 T4 VictorMendez 2BAlonso MendezAún no hay calificaciones
- Práctica 1-Monitoreo y Ajuste de Parámetros Con Arduino y Matlab SimulinkDocumento12 páginasPráctica 1-Monitoreo y Ajuste de Parámetros Con Arduino y Matlab SimulinkIsrael GutiérrezAún no hay calificaciones
- Proyecto FinalDocumento11 páginasProyecto FinaltibanaboyacaAún no hay calificaciones
- MainDocumento17 páginasMainWalterTafur100% (1)
- Control de Motor Más Nube Utilización La Plataforma de Ubidots y Esp8266Documento8 páginasControl de Motor Más Nube Utilización La Plataforma de Ubidots y Esp8266Leo Valdez HernandezAún no hay calificaciones
- Reporte Taller 2 FINALDocumento13 páginasReporte Taller 2 FINALAlejandro MonroyAún no hay calificaciones
- Proyecto para Protocolos de ComunicacionDocumento4 páginasProyecto para Protocolos de Comunicacionmario gomez100% (1)
- Etapa 3 - Harver RamirezDocumento11 páginasEtapa 3 - Harver RamirezLeidy Johana Fontecha GalindoAún no hay calificaciones
- Circuitos Electricos Portafolio de EvidenciasDocumento10 páginasCircuitos Electricos Portafolio de EvidenciasAntonio HernandezAún no hay calificaciones
- Práctica N° 1 SD2Documento7 páginasPráctica N° 1 SD2alva_jraAún no hay calificaciones
- Sistemas Embebidos ATI EADocumento23 páginasSistemas Embebidos ATI EABryan SikSiAún no hay calificaciones
- CuestionarioNo3 EmbebidosDocumento10 páginasCuestionarioNo3 EmbebidosEdwin GuzmánAún no hay calificaciones
- INFORME GENERAL Del CircuitoDocumento8 páginasINFORME GENERAL Del CircuitoROMINA AUXILIADORA VARGAS GARCIAAún no hay calificaciones
- Avance Ing ControlDocumento14 páginasAvance Ing ControlROMEL VALQUI RAMIREZAún no hay calificaciones
- Practica 6 Instrumentacion-1Documento17 páginasPractica 6 Instrumentacion-1alan82aguilitaAún no hay calificaciones
- Practica 1Documento4 páginasPractica 1Daniel Fernando Camacho MoraAún no hay calificaciones
- Tarea 3 Cesar SanchezDocumento17 páginasTarea 3 Cesar Sanchezcesar sanchezAún no hay calificaciones
- TR1-MARCELO PEREZ JESUSDocumento10 páginasTR1-MARCELO PEREZ JESUSJesús MarceloAún no hay calificaciones
- Tallerdiseñode Un ProductoelectronicoDocumento14 páginasTallerdiseñode Un Productoelectronicoelkin bolivarAún no hay calificaciones
- Medidor de ángulo de fase y factor de potencia monofásicoDocumento9 páginasMedidor de ángulo de fase y factor de potencia monofásicoLil SeanAún no hay calificaciones
- Trabajo Instrumentación TerminadoDocumento15 páginasTrabajo Instrumentación TerminadoAlcides GuainaAún no hay calificaciones
- P1 OriolRuizVilarroya MimounOuhnaDocumento15 páginasP1 OriolRuizVilarroya MimounOuhnaCristian DazaAún no hay calificaciones
- Perfil EPS - Luis Emilio Ortiz Alvarez PDFDocumento6 páginasPerfil EPS - Luis Emilio Ortiz Alvarez PDFKevin López OrantesAún no hay calificaciones
- TermoparesDocumento2 páginasTermoparesJaime Andres Diaz MonroyAún no hay calificaciones
- TR2-MARCELO PEREZ JESUSDocumento14 páginasTR2-MARCELO PEREZ JESUSJesús MarceloAún no hay calificaciones
- Mano ArduinoDocumento8 páginasMano ArduinoEdgar PachecoAún no hay calificaciones
- Mantoelectr Lab02Documento27 páginasMantoelectr Lab02Jean CcAún no hay calificaciones
- Sistema Control Temperatura PID Arduino LabviewDocumento26 páginasSistema Control Temperatura PID Arduino Labviewjulio durandAún no hay calificaciones
- Etapa - 3 - Anguie - GarcésDocumento12 páginasEtapa - 3 - Anguie - GarcésJuanito JujujuAún no hay calificaciones
- Paper ControladoresDocumento5 páginasPaper ControladoresSantiago JiménezAún no hay calificaciones
- Tarjeta de Adquisicion de DatosDocumento10 páginasTarjeta de Adquisicion de DatosMario David Alvarez VallejoAún no hay calificaciones
- Reporte 3 6MTDocumento15 páginasReporte 3 6MTGustavo OrtizAún no hay calificaciones
- Reporte de Practica 2Documento7 páginasReporte de Practica 2JULIO CESAR BIBIANO GARCIAAún no hay calificaciones
- Proyecto IntegradorDocumento26 páginasProyecto IntegradorMiguel Angel Castillo PinzonAún no hay calificaciones
- Fase 4 Implementacion Del Proyecto FinalDocumento17 páginasFase 4 Implementacion Del Proyecto Finalvictor cardonaAún no hay calificaciones
- Trabajo Aplicativo de SISTEMAS DIGITALESDocumento17 páginasTrabajo Aplicativo de SISTEMAS DIGITALES2313010818Aún no hay calificaciones
- Practica de Laboratorio 1Documento11 páginasPractica de Laboratorio 1Ricardo BernalOoAún no hay calificaciones
- Examen FinalDocumento41 páginasExamen FinalJhylmar MamaniAún no hay calificaciones
- Etapa 4 Jose Marino Franco AlzateDocumento9 páginasEtapa 4 Jose Marino Franco AlzateJosé marino Franco AlzateAún no hay calificaciones
- Control PID y FUZZY de Una Planta de LuzDocumento10 páginasControl PID y FUZZY de Una Planta de LuzAndres SalasAún no hay calificaciones
- ITA58 Lab 4 CRJCDocumento22 páginasITA58 Lab 4 CRJCJuan CRAún no hay calificaciones
- Fase 3 Trabajo CompiladoDocumento12 páginasFase 3 Trabajo CompiladoDavid SalcedoAún no hay calificaciones
- Implementación de sistema de control de temperatura para incubadora mediante ArduinoDocumento19 páginasImplementación de sistema de control de temperatura para incubadora mediante ArduinoIvan Crispin PaucarAún no hay calificaciones
- Guia 3 DiseñoDocumento7 páginasGuia 3 DiseñoLeonardoAún no hay calificaciones
- Tarea Final Grupo 4 Jorge MendietaDocumento13 páginasTarea Final Grupo 4 Jorge MendietaSergioma Garocha100% (1)
- Sensor LM35 mide temperatura en ThingspeakDocumento9 páginasSensor LM35 mide temperatura en ThingspeakLeo Valdez HernandezAún no hay calificaciones
- Taller 1 TremofluidosDocumento9 páginasTaller 1 Tremofluidosmichael stiven moreno silgadoAún no hay calificaciones
- Primer Laboratorio de Electronica TerminadoDocumento9 páginasPrimer Laboratorio de Electronica Terminadomichael stiven moreno silgadoAún no hay calificaciones
- Solucion Taller de MatladDocumento11 páginasSolucion Taller de Matladmichael stiven moreno silgadoAún no hay calificaciones
- Solucion Taller 2 Michael Moreno 1010106793Documento8 páginasSolucion Taller 2 Michael Moreno 1010106793michael stiven moreno silgadoAún no hay calificaciones
- Laboratorio # 1 El Diodo Electronica 1Documento9 páginasLaboratorio # 1 El Diodo Electronica 1michael stiven moreno silgadoAún no hay calificaciones
- Laboratorio 3 de Electronica Cambiadores y Multiplicadores BorradorDocumento13 páginasLaboratorio 3 de Electronica Cambiadores y Multiplicadores Borradormichael stiven moreno silgadoAún no hay calificaciones
- Laboratorio Polarización de TransistoresDocumento10 páginasLaboratorio Polarización de Transistoresmichael stiven moreno silgadoAún no hay calificaciones
- Polarización de transistores BJTDocumento6 páginasPolarización de transistores BJTmichael stiven moreno silgadoAún no hay calificaciones
- Funcionamiento del diodo zener como regulador de tensiónDocumento4 páginasFuncionamiento del diodo zener como regulador de tensiónmauricio duranAún no hay calificaciones
- Formato de Ficha de Postulación: Concurso Público Practicante # - OefaDocumento3 páginasFormato de Ficha de Postulación: Concurso Público Practicante # - OefaMIGCELY ZARAITT GOMEZ ROJASAún no hay calificaciones
- Calor, cambios de estado y entropíaDocumento14 páginasCalor, cambios de estado y entropíaOmar CarrascoAún no hay calificaciones
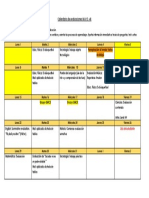
- 4B Calendario de Evaluaciones - MAYO PDFDocumento1 página4B Calendario de Evaluaciones - MAYO PDFKatherine alejandra Carrasco moranAún no hay calificaciones
- Temario Sistemas OperativosDocumento6 páginasTemario Sistemas OperativosJosue RamosAún no hay calificaciones
- Problematicas AdagDocumento47 páginasProblematicas AdagTatianaAún no hay calificaciones
- Laboratorio de Hidrologia 1Documento8 páginasLaboratorio de Hidrologia 1Maico VargasAún no hay calificaciones
- Presupuesto de Efectivo Neto-1 - Trabajo 2Documento6 páginasPresupuesto de Efectivo Neto-1 - Trabajo 2Leslie J. TéllezAún no hay calificaciones
- Contrato N°214 Vera Petit Adelaida Del CarmenDocumento3 páginasContrato N°214 Vera Petit Adelaida Del CarmenMary MarinAún no hay calificaciones
- Seguridad Ocupacional y Amonestaciones EscritasDocumento12 páginasSeguridad Ocupacional y Amonestaciones EscritasMARIA JOSE SILVA MUÑOZAún no hay calificaciones
- Movimiento EcologistaDocumento4 páginasMovimiento EcologistaJorge MendozaAún no hay calificaciones
- Verificacion Diaria de VehiculosDocumento3 páginasVerificacion Diaria de VehiculosJonathan Martinez GuerraAún no hay calificaciones
- 2012 Tesis Mantilla Gualdron Jose PabloDocumento79 páginas2012 Tesis Mantilla Gualdron Jose PabloAndrés AlarcónAún no hay calificaciones
- Biodiversidad colombiana: ecosistemas y protecciónDocumento3 páginasBiodiversidad colombiana: ecosistemas y protecciónluz elena rojasAún no hay calificaciones
- Enfriamiento o Congelación Del Pescado - MonografiaDocumento11 páginasEnfriamiento o Congelación Del Pescado - MonografiaMayomi Mallma CárdenasAún no hay calificaciones
- Generador de Van de GraaffDocumento2 páginasGenerador de Van de GraaffGustavo Araoz SagredoAún no hay calificaciones
- Los Juegos TradicionalesDocumento7 páginasLos Juegos Tradicionalesclardromero8Aún no hay calificaciones
- Medicion Mental y TiempoDocumento1 páginaMedicion Mental y TiempoGabriela GonzalezAún no hay calificaciones
- Guia ClorofilaDocumento4 páginasGuia ClorofilaBryan Un50% (2)
- Vallarino Ramirez - Gastón Estudio Viabilidad Proyecto1Documento159 páginasVallarino Ramirez - Gastón Estudio Viabilidad Proyecto1Steph CalderonAún no hay calificaciones
- Cotización - Jessica Gutierrez - Mantenimiento y Diagnostico - T120Documento1 páginaCotización - Jessica Gutierrez - Mantenimiento y Diagnostico - T120Julio HernandezAún no hay calificaciones
- Ensayo Abandono EscolarDocumento1 páginaEnsayo Abandono EscolarFRANCIA MARISOL RACHO MAYENAún no hay calificaciones
- Alvaro Parra ComercialDocumento74 páginasAlvaro Parra ComercialCatalina Ramírez Aliste100% (1)
- Modelo de Formatos Pia 2019Documento70 páginasModelo de Formatos Pia 2019ElioParisQuispeAún no hay calificaciones
- Impacto cuencas hidrográficas desarrolloDocumento16 páginasImpacto cuencas hidrográficas desarrolloFranz Villacrez CernaAún no hay calificaciones
- HT - PolySpec® 300EXDocumento2 páginasHT - PolySpec® 300EXJmartin FloresAún no hay calificaciones