También podría gustarte
- Clasificación de Periodontitis Por EstadiosDocumento1 páginaClasificación de Periodontitis Por EstadiosVicky Gopinath Cevallos100% (1)
- EL GPS DetalladoDocumento4 páginasEL GPS Detalladojuan carlosAún no hay calificaciones
- Aplicación GPS Gaia para rastrear rutas en celularesDocumento5 páginasAplicación GPS Gaia para rastrear rutas en celularesJavierAún no hay calificaciones
- DefensaProtecciónDocumento28 páginasDefensaProtecciónJose NavíoAún no hay calificaciones
- Terapia de La ManoDocumento20 páginasTerapia de La ManoWilber AlegríaAún no hay calificaciones
- Prueba Unidad de Mando Mariposa j338Documento11 páginasPrueba Unidad de Mando Mariposa j338Luis ValeraAún no hay calificaciones
- Configura y usa OruxMaps para navegar rutas creadas en Google EarthDocumento3 páginasConfigura y usa OruxMaps para navegar rutas creadas en Google EarthManuel Alejandro SanchezAún no hay calificaciones
- Estacion Total Carapari RiverDocumento12 páginasEstacion Total Carapari RiverJesus Ninaja100% (1)
- Ensayo Sobre El GPSDocumento8 páginasEnsayo Sobre El GPSPaola RuizAún no hay calificaciones
- PRESENTACIONDocumento23 páginasPRESENTACIONLuis camposAún no hay calificaciones
- GEODESIA-LEVANTAMIENTO HIDROGRAFICODocumento12 páginasGEODESIA-LEVANTAMIENTO HIDROGRAFICOhenry Sosa100% (1)
- Informe Levantamiento Topografico 1Documento6 páginasInforme Levantamiento Topografico 1RUBEN MAMANI TITOAún no hay calificaciones
- Levantamiento topográfico de la carretera MollebayaDocumento9 páginasLevantamiento topográfico de la carretera MollebayaNerozzurri Raqc RaqcAún no hay calificaciones
- Control Geodésico Venezuela: Sistema REGVENDocumento37 páginasControl Geodésico Venezuela: Sistema REGVENSaritza MatosAún no hay calificaciones
- SUCE GPS Station DescriptionDocumento2 páginasSUCE GPS Station DescriptionMauricio PozoAún no hay calificaciones
- PROCESAMIENTODocumento33 páginasPROCESAMIENTODann GCAún no hay calificaciones
- SentinelDocumento3 páginasSentinelGerardo ChavarríaAún no hay calificaciones
- Contexto de Cutervo InformeDocumento8 páginasContexto de Cutervo InformeJoaquin OrtizAún no hay calificaciones
- Descripción de La Estación Gnss MedeDocumento2 páginasDescripción de La Estación Gnss MedewillAún no hay calificaciones
- Red vial peruanaDocumento19 páginasRed vial peruanaAntonyG.MorenoAún no hay calificaciones
- Informe CatastralDocumento13 páginasInforme CatastralrimmaAún no hay calificaciones
- Guía Implementación Sala Situacional Municipal SANDocumento75 páginasGuía Implementación Sala Situacional Municipal SANWilmer SinayAún no hay calificaciones
- SIG en AgriculturaDocumento9 páginasSIG en AgriculturaSergioGomezAún no hay calificaciones
- GPS HIPer GGD BrochureDocumento6 páginasGPS HIPer GGD Brochureplumb100Aún no hay calificaciones
- "Año de La Lucha Contra La Corrupción E Impunidad " Universidad Nacional de San Martín Facultad de Ciencias Agrarias Escuela Profesional de AgronomíaDocumento5 páginas"Año de La Lucha Contra La Corrupción E Impunidad " Universidad Nacional de San Martín Facultad de Ciencias Agrarias Escuela Profesional de AgronomíaAngel Gabriel López CamposAún no hay calificaciones
- Informe de Trabajo Peru SATDocumento16 páginasInforme de Trabajo Peru SATMauricio Coaguila EsquiaAún no hay calificaciones
- Inf Ptos Geod Minas Carolina UNADocumento16 páginasInf Ptos Geod Minas Carolina UNAWilder AtencioAún no hay calificaciones
- El Papel de Los Ods y en El Manejo de Las Cuencas HidrográficasDocumento2 páginasEl Papel de Los Ods y en El Manejo de Las Cuencas HidrográficaswaraquerAún no hay calificaciones
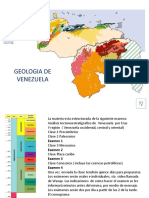
- Introduccion Geologia de VenezuelaDocumento2 páginasIntroduccion Geologia de VenezuelaangelaAún no hay calificaciones
- Satelites SpotDocumento3 páginasSatelites SpotJuan SoelAún no hay calificaciones
- Presentacion CatastroDocumento6 páginasPresentacion CatastroJavier Flores Ramos100% (1)
- NTRIP: Herramienta Indispensable para la Cartografía y el CatastroDocumento29 páginasNTRIP: Herramienta Indispensable para la Cartografía y el CatastroIleanisAún no hay calificaciones
- Xviii Mateo MarialauraDocumento269 páginasXviii Mateo MarialauraIvEtte CamposAún no hay calificaciones
- (PPT) Análisis de Imágenes Satelitales para El Estudio de Dinámicas TerritorialesDocumento23 páginas(PPT) Análisis de Imágenes Satelitales para El Estudio de Dinámicas TerritorialesDavid Sebastián Decena LópezAún no hay calificaciones
- Guía TBCDocumento20 páginasGuía TBCseldon_geu0% (1)
- GeomáticaDocumento12 páginasGeomáticaav xmAún no hay calificaciones
- GeomáticaDocumento12 páginasGeomáticaJordan Kuz IijimaAún no hay calificaciones
- Documento Red Vial Oficial 2010Documento155 páginasDocumento Red Vial Oficial 2010Armando Diaz SalazarAún no hay calificaciones
- SPOT, el satélite francés para observación de la TierraDocumento28 páginasSPOT, el satélite francés para observación de la TierraMiguel Alejandro Jara Chavez50% (2)
- Esquema SIGDocumento3 páginasEsquema SIGCarlos DiazAún no hay calificaciones
- Proyecto de Inversion TrabajoDocumento25 páginasProyecto de Inversion TrabajoHans AlarconAún no hay calificaciones
- Estudio geodésico ChalacoDocumento13 páginasEstudio geodésico ChalacoedgarAún no hay calificaciones
- 07 Generacion de Informacion Catastral Rural PDFDocumento51 páginas07 Generacion de Informacion Catastral Rural PDFJavier CNAún no hay calificaciones
- Captura de datos raster: escáner, satélite, importación, rasterizaciónDocumento5 páginasCaptura de datos raster: escáner, satélite, importación, rasterizaciónlouisdroguettAún no hay calificaciones
- SIG para ingeniería civilDocumento17 páginasSIG para ingeniería civilasly vanesa velezAún no hay calificaciones
- Nivel en ADocumento3 páginasNivel en AfranklinAún no hay calificaciones
- Manual de Uso GPS PDFDocumento29 páginasManual de Uso GPS PDFWalter Pedro Quisoccapa ApazaAún no hay calificaciones
- Mapa Geologico MetadataDocumento2 páginasMapa Geologico MetadataRandy Minaya BottoniAún no hay calificaciones
- Trimble R7GNSSDocumento2 páginasTrimble R7GNSSYenny Flores FlorezAún no hay calificaciones
- Mapa FisiográficoDocumento5 páginasMapa FisiográficoVidal Antony Barrientos CruzAún no hay calificaciones
- Informe Técnico - Certificación MOYOBAMBADocumento22 páginasInforme Técnico - Certificación MOYOBAMBAJesus DurandAún no hay calificaciones
- Objetivos y JustificacionDocumento1 páginaObjetivos y JustificacionEdy Ramos LeonAún no hay calificaciones
- Estandares Cartograficos para Mapas Geologicos 1m 500k 100k 50k 25k y 10k - 2016Documento3 páginasEstandares Cartograficos para Mapas Geologicos 1m 500k 100k 50k 25k y 10k - 2016Robin PlazasAún no hay calificaciones
- Delimitación y parámetros de cuencas con Global MapperDocumento9 páginasDelimitación y parámetros de cuencas con Global MapperJavier Yribarren MondejarAún no hay calificaciones
- Pigars UtcubambaDocumento189 páginasPigars UtcubambaJorge Ramos MontenegroAún no hay calificaciones
- TDR Especialista SIGDocumento4 páginasTDR Especialista SIGSantiago JoseAún no hay calificaciones
- Propuesta Tecnico EconomicaDocumento4 páginasPropuesta Tecnico EconomicaYessa SandritaAún no hay calificaciones
- Manual Levantamiento Catastral RuralDocumento87 páginasManual Levantamiento Catastral RuralYulius Navas MendiolaAún no hay calificaciones
- GPS DiferencialDocumento16 páginasGPS DiferencialRenzo GutierrezAún no hay calificaciones
- Informe Satelite Peruano SAT 1Documento41 páginasInforme Satelite Peruano SAT 1royAún no hay calificaciones
- Introduccion GPSDocumento1 páginaIntroduccion GPSAlonso AlmestarAún no hay calificaciones
- Atlas Rural Del Ecuador 2017 PDFDocumento211 páginasAtlas Rural Del Ecuador 2017 PDFOscar Roberto EspinozaAún no hay calificaciones
- Qué Es y para Qué Sirve El GPSDocumento6 páginasQué Es y para Qué Sirve El GPSWILIAún no hay calificaciones
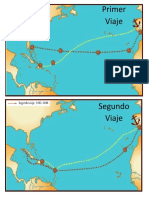
- Viajes de Cristobal ColonDocumento2 páginasViajes de Cristobal ColonDany ValdezAún no hay calificaciones
- Anécdota de Un ViajeDocumento8 páginasAnécdota de Un ViajeDany Valdez100% (1)
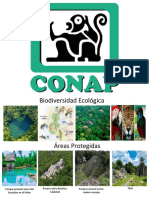
- CanapDocumento4 páginasCanapDany ValdezAún no hay calificaciones
- Estudiante: - Area de Servicio: - MesDocumento3 páginasEstudiante: - Area de Servicio: - MesDany ValdezAún no hay calificaciones
- ValoresDocumento3 páginasValoresDany ValdezAún no hay calificaciones
- Temas VariosDocumento6 páginasTemas VariosDany ValdezAún no hay calificaciones
- GraficasDocumento14 páginasGraficasDany ValdezAún no hay calificaciones
- Valores 1Documento2 páginasValores 1Dany ValdezAún no hay calificaciones
- Normas MoralesDocumento7 páginasNormas MoralesDany ValdezAún no hay calificaciones
- Evaluación de Cuatro Diferentes Alimentos Balanceados Comerciales en La Alimentación de Pollo de EngordeDocumento3 páginasEvaluación de Cuatro Diferentes Alimentos Balanceados Comerciales en La Alimentación de Pollo de EngordeDany ValdezAún no hay calificaciones
- Factores clave en la formación de suelos: clima, biota, relieve y rocaDocumento5 páginasFactores clave en la formación de suelos: clima, biota, relieve y rocaDany ValdezAún no hay calificaciones
- Historia de La ComputadoraDocumento8 páginasHistoria de La ComputadoraBryan AlejandroAún no hay calificaciones
- Cultura: (Freud, 1900) (Da Vinci, 2010)Documento1 páginaCultura: (Freud, 1900) (Da Vinci, 2010)Dany ValdezAún no hay calificaciones
- Empresa SingularDocumento5 páginasEmpresa SingularDany ValdezAún no hay calificaciones
- CuadradoDocumento5 páginasCuadradoDany ValdezAún no hay calificaciones
- Colinda Con: Colinda ConDocumento2 páginasColinda Con: Colinda ConDany ValdezAún no hay calificaciones
- Ayudar en Las Tareas Del Hogarrespetar A Los Mayores Cuidar El Medio AmbienteDocumento3 páginasAyudar en Las Tareas Del Hogarrespetar A Los Mayores Cuidar El Medio AmbienteDany ValdezAún no hay calificaciones
- FutbolDocumento2 páginasFutbolDany ValdezAún no hay calificaciones
- Emprendimientos Más InfluyentesDocumento3 páginasEmprendimientos Más InfluyentesDany Valdez100% (1)
- La física y sus vínculosDocumento8 páginasLa física y sus vínculosDany ValdezAún no hay calificaciones
- Corrientes PedagogicasDocumento6 páginasCorrientes PedagogicasDany ValdezAún no hay calificaciones
- El Origen de La Educación FísicaDocumento1 páginaEl Origen de La Educación FísicaDany ValdezAún no hay calificaciones
- Idiomas de GuatemalaDocumento3 páginasIdiomas de GuatemalaDany ValdezAún no hay calificaciones
- RouterDocumento2 páginasRouterDany ValdezAún no hay calificaciones
- Historia de Las Redes SocialesDocumento2 páginasHistoria de Las Redes SocialesDany ValdezAún no hay calificaciones
- El corazón de una madre: origen y significado del Día de la MadreDocumento2 páginasEl corazón de una madre: origen y significado del Día de la MadreDany ValdezAún no hay calificaciones
- Tipos de Influencias de La Religion en La DelincuenciaDocumento9 páginasTipos de Influencias de La Religion en La DelincuenciaDany ValdezAún no hay calificaciones
- Turismo NaturalDocumento1 páginaTurismo NaturalDany ValdezAún no hay calificaciones
- Historia y Evolución Del AutomóvilDocumento2 páginasHistoria y Evolución Del AutomóvilDany ValdezAún no hay calificaciones
- NavegadoresDocumento12 páginasNavegadoresDany ValdezAún no hay calificaciones
- Objetivos y riesgos eléctricosDocumento38 páginasObjetivos y riesgos eléctricosGuillermoAún no hay calificaciones
- Aaala Teoría Cualitativa Global en El PlanoDocumento7 páginasAaala Teoría Cualitativa Global en El PlanoGarcía Abdiel EduardoAún no hay calificaciones
- IV SES TUTO LUN 8 IMPORTANCIA DEL DESAYUNODocumento7 páginasIV SES TUTO LUN 8 IMPORTANCIA DEL DESAYUNOmaritza zea100% (1)
- Historia y Desarrollo de Los Submarinos. Parte 2Documento27 páginasHistoria y Desarrollo de Los Submarinos. Parte 2LoboCincoSeisNueveAún no hay calificaciones
- Guias de Practicas para Tecnologia en Lacteos Primera EdicionDocumento46 páginasGuias de Practicas para Tecnologia en Lacteos Primera EdicionPilos Net100% (1)
- Manual DPM 3Documento7 páginasManual DPM 3Ilichs ChávezAún no hay calificaciones
- Jose Perez ColmenaresDocumento11 páginasJose Perez ColmenaresBhrendherthban HernandezAún no hay calificaciones
- Siete Leyes Del Cao ListoDocumento46 páginasSiete Leyes Del Cao ListoJhonar MagallanesAún no hay calificaciones
- Receta de Tuétanos A La ParrillaDocumento5 páginasReceta de Tuétanos A La ParrillaCRISTHIAN ANTONIO PRIETO COTOAún no hay calificaciones
- Conversiones de unidades de masa, longitud, volumen y tiempoDocumento2 páginasConversiones de unidades de masa, longitud, volumen y tiempoAlejandro Pineda50% (2)
- Ordenanza Local PRC Diego de Almagro 2011Documento34 páginasOrdenanza Local PRC Diego de Almagro 2011mcurihuincaAún no hay calificaciones
- Booking - Com - ConfirmaciónDocumento2 páginasBooking - Com - ConfirmaciónXaviAún no hay calificaciones
- Historia de Las Ideas Politicas - Jean Touchard 8Documento1 páginaHistoria de Las Ideas Politicas - Jean Touchard 8Jhon Anderson Tatoos0% (1)
- Psicologia Social-Febrero 2001A 1S (Apuntes Examenes Psicologia Uned Esquemas Resumen)Documento7 páginasPsicologia Social-Febrero 2001A 1S (Apuntes Examenes Psicologia Uned Esquemas Resumen)ppedrooAún no hay calificaciones
- MEMORIASDocumento36 páginasMEMORIASArmando Carranza0% (1)
- Curso de Adiestradas MJCDocumento79 páginasCurso de Adiestradas MJCAndrea Lizet Hernandez GonzalezAún no hay calificaciones
- Clase Práctica 10Documento2 páginasClase Práctica 10correofake09Aún no hay calificaciones
- Macroeconomía y Política Económica: Análisis de indicadores y escenarios futurosDocumento3 páginasMacroeconomía y Política Económica: Análisis de indicadores y escenarios futurosflor hernandezAún no hay calificaciones
- Contaminacion Por Efluentes Domesticos en El Rio MapachoDocumento10 páginasContaminacion Por Efluentes Domesticos en El Rio MapachoronnyAún no hay calificaciones
- S15 s15 La Ingeniería Eléctrica y La Transmisión de EnergíaDocumento23 páginasS15 s15 La Ingeniería Eléctrica y La Transmisión de Energíaangel riveraAún no hay calificaciones
- Tecnica de Aleta de MordidaDocumento105 páginasTecnica de Aleta de MordidaAngel BeltreAún no hay calificaciones
- ONU-Guia para Crear Observatorio Urb LocalDocumento47 páginasONU-Guia para Crear Observatorio Urb LocalChaly2kAún no hay calificaciones
- MDocumento102 páginasMNilAún no hay calificaciones
- Anuario UFRO 2010Documento120 páginasAnuario UFRO 2010Dirección de Análisis y Desarrollo Institucional, UFROAún no hay calificaciones
- Dieta de 2900 Kcal con distribución de macronutrientesDocumento2 páginasDieta de 2900 Kcal con distribución de macronutrientesQwiike MarinAún no hay calificaciones
- Clase 12 Décimo Antropologia AristotelicaDocumento6 páginasClase 12 Décimo Antropologia Aristotelicaisabella boteroAún no hay calificaciones