También podría gustarte
- Reconocimiento y Uso de GPS DiferencialDocumento11 páginasReconocimiento y Uso de GPS DiferencialMadeleine Mori FreyreAún no hay calificaciones
- Sistema de Posicionamiento GlobalDocumento8 páginasSistema de Posicionamiento GlobalArlan Sanchez MontenegroAún no hay calificaciones
- Sistema de Posicionamiento Global - Wikipedia, La Enciclopedia LibreDocumento10 páginasSistema de Posicionamiento Global - Wikipedia, La Enciclopedia LibreEdgar BolivarAún no hay calificaciones
- Sistema de Posicionamiento GlobalDocumento71 páginasSistema de Posicionamiento GlobalANA TOÑO BULUXAún no hay calificaciones
- Informe GPS DiferencialDocumento17 páginasInforme GPS DiferencialLuis Olortin ValentinAún no hay calificaciones
- Trabajo Gps FinalDocumento18 páginasTrabajo Gps FinalMarvella AvilaAún no hay calificaciones
- Informe GPSDocumento11 páginasInforme GPSSinia EcheverriaAún no hay calificaciones
- VelocidadDocumento12 páginasVelocidadJess Pruna BenalcazarAún no hay calificaciones
- GpsDocumento26 páginasGpsalonsoAún no hay calificaciones
- Proyecto GpsDocumento86 páginasProyecto GpsFelipe Guajardo PérezAún no hay calificaciones
- GPS LecturaDocumento10 páginasGPS LecturaMeme GxAún no hay calificaciones
- Sistema de Posicionamiento Global ¿Qué Es El GPS?Documento6 páginasSistema de Posicionamiento Global ¿Qué Es El GPS?Jesus David Borja TordecillaAún no hay calificaciones
- Taller Uso GPSDocumento8 páginasTaller Uso GPSToni MartínezAún no hay calificaciones
- Sistema de Posicionamiento Global (GPS)Documento17 páginasSistema de Posicionamiento Global (GPS)KevinAún no hay calificaciones
- Funcionamientos Del GpsDocumento10 páginasFuncionamientos Del Gpscesar monrroyAún no hay calificaciones
- Informe TopografiaDocumento27 páginasInforme TopografiaJHONY ALEXANDER GOMEZ CALSINAún no hay calificaciones
- Sistema de Posicionamiento Global (GPS) PDFDocumento14 páginasSistema de Posicionamiento Global (GPS) PDFJEDUZOR OrozcoAún no hay calificaciones
- Marco TeóricoDocumento14 páginasMarco TeóricoRodrigo RuizAún no hay calificaciones
- Introduccion A GPS II VersionDocumento111 páginasIntroduccion A GPS II Versioningenieriageos1842Aún no hay calificaciones
- "Año de La Lucha Contra La Corrupción E Impunidad " Universidad Nacional de San Martín Facultad de Ciencias Agrarias Escuela Profesional de AgronomíaDocumento5 páginas"Año de La Lucha Contra La Corrupción E Impunidad " Universidad Nacional de San Martín Facultad de Ciencias Agrarias Escuela Profesional de AgronomíaAngel Gabriel López CamposAún no hay calificaciones
- 14 Sistema de Posicionamiento GlobalDocumento12 páginas14 Sistema de Posicionamiento Globaloscar mamaniAún no hay calificaciones
- Diapositiva GPSDocumento14 páginasDiapositiva GPSGpsAún no hay calificaciones
- Historia y orígenes del GPSDocumento26 páginasHistoria y orígenes del GPSangel0% (1)
- Informe GpsDocumento18 páginasInforme GpsMiguel AngelAún no hay calificaciones
- Topografía GpsDocumento39 páginasTopografía GpsLuis Miguel Peña ValeroAún no hay calificaciones
- Gps Pop Chalib.Documento12 páginasGps Pop Chalib.Bryan Alexander Pop ChalibAún no hay calificaciones
- Trabajo Con GpsDocumento13 páginasTrabajo Con GpsFélix Quispe YucraAún no hay calificaciones
- Marco TeoricoDocumento8 páginasMarco TeoricoValentino RickyAún no hay calificaciones
- Ensayo de GPSDocumento8 páginasEnsayo de GPSYefersson Rodriguez CueroAún no hay calificaciones
- Teoría 09. Raro El Sistema GPSDocumento8 páginasTeoría 09. Raro El Sistema GPSGerson ArbildoAún no hay calificaciones
- GPSDocumento13 páginasGPSUrania Serena Moreno GranadosAún no hay calificaciones
- GPS y UTM GEO MAPDocumento11 páginasGPS y UTM GEO MAPDany ValdezAún no hay calificaciones
- El Sistema de Posicionamiento GlobalDocumento20 páginasEl Sistema de Posicionamiento Globaldarwin manuelAún no hay calificaciones
- Clases GPSDocumento13 páginasClases GPSJahir MaguiñaAún no hay calificaciones
- GPSDocumento4 páginasGPSFercHo MDsAún no hay calificaciones
- Proyecto de Levantamiento Con GPS1Documento50 páginasProyecto de Levantamiento Con GPS1FRANKLIN REMY FARIAS NOLEAún no hay calificaciones
- GPS y DistanciometroDocumento3 páginasGPS y Distanciometroanon_493424428Aún no hay calificaciones
- EL GPS DetalladoDocumento4 páginasEL GPS Detalladojuan carlosAún no hay calificaciones
- GpsDocumento39 páginasGpsYefferson Andres Rodrigues RiascosAún no hay calificaciones
- GPS: Sistema de posicionamiento globalDocumento12 páginasGPS: Sistema de posicionamiento globalRodnyAún no hay calificaciones
- Informe GPSDocumento18 páginasInforme GPSMauricio H ReyesAún no hay calificaciones
- INFORMEDocumento9 páginasINFORMEGian Marco Romero CastilloAún no hay calificaciones
- Universidad Nacional de San Agustín de Arequipa: Geodesia SatelitalDocumento8 páginasUniversidad Nacional de San Agustín de Arequipa: Geodesia SatelitalCristhian TaparaAún no hay calificaciones
- El GPSDocumento19 páginasEl GPSAlberto Gallardo QuispeAún no hay calificaciones
- Los Sistemas Inteligentes de Geo PosicionamientoDocumento4 páginasLos Sistemas Inteligentes de Geo PosicionamientoLUCY CAYAMBEAún no hay calificaciones
- Uso Del GPS - Cordenadas Utm y GeograficasDocumento23 páginasUso Del GPS - Cordenadas Utm y GeograficasJuan Carlos Tasilla VillanuevaAún no hay calificaciones
- Monografia GPS DiferencialDocumento10 páginasMonografia GPS DiferencialRnzo Schänder Rvros67% (3)
- Levantamiento Topografico Con GPS Navegador Parque Los ÁlamosDocumento15 páginasLevantamiento Topografico Con GPS Navegador Parque Los Álamosedison german ligas nina50% (2)
- Informe GPSDocumento9 páginasInforme GPSFernando Escalante DiazAún no hay calificaciones
- Tema 4 Posicionamiento Geodésico (GPS) Gerónimo Rivera Isaac AlejandroDocumento20 páginasTema 4 Posicionamiento Geodésico (GPS) Gerónimo Rivera Isaac AlejandroHilda del Carmen Rivera Priego0% (1)
- Cómo funciona el GPSDocumento7 páginasCómo funciona el GPSjonathanAún no hay calificaciones
- Presentación 1Documento9 páginasPresentación 1Harold CanoAún no hay calificaciones
- Informe GPSDocumento25 páginasInforme GPSJhenny Calderón LaimeAún no hay calificaciones
- Proyecto GPSDocumento14 páginasProyecto GPSSthephen CurryAún no hay calificaciones
- Universidad Peruana Los Andes: Facultada de Ingeniería Carrera Profesional de Ingeníeria CivilDocumento9 páginasUniversidad Peruana Los Andes: Facultada de Ingeniería Carrera Profesional de Ingeníeria CivilJoel Dante Medina PaitaAún no hay calificaciones
- Practicas #02-Levan GPSDocumento17 páginasPracticas #02-Levan GPSJuan TCAún no hay calificaciones
- Sistema Global Navegación Por SateliteDocumento19 páginasSistema Global Navegación Por SateliteJesi VenturaAún no hay calificaciones
- Qué Es El GPSDocumento9 páginasQué Es El GPSJessica Gabriela Quispe AmancaAún no hay calificaciones
- Geomática Tecnologías De Punta: 1ª EdiciónDe EverandGeomática Tecnologías De Punta: 1ª EdiciónCalificación: 4 de 5 estrellas4/5 (3)
- Tema 1. Cimentaciones Luis Aldair Pérez JiménezDocumento14 páginasTema 1. Cimentaciones Luis Aldair Pérez JiménezAldair PJAún no hay calificaciones
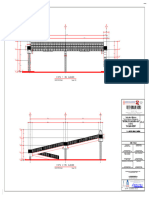
- ARQUITECTONICO PUENTE 3 ARQ02-ModelDocumento1 páginaARQUITECTONICO PUENTE 3 ARQ02-ModelAldair PJAún no hay calificaciones
- Actividad 4. Tema 3. Rodriguez Pérez Luis AngelDocumento12 páginasActividad 4. Tema 3. Rodriguez Pérez Luis AngelAldair PJAún no hay calificaciones
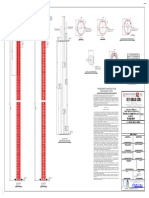
- EST 02 - Rev - 0 EST 02Documento1 páginaEST 02 - Rev - 0 EST 02Aldair PJAún no hay calificaciones
- Exposicion - Tema 2 - CimentacionesDocumento10 páginasExposicion - Tema 2 - CimentacionesAldair PJAún no hay calificaciones
- Examen CimentacionesDocumento2 páginasExamen CimentacionesAldair PJAún no hay calificaciones
- Equipo 2 Macro y MicrolocalizaciónDocumento11 páginasEquipo 2 Macro y MicrolocalizaciónAldair PJAún no hay calificaciones
- Tema 4. Cimentaciones Luis Aldair Pérez JiménezDocumento12 páginasTema 4. Cimentaciones Luis Aldair Pérez JiménezAldair PJAún no hay calificaciones
- Problema en CarreteraDocumento3 páginasProblema en CarreteraAldair PJAún no hay calificaciones
- Act. 6 Luis Aldair Pérez JiménezDocumento9 páginasAct. 6 Luis Aldair Pérez JiménezAldair PJAún no hay calificaciones
- Exámen Acero Tema 3Documento10 páginasExámen Acero Tema 3Aldair PJAún no hay calificaciones
- ITVH AC 1381pdfDocumento2 páginasITVH AC 1381pdfAldair PJAún no hay calificaciones
- Itvh Ac 1395Documento2 páginasItvh Ac 1395Aldair PJAún no hay calificaciones
- ESTRUCTURALES CASA MEDELLIN (1) - ModelDocumento1 páginaESTRUCTURALES CASA MEDELLIN (1) - ModelAldair PJAún no hay calificaciones
- Numero GeneradoresDocumento1 páginaNumero GeneradoresAldair PJAún no hay calificaciones
- Ensayo de Estrategia de PrecioDocumento3 páginasEnsayo de Estrategia de PrecioAldair PJAún no hay calificaciones
- PresupuestoConstrucciónViviendaDocumento18 páginasPresupuestoConstrucciónViviendaAldair PJAún no hay calificaciones
- Programa Sectorial de Energia Recursos Naturales y Proteccion AmbientalDocumento100 páginasPrograma Sectorial de Energia Recursos Naturales y Proteccion AmbientalAldair PJAún no hay calificaciones
- Act. 5 Luis Aldair Pérez JiménezDocumento9 páginasAct. 5 Luis Aldair Pérez JiménezAldair PJAún no hay calificaciones
- Ley de Asentamientos Humanos Ordenamiento Territorial y Desarrollo Urbano Del Estado de TabascoDocumento132 páginasLey de Asentamientos Humanos Ordenamiento Territorial y Desarrollo Urbano Del Estado de TabascoAureo GonzalezAún no hay calificaciones
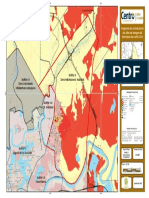
- Actualización del Atlas de Riesgos del Municipio de CentroDocumento1 páginaActualización del Atlas de Riesgos del Municipio de CentroAldair PJAún no hay calificaciones
- Costos y presupuestos ingeniería civilDocumento5 páginasCostos y presupuestos ingeniería civilAldair PJAún no hay calificaciones
- Programa Municipal de Proteccion Civil 2014-2015Documento136 páginasPrograma Municipal de Proteccion Civil 2014-2015Aldair PJAún no hay calificaciones
- Ayuntamiento de Centro aprueba reglamento de protección civilDocumento57 páginasAyuntamiento de Centro aprueba reglamento de protección civilAldair PJAún no hay calificaciones
- Inv. Tema 5 Luis Aldair Pérez JiménezDocumento35 páginasInv. Tema 5 Luis Aldair Pérez JiménezAldair PJAún no hay calificaciones
- AtlasDeRiesgosCentro2015 COMPLETO HD PDFDocumento240 páginasAtlasDeRiesgosCentro2015 COMPLETO HD PDFAldair PJAún no hay calificaciones
- Seguridad en la obraDocumento38 páginasSeguridad en la obraAldair PJAún no hay calificaciones
- U5 - T5 - Propiedades de SuelosDocumento5 páginasU5 - T5 - Propiedades de SuelosAldair PJAún no hay calificaciones
- Unidad 3 - Parte 3 - Equipo 3 - Arias Gonzales Luis AlbertoDocumento42 páginasUnidad 3 - Parte 3 - Equipo 3 - Arias Gonzales Luis AlbertoAldair PJAún no hay calificaciones
- Caracteristicas Del BarrocoDocumento8 páginasCaracteristicas Del BarrocoDhana GonzalesAún no hay calificaciones
- (Teórico) Lugar GeométricoDocumento1 página(Teórico) Lugar Geométricopelon25Aún no hay calificaciones
- Ucm t29075 PDFDocumento478 páginasUcm t29075 PDFgustavo2289Aún no hay calificaciones
- Examen de Fisicoquimica Aplicada IDocumento1 páginaExamen de Fisicoquimica Aplicada IAlba Duaneth Rocabado MendietaAún no hay calificaciones
- Problemas ElectrostaticaDocumento5 páginasProblemas ElectrostaticaYolanda Thrasher de MustaineAún no hay calificaciones
- 2 - Espesamiento de Concentrado de Cobre y Molibdeno Rev. 0Documento102 páginas2 - Espesamiento de Concentrado de Cobre y Molibdeno Rev. 0Sebastian Vera100% (1)
- Actividad Unidad2Documento6 páginasActividad Unidad2marcotulio9272Aún no hay calificaciones
- Logica Expresiones Logicas TablasDocumento3 páginasLogica Expresiones Logicas TablasLeonardo VillegasAún no hay calificaciones
- Clasificacion de PAEVDocumento17 páginasClasificacion de PAEVFredy RaulAún no hay calificaciones
- Actividad 1. Cuadro ComparativoDocumento4 páginasActividad 1. Cuadro ComparativoLizeth H.Aún no hay calificaciones
- El TornoDocumento25 páginasEl TornoNorbertoEsparzaAún no hay calificaciones
- GALLETASDocumento24 páginasGALLETASAbigail Vidal BaldelomarAún no hay calificaciones
- Urea y CreatininaDocumento27 páginasUrea y CreatininaJamyl Javier EchegarayAún no hay calificaciones
- Analisis de CorrelacionDocumento33 páginasAnalisis de CorrelacionAngel Manuel Phreed Kovaceff Brena SichaAún no hay calificaciones
- Excel GlosarioDocumento3 páginasExcel GlosarioBruno Amacifuen100% (1)
- Gestión avanzada de centros de datos virtualesDocumento7 páginasGestión avanzada de centros de datos virtualesAriel perezAún no hay calificaciones
- 1.-Introducción Motores A ReaccionDocumento31 páginas1.-Introducción Motores A ReaccionFrank RubioAún no hay calificaciones
- Examen BDocumento2 páginasExamen BKARINE CASTRO POCCORIAún no hay calificaciones
- Articulo 7Documento10 páginasArticulo 7fedeAún no hay calificaciones
- Modelos de Toma de DecisionDocumento9 páginasModelos de Toma de DecisionFreddy J Hernández100% (1)
- Diferencial de BarrasDocumento33 páginasDiferencial de BarrasAnonymous ch8u7X100% (1)
- Razonamiento lógico jurídicoDocumento31 páginasRazonamiento lógico jurídicoMarco Antonio Lamas Sangama100% (3)
- TALLER IC y PHDocumento4 páginasTALLER IC y PHlocoflow100% (1)
- Numero 49Documento38 páginasNumero 49maria__luceroAún no hay calificaciones
- 1191 Luisa Salon Tarea 1 Pensamiento LogicoDocumento15 páginas1191 Luisa Salon Tarea 1 Pensamiento LogicoDaniela AlejandraAún no hay calificaciones
- Alme32 1 PDFDocumento758 páginasAlme32 1 PDFIgnacio MartinezAún no hay calificaciones
- 4.3 Celdas Combustible Alcohol DirectoDocumento23 páginas4.3 Celdas Combustible Alcohol DirectoRonald Leandro GuzmanAún no hay calificaciones
- Estenosis MitralDocumento6 páginasEstenosis MitralFernanda Soto100% (1)
- NTC 535-1 MAIZ Proyecto Norma Maiz NTC 535-1Documento8 páginasNTC 535-1 MAIZ Proyecto Norma Maiz NTC 535-1Jairo100% (1)
- Práctica 8-2da. Ley de Newton (Asignación)Documento4 páginasPráctica 8-2da. Ley de Newton (Asignación)Lis MorantesAún no hay calificaciones