También podría gustarte
- Compuertas LogicasDocumento23 páginasCompuertas LogicasM D Ruiz GalvisAún no hay calificaciones
- Maquina de Estado (Contador) LogisimDocumento6 páginasMaquina de Estado (Contador) LogisimvaleryAún no hay calificaciones
- Análisis Clásico de Sistemas DiscretosDocumento3 páginasAnálisis Clásico de Sistemas DiscretosMike AriasAún no hay calificaciones
- Tarea 1Documento14 páginasTarea 1Pedro José Patrón RodríguezAún no hay calificaciones
- 312-Audi A3 04 - Sistema EléctricoDocumento68 páginas312-Audi A3 04 - Sistema Eléctricomaxaub8293% (14)
- Practica de Electricidad 02Documento3 páginasPractica de Electricidad 02Johana Patricia Rojas HernandezAún no hay calificaciones
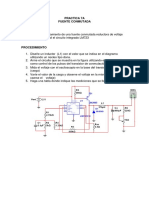
- Practica 7a Fuente Conmutada Con Lm723Documento1 páginaPractica 7a Fuente Conmutada Con Lm723msioneroAún no hay calificaciones
- Ejercicios Lógica CombinacionalDocumento1 páginaEjercicios Lógica CombinacionalBecker Orlando Perez FIallosAún no hay calificaciones
- Calculo de La Seccion Del Conductor Por Caida de TensionDocumento3 páginasCalculo de La Seccion Del Conductor Por Caida de Tensiondiana queralezAún no hay calificaciones
- Faja TransportadoraDocumento21 páginasFaja TransportadoraDavid Ninaquispe Bardales100% (1)
- Multi SimDocumento2 páginasMulti SimalexAún no hay calificaciones
- Informe Practica Final FPGADocumento15 páginasInforme Practica Final FPGASilvi SilvidosAún no hay calificaciones
- Unidad I Conceptos Básicos de ControlDocumento12 páginasUnidad I Conceptos Básicos de ControlEugenio PelaezAún no hay calificaciones
- Ejercicios Flip FlopDocumento2 páginasEjercicios Flip FlopguideahonAún no hay calificaciones
- Lab01 IntroductiontoLatex Matlab PDFDocumento6 páginasLab01 IntroductiontoLatex Matlab PDFJëfërsön CruzAún no hay calificaciones
- Motor DCDocumento18 páginasMotor DCharold steve saez alfonsoAún no hay calificaciones
- Algebra de BooleDocumento64 páginasAlgebra de BoolemanuelAún no hay calificaciones
- Impedancia de Circuitos RC y RLDocumento7 páginasImpedancia de Circuitos RC y RLElnatan Torres GonzalezAún no hay calificaciones
- Informe Practica Programación, Simulación y Construcción de Luces de "Auto Fantástico"Documento4 páginasInforme Practica Programación, Simulación y Construcción de Luces de "Auto Fantástico"Josue SanangoAún no hay calificaciones
- Alarma Con LaserDocumento6 páginasAlarma Con LaserMario Nuñez50% (2)
- CUESTIONARIO PREVIO N°7 (QUINTANA, JOHN)Documento17 páginasCUESTIONARIO PREVIO N°7 (QUINTANA, JOHN)John QuintanaAún no hay calificaciones
- 4 DinámicaDocumento19 páginas4 DinámicaCarlos Avilés100% (1)
- Clase Practica 2 IIDocumento6 páginasClase Practica 2 IISamus 119Aún no hay calificaciones
- Calculos Con La Tabla de ErlangsDocumento2 páginasCalculos Con La Tabla de ErlangsLuis LópezAún no hay calificaciones
- Atenuador 5dbiDocumento9 páginasAtenuador 5dbiHéctor RosalesAún no hay calificaciones
- Exámen Electronica Aplicada 10-11-16Documento2 páginasExámen Electronica Aplicada 10-11-16Alfon CarrAún no hay calificaciones
- Tutorial 22 - Modulo Fotorresistencia KY-018Documento2 páginasTutorial 22 - Modulo Fotorresistencia KY-018Antonio Navarrete100% (1)
- Proyecto (Luz Intermitente) Con 555Documento5 páginasProyecto (Luz Intermitente) Con 555Yorve Hernandez100% (1)
- Ee-615 Control ISYLLABUSDocumento2 páginasEe-615 Control ISYLLABUSjoserxAún no hay calificaciones
- Medición de Potencia y AtenuaciónDocumento6 páginasMedición de Potencia y AtenuaciónTazann24Aún no hay calificaciones
- Contador FotoelectricoDocumento4 páginasContador FotoelectricoDavid BedoyaAún no hay calificaciones
- 2.5 Tecnicas Análisis de Circuitos Utilizando FasoresDocumento10 páginas2.5 Tecnicas Análisis de Circuitos Utilizando FasoresTania Vargas toledoAún no hay calificaciones
- Formulario Cálculo Sección Línea BT - v1Documento1 páginaFormulario Cálculo Sección Línea BT - v1hmor3100% (1)
- Generador de Van de Graaff ProyectoDocumento18 páginasGenerador de Van de Graaff ProyectoJf-DeejayPopayanAún no hay calificaciones
- Filtrado MACDocumento8 páginasFiltrado MACLuisa Donay Mayo SanchezAún no hay calificaciones
- Filtro Activo Pasabajos ButterworthDocumento6 páginasFiltro Activo Pasabajos ButterworthArmando Vázquez RamírezAún no hay calificaciones
- Acopladores Direccionales y CirculadoresDocumento21 páginasAcopladores Direccionales y CirculadoresIsrael SanzAún no hay calificaciones
- Laboratorio de Máquinas Eléctricas IDocumento7 páginasLaboratorio de Máquinas Eléctricas IcarlosmorgadohdzAún no hay calificaciones
- Telefonia Practica 2Documento12 páginasTelefonia Practica 2Sebastian MayorgaAún no hay calificaciones
- Equipos Informáticos DomésticosDocumento6 páginasEquipos Informáticos DomésticosJose Luis VillacrésAún no hay calificaciones
- La Ley de Ohm y Medida de La Corriente y El Voltaje en Un Circuito en Serie y en Un Circuito en ParaleloDocumento38 páginasLa Ley de Ohm y Medida de La Corriente y El Voltaje en Un Circuito en Serie y en Un Circuito en ParaleloDilsa Angelica Angulo75% (4)
- Instalacion de Arduino LM35 Dimmer RobotdynDocumento32 páginasInstalacion de Arduino LM35 Dimmer RobotdynGiordano García100% (1)
- Simuladores de Robots - Jhannifer FDocumento10 páginasSimuladores de Robots - Jhannifer FJhannifer100% (1)
- ReporteDocumento23 páginasReporteFrancisco Guadalupe Uc CanAún no hay calificaciones
- Ensayo Num RoboticaqDocumento2 páginasEnsayo Num RoboticaqByron IdrovoAún no hay calificaciones
- Previo 4Documento3 páginasPrevio 4Alvin Del Valle BenitezAún no hay calificaciones
- Sistema de Control Mediante Python-Informe#2Documento15 páginasSistema de Control Mediante Python-Informe#2Luis MiguelAún no hay calificaciones
- Una Introducción A Los Robots MóvilesDocumento86 páginasUna Introducción A Los Robots Móvilespaul_tinizaray100% (1)
- Caracterisiticas de Los Polos de Un ContactorDocumento5 páginasCaracterisiticas de Los Polos de Un ContactorHugo Fernando JachoAún no hay calificaciones
- Timer 555Documento15 páginasTimer 555oconer51Aún no hay calificaciones
- Preguntas Del RetilapDocumento8 páginasPreguntas Del RetilapFavio Andres Bolaños AraujoAún no hay calificaciones
- Robot InsectoDocumento35 páginasRobot InsectoMiguel AngelAún no hay calificaciones
- Tarea 1 Infografía Comunicaciones en PLCDocumento1 páginaTarea 1 Infografía Comunicaciones en PLCJuan Pablo FernándezAún no hay calificaciones
- PRACTICA 1 Equipamiento Del Laboratorio de TelecomunicacionesDocumento18 páginasPRACTICA 1 Equipamiento Del Laboratorio de TelecomunicacionesJhony SiguenzaAún no hay calificaciones
- Partes de NI ELVIS IIDocumento13 páginasPartes de NI ELVIS IIKatty Pinto100% (1)
- Práctica 7 (CCD, Ramirez)Documento8 páginasPráctica 7 (CCD, Ramirez)Carlos RamirezAún no hay calificaciones
- Maquet ADocumento9 páginasMaquet ARicardo ramirezAún no hay calificaciones
- ServomotorDocumento16 páginasServomotorJuan Luis EspinozaAún no hay calificaciones
- Electronicafinal PDFDocumento9 páginasElectronicafinal PDFA L E X0% (1)
- DA Act 13. Casa AutomatizadaDocumento8 páginasDA Act 13. Casa AutomatizadaLaura FhernandaAún no hay calificaciones
- Arduino para PrincipiantesDe EverandArduino para PrincipiantesCalificación: 3.5 de 5 estrellas3.5/5 (21)
- Formato Libreta Escolar 2021Documento13 páginasFormato Libreta Escolar 2021Christian Tilca QuispeAún no hay calificaciones
- Clasificacion EmpresasDocumento4 páginasClasificacion EmpresasSuAsesorAún no hay calificaciones
- Castillo Abelardo - Also Sprach El Señor Nuñez PDFDocumento10 páginasCastillo Abelardo - Also Sprach El Señor Nuñez PDFlsvvAún no hay calificaciones
- Citologia I PDFDocumento5 páginasCitologia I PDFCésar ChávezAún no hay calificaciones
- LaboralesDocumento24 páginasLaboralesGaddy ValdesAún no hay calificaciones
- Metrados-San-Sesion 5-Tarea-1.4Documento4 páginasMetrados-San-Sesion 5-Tarea-1.4CRISTIAN DEYVI VALENCIA SEGUNDOAún no hay calificaciones
- PEIDocumento29 páginasPEIWILSON LOPEZ LORENZOAún no hay calificaciones
- Solicitud de Estancias Formativas para Residentes Externos S, N.SDocumento3 páginasSolicitud de Estancias Formativas para Residentes Externos S, N.SIsabel TorresAún no hay calificaciones
- Alberto Picerno - Ingeniero - PROBADOR DE CADENAS DE LEDDocumento6 páginasAlberto Picerno - Ingeniero - PROBADOR DE CADENAS DE LEDDiego García Medina100% (1)
- Publicaciones, Tesis, Etc. para Proyecto (Secado de Placas Aislantes de Yeso Con Poliestireno Expandido Utilizando Un Colector Solar de Placa Plana)Documento16 páginasPublicaciones, Tesis, Etc. para Proyecto (Secado de Placas Aislantes de Yeso Con Poliestireno Expandido Utilizando Un Colector Solar de Placa Plana)Fernando MottaAún no hay calificaciones
- 1.quién Dijo Que La Comunicación Era FácilDocumento7 páginas1.quién Dijo Que La Comunicación Era FácilYeidi milena Cano agudeloAún no hay calificaciones
- Trabajo de Construccion Del PeicDocumento9 páginasTrabajo de Construccion Del PeicMILEIDY PALENCIAAún no hay calificaciones
- Tumores OseosDocumento12 páginasTumores OseosPablo SejasAún no hay calificaciones
- Pozo Gordon-U. Cuenca-Realidades Comercio Exterior Ecuatoriano-170Documento170 páginasPozo Gordon-U. Cuenca-Realidades Comercio Exterior Ecuatoriano-170Marta Donoso LlanosAún no hay calificaciones
- Metodo de Sucs ExposicionDocumento21 páginasMetodo de Sucs ExposicionYULINO RAMOS MIRAVALAún no hay calificaciones
- Película 300 MetrosDocumento2 páginasPelícula 300 MetrosCarla Ramírez corbiAún no hay calificaciones
- Que Es La Filosofia Trabajo Practico 1Documento2 páginasQue Es La Filosofia Trabajo Practico 1gretelAún no hay calificaciones
- Green GasDocumento11 páginasGreen Gasluis romeroAún no hay calificaciones
- Actividad Virtual N°2 - Revisión de IntentosDocumento26 páginasActividad Virtual N°2 - Revisión de IntentosMIJAIL FRANK RICALDI CARHUARICRAAún no hay calificaciones
- Guia 1 - Organismos Unicelulares PDFDocumento2 páginasGuia 1 - Organismos Unicelulares PDFpaolaAún no hay calificaciones
- Obtener Rayo Solar en Perspectiva MilitarDocumento9 páginasObtener Rayo Solar en Perspectiva MilitarAntonio Pablo CruzAún no hay calificaciones
- NTC 4532 Transporte de Mercancías Peligrosas. Tarjetas de Emergencia PDFDocumento62 páginasNTC 4532 Transporte de Mercancías Peligrosas. Tarjetas de Emergencia PDFLuis Fernando Medina LeguízamoAún no hay calificaciones
- GG01 - Gestión y Gerencia PúblicaDocumento443 páginasGG01 - Gestión y Gerencia PúblicaÁLvaro Salsavilca CayetanoAún no hay calificaciones
- Texto Expositivo 2023Documento19 páginasTexto Expositivo 2023Walter Garzón VillalbaAún no hay calificaciones
- Descuento Por Pronto PagoDocumento2 páginasDescuento Por Pronto PagoPaola IbarraAún no hay calificaciones
- Ayudantía 2306 - Repaso Prueba 3Documento11 páginasAyudantía 2306 - Repaso Prueba 3Laura CataAún no hay calificaciones
- Tipos de BacteriasDocumento2 páginasTipos de BacteriasJuan Carlos MartinezAún no hay calificaciones
- 2da Practica Tecnologia de FluidosDocumento2 páginas2da Practica Tecnologia de FluidosJean Pierre Carranza CavaniAún no hay calificaciones
- Municipio Escolar TripticoDocumento2 páginasMunicipio Escolar TripticoFarráh MejiaAún no hay calificaciones