También podría gustarte
- Recepción y distribución de señales de radiodifusión. ELES0108De EverandRecepción y distribución de señales de radiodifusión. ELES0108Aún no hay calificaciones
- Tema 11 Sensores de Nivel y ProximidadDocumento40 páginasTema 11 Sensores de Nivel y ProximidadEmanuel CrespoAún no hay calificaciones
- 1.4 Sensores de ProximidadDocumento5 páginas1.4 Sensores de ProximidadAlexis Bran AraizAún no hay calificaciones
- Mantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109De EverandMantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109Aún no hay calificaciones
- Sensor de ProximidadDocumento9 páginasSensor de ProximidadBipe Xolot PioAún no hay calificaciones
- H.sensores de ProximidadDocumento119 páginasH.sensores de ProximidadWilly LudeñaAún no hay calificaciones
- Sensores y ActuadoresDocumento55 páginasSensores y ActuadoresRuben AmayaAún no hay calificaciones
- SensorProxIR-LabSensoresActuadores-Practica5Documento7 páginasSensorProxIR-LabSensoresActuadores-Practica5Julio RodríguezAún no hay calificaciones
- Sensores y Traductores. ESPDocumento15 páginasSensores y Traductores. ESPAlejandro Gil GarcíaAún no hay calificaciones
- La11 InstrumentacionDocumento19 páginasLa11 InstrumentacionJames Jerry YTAún no hay calificaciones
- Sensores Industriales PDFDocumento33 páginasSensores Industriales PDFJorge OltoliniAún no hay calificaciones
- Sensor de proximidad: principios, tipos y aplicacionesDocumento14 páginasSensor de proximidad: principios, tipos y aplicacionesCarlos Natanael Morales MandujanoAún no hay calificaciones
- Sensores de ProximidadDocumento10 páginasSensores de Proximidadwinco4100% (1)
- Control eléctrico-sensoresDocumento35 páginasControl eléctrico-sensoresAngee Lisset ClavijoAún no hay calificaciones
- Sensores y Autadores PDFDocumento44 páginasSensores y Autadores PDFMiguel Angel Mayma CahuaAún no hay calificaciones
- Taller1 - U1 - Sensor Ultrasonico - HCDocumento5 páginasTaller1 - U1 - Sensor Ultrasonico - HCMaribel OrtizAún no hay calificaciones
- Sensores y actuadores: clasificación y característicasDocumento44 páginasSensores y actuadores: clasificación y característicasDIEGO ALBERTO HUAMAN BARRIENTOSAún no hay calificaciones
- Sesion 03 Sensores de ProximidadDocumento76 páginasSesion 03 Sensores de Proximidadjose carlos Caceres PacsiAún no hay calificaciones
- VinculaciónEPN SensorUlFotoceldaDocumento33 páginasVinculaciónEPN SensorUlFotoceldaLeonardo AmayaAún no hay calificaciones
- Practica 4. Garcia Gonzalez DaianaDocumento11 páginasPractica 4. Garcia Gonzalez DaianaMichel IslasAún no hay calificaciones
- SensorUltrasónico NP13Documento4 páginasSensorUltrasónico NP13Rodrigo VegaAún no hay calificaciones
- Sensores InductivosDocumento28 páginasSensores InductivosPAPOFULEAún no hay calificaciones
- Sensores Utilizados en La Neumática y HidráulicaDocumento14 páginasSensores Utilizados en La Neumática y HidráulicaRene Lopez100% (2)
- F.sensores de ProximidadDocumento119 páginasF.sensores de Proximidadjose_cruzAún no hay calificaciones
- 1.1.1 Tipos de Sensores ÓpticosDocumento32 páginas1.1.1 Tipos de Sensores ÓpticosSinaiGarciaAún no hay calificaciones
- Circuitos Y Sistemas Electrónicos: CursoDocumento19 páginasCircuitos Y Sistemas Electrónicos: CursoAlexis Ychpas VelasquezAún no hay calificaciones
- Sensores Capacitivos e InductivosDocumento9 páginasSensores Capacitivos e InductivosRichard OlarteAún no hay calificaciones
- Sensor de ProximidadDocumento6 páginasSensor de Proximidaddelgadito99 delgatoAún no hay calificaciones
- Los Sensores de Proximidad InductivosDocumento21 páginasLos Sensores de Proximidad InductivosnestorflowAún no hay calificaciones
- SensoresPLCDocumento34 páginasSensoresPLCJesus LlontopAún no hay calificaciones
- Lab 11 Proximidad1Documento19 páginasLab 11 Proximidad1Rodrigo HerreraAún no hay calificaciones
- Sensores de proximidad inductivosDocumento38 páginasSensores de proximidad inductivosFranco Calderón DelgadoAún no hay calificaciones
- Sensor de Proximidad PDFDocumento6 páginasSensor de Proximidad PDFdelgadito99 delgatoAún no hay calificaciones
- Sensores Ultrasonicos HCDocumento10 páginasSensores Ultrasonicos HCorive34Aún no hay calificaciones
- 3 - Detectores ProximidadDocumento40 páginas3 - Detectores ProximidadZaki nouiAún no hay calificaciones
- Principio de Operación de Sensores de Proximidad InductivosDocumento16 páginasPrincipio de Operación de Sensores de Proximidad InductivosGuly ZandomeniAún no hay calificaciones
- 35-Sensores de Proximidad y DesplazaminetosDocumento110 páginas35-Sensores de Proximidad y DesplazaminetosERIKSON EGUSQUIZAAún no hay calificaciones
- Sensor proximidad tipos CNY70Documento8 páginasSensor proximidad tipos CNY70CristianSaldañaAún no hay calificaciones
- Exposicion Unidad 1 SensoresDocumento28 páginasExposicion Unidad 1 SensoresKarla roblesAún no hay calificaciones
- Practica 5 1910081 LabSyADocumento7 páginasPractica 5 1910081 LabSyAPato's GarageAún no hay calificaciones
- Punto 3Documento5 páginasPunto 3Noemi Mamani MamaniAún no hay calificaciones
- Sensores AutomáticosDocumento14 páginasSensores AutomáticosMauricio Ochoa MedinaAún no hay calificaciones
- Sistema de Adquisicion y Distribucion de DatosDocumento16 páginasSistema de Adquisicion y Distribucion de DatosAmely Mamani HuancaAún no hay calificaciones
- 12 - Sensores de ProximidadDocumento22 páginas12 - Sensores de ProximidadPablo Daniel AgueroAún no hay calificaciones
- Sesion03 Sensores de ProximidadDocumento70 páginasSesion03 Sensores de ProximidadKevin Aroni Arando100% (1)
- Reporte Radar ArduinoDocumento17 páginasReporte Radar ArduinoMike Morales100% (1)
- Parametrizacion SensorDocumento14 páginasParametrizacion SensorMaría AlvaradoAún no hay calificaciones
- Sensor de ultrasonidos y termistor para casa inteligente de mascotasDocumento10 páginasSensor de ultrasonidos y termistor para casa inteligente de mascotasCristian CarrilloAún no hay calificaciones
- Sensor Ultrasonico Emisor Receptor Medicion de DistanciaDocumento4 páginasSensor Ultrasonico Emisor Receptor Medicion de DistanciaOmatsito YanchaAún no hay calificaciones
- Sensores ParteDocumento90 páginasSensores ParteMelany SeijasAún no hay calificaciones
- Practica - No.1.sistema EmbebidosDocumento6 páginasPractica - No.1.sistema EmbebidosCarloz MontoyaAún no hay calificaciones
- Sensores de ProximidadDocumento4 páginasSensores de ProximidadCristobal RuizAún no hay calificaciones
- SensoresDocumento8 páginasSensoresstevenAún no hay calificaciones
- Detecta metales con sensores inductivosDocumento14 páginasDetecta metales con sensores inductivosyuliAún no hay calificaciones
- Medicion de Posicion Reporte 9Documento10 páginasMedicion de Posicion Reporte 9Samuel A. BowenAún no hay calificaciones
- Modo de Comunicación de Los SensoresDocumento2 páginasModo de Comunicación de Los SensoresPrins Feria60% (5)
- Actividad 5 Exposición Sobre SensoresDocumento8 páginasActividad 5 Exposición Sobre SensoresMr ReptileAún no hay calificaciones
- Sensores AguaDocumento30 páginasSensores AguaViviam Lizzeth Garcia DominguezAún no hay calificaciones
- SENSORES INDUCTIVOS para Unidad 2 AutomatizacionDocumento26 páginasSENSORES INDUCTIVOS para Unidad 2 AutomatizacionEduardoAlvidrezAún no hay calificaciones
- Tema 14 ControladoresDocumento26 páginasTema 14 ControladoresPABLO PEREZ CASTELLONAún no hay calificaciones
- Tema 13 Sensores de Velocidad Posición y AceleraciónDocumento60 páginasTema 13 Sensores de Velocidad Posición y AceleraciónEmanuel CrespoAún no hay calificaciones
- Tema 10-TermocuplaDocumento34 páginasTema 10-TermocuplaEmanuel CrespoAún no hay calificaciones
- Robot móvil tetrápodo: diseño y aplicacionesDocumento8 páginasRobot móvil tetrápodo: diseño y aplicacionesPABLO PEREZ CASTELLONAún no hay calificaciones
- Sensores de luz y colorDocumento34 páginasSensores de luz y colorPABLO PEREZ CASTELLONAún no hay calificaciones
- Apuntes Unidad 3Documento7 páginasApuntes Unidad 3PABLO PEREZ CASTELLONAún no hay calificaciones
- Tema2 InstrumentacionDocumento21 páginasTema2 InstrumentacionFranz Emerson Challgua CabreraAún no hay calificaciones
- Transformaciones ElementalesDocumento16 páginasTransformaciones ElementalesPABLO PEREZ CASTELLONAún no hay calificaciones
- Unidad 3Documento14 páginasUnidad 3PABLO PEREZ CASTELLONAún no hay calificaciones
- Practica 2 PDIDocumento6 páginasPractica 2 PDIPABLO PEREZ CASTELLONAún no hay calificaciones
- Procesamiento de ImagenesDocumento109 páginasProcesamiento de ImagenesLance JamesAún no hay calificaciones
- Unidad 2Documento6 páginasUnidad 2PABLO PEREZ CASTELLONAún no hay calificaciones
- Unidad 4Documento10 páginasUnidad 4PABLO PEREZ CASTELLONAún no hay calificaciones
- Unidad 1Documento16 páginasUnidad 1PABLO PEREZ CASTELLONAún no hay calificaciones
- Tipos de Puentes PDFDocumento11 páginasTipos de Puentes PDFAnonymous ZiyS3vAún no hay calificaciones
- Usar El Asistente para Copiar Bases de Datos SQL ServerDocumento4 páginasUsar El Asistente para Copiar Bases de Datos SQL ServerNestor RodriguezAún no hay calificaciones
- C2 RedoxDocumento15 páginasC2 RedoxKOBRINJAAún no hay calificaciones
- Actividad Dinámica TEMA 2Documento2 páginasActividad Dinámica TEMA 2Gabriela Vastbinder GarciaAún no hay calificaciones
- DISPAV-5-Versión 3.0. Actualización Del SistemaDocumento74 páginasDISPAV-5-Versión 3.0. Actualización Del SistemaLuiSilvestre Vaca OyolaAún no hay calificaciones
- Problemas de Termodinámica: Trabajo de Frontera y Análisis de Energía en Sistemas Cerrados.Documento3 páginasProblemas de Termodinámica: Trabajo de Frontera y Análisis de Energía en Sistemas Cerrados.Miguel L. ToledanoAún no hay calificaciones
- Práctica Estructuras Especiales 2018Documento3 páginasPráctica Estructuras Especiales 2018Orlando Butron SilisqueAún no hay calificaciones
- Control de velocidad en motoresDocumento20 páginasControl de velocidad en motoresBrayan Espinoza GarciaAún no hay calificaciones
- Poes Pasteurizador Lácteos CorregidoDocumento4 páginasPoes Pasteurizador Lácteos CorregidoOscar Eduardo Cobo Narváez50% (4)
- RTN380H en EsDocumento29 páginasRTN380H en EsERICK CHICONCULLOAún no hay calificaciones
- Presupuesto APP MOVILDocumento6 páginasPresupuesto APP MOVILViktor Olivares100% (1)
- TEMA HORMIGON Maquinaria y Equipo Nivelacion PDFDocumento29 páginasTEMA HORMIGON Maquinaria y Equipo Nivelacion PDFSERGIO GUDIÑOAún no hay calificaciones
- METALOGENIADocumento5 páginasMETALOGENIAEloy Taylor PerezAún no hay calificaciones
- Capital GateDocumento11 páginasCapital GateMarioMontalvo100% (1)
- Buenas Noches Profesor Juan Luis Ugaz Apaestegui y CompañerosDocumento2 páginasBuenas Noches Profesor Juan Luis Ugaz Apaestegui y Compañeroselvis mezaAún no hay calificaciones
- Valores Caracteristicos de Las Ondas SenoidalesDocumento12 páginasValores Caracteristicos de Las Ondas SenoidalesJeanPierSalloAún no hay calificaciones
- Resumen y Características Del Groasis WaterboxxDocumento4 páginasResumen y Características Del Groasis WaterboxxU8x58Aún no hay calificaciones
- Seminario Actualización Normativa para Ensayos de Hormigón NCH 2256/2013Documento36 páginasSeminario Actualización Normativa para Ensayos de Hormigón NCH 2256/2013victor_escudero5081Aún no hay calificaciones
- Cronograma Valorizado de Obra ActualizadoDocumento90 páginasCronograma Valorizado de Obra ActualizadoFranklin Flores SanchezAún no hay calificaciones
- Modelos de Procesos de Software para Sistemas EmbebidosDocumento4 páginasModelos de Procesos de Software para Sistemas EmbebidosSaroff Yataco IrrazábalAún no hay calificaciones
- Ojeda Contreras David Ricardo-Diferencias Entre Silla de Rueda Clinica y Silla de Rueda Deportiva-Tarea2Documento3 páginasOjeda Contreras David Ricardo-Diferencias Entre Silla de Rueda Clinica y Silla de Rueda Deportiva-Tarea2leocomputerAún no hay calificaciones
- Mecanica AplicadaDocumento4 páginasMecanica AplicadaMoises AtencioAún no hay calificaciones
- Control de Calidad DecátodosDocumento58 páginasControl de Calidad DecátodosRodrigo Andres100% (5)
- Bienvenida Al Curso Administracion FinancieraDocumento14 páginasBienvenida Al Curso Administracion FinancieraFelix Rafael Allocca TroconisAún no hay calificaciones
- Manual de Uso BEEFER FDVDocumento16 páginasManual de Uso BEEFER FDVJorge Francisco Cortínez CastroAún no hay calificaciones
- A2 Manual Procedimientos Soporte TecnicoDocumento16 páginasA2 Manual Procedimientos Soporte TecnicoMalena de VincesAún no hay calificaciones
- Instituto Tecnológico de Minatitlán: Mecánica de MaterialesDocumento2 páginasInstituto Tecnológico de Minatitlán: Mecánica de MaterialesChriss Mtzz.Aún no hay calificaciones
- Abreviacion CañeriaDocumento8 páginasAbreviacion CañeriaGustavo MardonesAún no hay calificaciones
- Calculo de Transportadores de Tornillo Sin FinDocumento10 páginasCalculo de Transportadores de Tornillo Sin FinHumberto Pinedo lunaAún no hay calificaciones
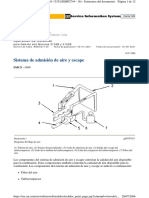
- 3126B Truck Engine Air & Exhaust SystemDocumento12 páginas3126B Truck Engine Air & Exhaust SystemBogar PinedaAún no hay calificaciones
- La revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaDe EverandLa revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaCalificación: 5 de 5 estrellas5/5 (200)
- Batidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoDe EverandBatidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoCalificación: 5 de 5 estrellas5/5 (2)
- Interpretación del ECG: Una Guía Práctica e Intuitiva para Aprender a Leer el ECG y Diagnosticar y Tratar ArritmiasDe EverandInterpretación del ECG: Una Guía Práctica e Intuitiva para Aprender a Leer el ECG y Diagnosticar y Tratar ArritmiasAún no hay calificaciones
- Disciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreDe EverandDisciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreCalificación: 5 de 5 estrellas5/5 (3)
- Zensorialmente : Dejá que tu cuerpo sea tu cerebroDe EverandZensorialmente : Dejá que tu cuerpo sea tu cerebroAún no hay calificaciones
- Prescripción de ejercico físico para la saludDe EverandPrescripción de ejercico físico para la saludCalificación: 5 de 5 estrellas5/5 (1)
- Reconstrucción de dientes endodonciados: Pautas de actuación clínicaDe EverandReconstrucción de dientes endodonciados: Pautas de actuación clínicaCalificación: 5 de 5 estrellas5/5 (4)
- Anatomía & 100 estiramientos Esenciales (Color): Técnicas, beneficios, precauciones, consejos, tablas de series, dolenciasDe EverandAnatomía & 100 estiramientos Esenciales (Color): Técnicas, beneficios, precauciones, consejos, tablas de series, dolenciasCalificación: 4.5 de 5 estrellas4.5/5 (21)
- La metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceDe EverandLa metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceCalificación: 5 de 5 estrellas5/5 (8)
- Fisiopatología de las enfermedades cardiovascularesDe EverandFisiopatología de las enfermedades cardiovascularesCalificación: 5 de 5 estrellas5/5 (1)
- El péndulo de sanación: Péndulo hebreo. Investigación y sistematización de la técnicaDe EverandEl péndulo de sanación: Péndulo hebreo. Investigación y sistematización de la técnicaCalificación: 4.5 de 5 estrellas4.5/5 (27)
- Desastres y emergencias. Prevención, mitigación y preparaciónDe EverandDesastres y emergencias. Prevención, mitigación y preparaciónCalificación: 4 de 5 estrellas4/5 (5)
- Teoría de juegos: Una introducción matemática a la toma de decisionesDe EverandTeoría de juegos: Una introducción matemática a la toma de decisionesCalificación: 4 de 5 estrellas4/5 (1)
- La vibración de las ondas cerebrales: Recuperar el ritmo de una vida saludable y felizDe EverandLa vibración de las ondas cerebrales: Recuperar el ritmo de una vida saludable y felizCalificación: 5 de 5 estrellas5/5 (7)
- Neurociencia para vencer la depresión: La esprial ascendenteDe EverandNeurociencia para vencer la depresión: La esprial ascendenteCalificación: 4.5 de 5 estrellas4.5/5 (10)
- El libro conciso de la punción seca: Manual del terapeuta para las aplicaciones en los puntos gatillo miofasciales (Color)De EverandEl libro conciso de la punción seca: Manual del terapeuta para las aplicaciones en los puntos gatillo miofasciales (Color)Calificación: 3 de 5 estrellas3/5 (2)
- Neuroanatomía: Fundamentos de neuroanatomía estructural, funcional y clínicaDe EverandNeuroanatomía: Fundamentos de neuroanatomía estructural, funcional y clínicaCalificación: 4 de 5 estrellas4/5 (16)
- Dieta Para El Reflujo Biliar y Gastritis Alcalina - Incluye 20 Deliciosas Recetas Libres de Gluten y de Lácteos Para Tratar y Aliviar el Reflujo Biliar y Sus Molestos SíntomasDe EverandDieta Para El Reflujo Biliar y Gastritis Alcalina - Incluye 20 Deliciosas Recetas Libres de Gluten y de Lácteos Para Tratar y Aliviar el Reflujo Biliar y Sus Molestos SíntomasCalificación: 4 de 5 estrellas4/5 (9)
- Trucos para Leer la Mente de los Demás: Cómo Adivinar el Pensamiento de los Demás con Poco Esfuerzo. 2 Libros en 1 - Secretos de la Psicología Oscura, Cómo ser un Detector de MentirasDe EverandTrucos para Leer la Mente de los Demás: Cómo Adivinar el Pensamiento de los Demás con Poco Esfuerzo. 2 Libros en 1 - Secretos de la Psicología Oscura, Cómo ser un Detector de MentirasCalificación: 4.5 de 5 estrellas4.5/5 (3)