También podría gustarte
- Formulario CompletoDocumento2 páginasFormulario Completocarolina valdezAún no hay calificaciones
- FORMULACIÓN ONDAS y OPTICADocumento3 páginasFORMULACIÓN ONDAS y OPTICAjuanluisrondanAún no hay calificaciones
- FórmulasDocumento3 páginasFórmulasFabiola RamírezAún no hay calificaciones
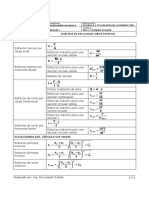
- Formulario Resistencia de Los Materiales-Parcial2Documento3 páginasFormulario Resistencia de Los Materiales-Parcial2Basilio HuancaAún no hay calificaciones
- Formulario Tema 1 PDFDocumento11 páginasFormulario Tema 1 PDFoscarAún no hay calificaciones
- Distintos Tipos de Esfuerzos Normales y CortantesDocumento3 páginasDistintos Tipos de Esfuerzos Normales y CortantesLeuri RincónAún no hay calificaciones
- Apuntes Básicos RdeMat. V4Documento30 páginasApuntes Básicos RdeMat. V4Agustina RamosAún no hay calificaciones
- Mapa Parcial 2Documento1 páginaMapa Parcial 2Isa DautAún no hay calificaciones
- FORMULARIODocumento6 páginasFORMULARIOStevens DamazoAún no hay calificaciones
- Flexion Simple VF PDFDocumento9 páginasFlexion Simple VF PDFKashitokatatemo100% (1)
- Movimiento Armónico Simple Energía Del MAS: Unidad de Aprendizaje 2Documento28 páginasMovimiento Armónico Simple Energía Del MAS: Unidad de Aprendizaje 2manuel417726Aún no hay calificaciones
- RMI - Unidad IV - Parte 3 Deflexión en La Flexión Rev1Documento31 páginasRMI - Unidad IV - Parte 3 Deflexión en La Flexión Rev1Giannina FernandezAún no hay calificaciones
- Formulario de Oscilaciones y OndasDocumento3 páginasFormulario de Oscilaciones y OndasAlejandra Guzmán100% (1)
- RESUMEN DE FÓRMULAS MyMDocumento1 páginaRESUMEN DE FÓRMULAS MyMFelipe DuarteAún no hay calificaciones
- Cepreunh 591432Documento2 páginasCepreunh 591432One Dany Huincho QuispeAún no hay calificaciones
- Formulario CinematicaDocumento1 páginaFormulario CinematicaYom OisAún no hay calificaciones
- Tensiones en La Roca: TridimensionalDocumento7 páginasTensiones en La Roca: TridimensionalRoberto GarcíaAún no hay calificaciones
- Presentaciónb2temaiv20 - 21 2Documento23 páginasPresentaciónb2temaiv20 - 21 2Antonio Guerrero DorantesAún no hay calificaciones
- soloEXAMEN U6 MMA - BDocumento3 páginassoloEXAMEN U6 MMA - Bmario verdiguelAún no hay calificaciones
- UntitledDocumento6 páginasUntitledNathalie Alejandra Valenzuela CachicasAún no hay calificaciones
- Mat 1207 - CoefDocumento15 páginasMat 1207 - CoefGuelia MartinezAún no hay calificaciones
- Formulario de Geometría AnalíticaDocumento4 páginasFormulario de Geometría AnalíticaLuis Jorge Maldonado RincónAún no hay calificaciones
- E11flexs 2009-10 PDFDocumento40 páginasE11flexs 2009-10 PDFfronendAún no hay calificaciones
- PDF Formulario Tema 1 PDF - CompressDocumento11 páginasPDF Formulario Tema 1 PDF - CompressJuan Gerardo Maldonado CalderaAún no hay calificaciones
- Aplicaciones de La Integral Doble y TripleDocumento5 páginasAplicaciones de La Integral Doble y TripleAndrés Arturo Fernández GranadilloAún no hay calificaciones
- Formulario C1Documento4 páginasFormulario C1Francisco MoraAún no hay calificaciones
- Formulas RMDocumento1 páginaFormulas RMSara LópezAún no hay calificaciones
- Vibraciones Mecánicas CRD9 McontDocumento41 páginasVibraciones Mecánicas CRD9 McontDariel GomezAún no hay calificaciones
- Trigonometría Guía 3 Anual 2023-12-1Documento3 páginasTrigonometría Guía 3 Anual 2023-12-1Rodry Maní turpoAún no hay calificaciones
- 3.4 - Deformacion Por CorteDocumento6 páginas3.4 - Deformacion Por CorteC7PROYECTOSAún no hay calificaciones
- Ayudantía 2 ControlDocumento5 páginasAyudantía 2 Controlconita1orianaAún no hay calificaciones
- Movimiento OscilatorioDocumento19 páginasMovimiento OscilatorioHugo Alberto Choque AlconAún no hay calificaciones
- Parcial 4 Resistencia de MaterialesDocumento2 páginasParcial 4 Resistencia de Materialesfelipe.piedrahita1Aún no hay calificaciones
- S03 - s2-MOVIMIENTO ARMÓNICO AMORTIGUADO Y FORZADODocumento17 páginasS03 - s2-MOVIMIENTO ARMÓNICO AMORTIGUADO Y FORZADOphaola.aguilarAún no hay calificaciones
- Formulario Cinemática y DinámicaDocumento10 páginasFormulario Cinemática y DinámicaRodolfo RamirezAún no hay calificaciones
- Formulas Propiedades Geo PERF WDocumento2 páginasFormulas Propiedades Geo PERF WLeonardo ZambranoAún no hay calificaciones
- Oscilaciones Libres 20-21Documento23 páginasOscilaciones Libres 20-21Adriana MorozAún no hay calificaciones
- Esfuerzo de FlexiónDocumento19 páginasEsfuerzo de FlexiónFU BAAún no hay calificaciones
- Formulas Propiedades Geo PERF HSSDocumento2 páginasFormulas Propiedades Geo PERF HSSLeonardo ZambranoAún no hay calificaciones
- Principio de Trabajo Virtual InternoDocumento2 páginasPrincipio de Trabajo Virtual InternonicolasAún no hay calificaciones
- 01 07 ConceptosBásicosÁlgebraDocumento3 páginas01 07 ConceptosBásicosÁlgebraminuch00newsAún no hay calificaciones
- 1.1 Consideraciones EstadisticasDocumento24 páginas1.1 Consideraciones EstadisticasGUIDO RAFAEL TORRES MUÑOZAún no hay calificaciones
- Resumen Completo Mecánica de Máquinas - UC3MDocumento7 páginasResumen Completo Mecánica de Máquinas - UC3MCésar BarrioAún no hay calificaciones
- Tema - 2 Fundamentos de Mecanica de Rocas PDFDocumento59 páginasTema - 2 Fundamentos de Mecanica de Rocas PDFJuan Carlos Moreno BasilioAún no hay calificaciones
- Aa - Cinemática - Balota #03Documento54 páginasAa - Cinemática - Balota #03fredyAún no hay calificaciones
- Formulario Primera UnidadDocumento2 páginasFormulario Primera UnidadORTIZ VACA ALFREDO YAHIRAún no hay calificaciones
- Tema 21 - Funciones Trigonométricas Inversas II - Trazado de GráficasDocumento4 páginasTema 21 - Funciones Trigonométricas Inversas II - Trazado de GráficasJhoan Heiner Fabian CristobalAún no hay calificaciones
- Tema 21 - Funciones Trigonométricas Inversas II - Trazado de GráficasDocumento4 páginasTema 21 - Funciones Trigonométricas Inversas II - Trazado de GráficasandersonAún no hay calificaciones
- Cinematica 2 - Fisica 2023-IIDocumento20 páginasCinematica 2 - Fisica 2023-IICristopher Renato Roncal AlvaradoAún no hay calificaciones
- Física IIDocumento14 páginasFísica IIJuan Andres HamdannAún no hay calificaciones
- Fórmulas Movimiento OndulatorioDocumento2 páginasFórmulas Movimiento OndulatorioStefanyAún no hay calificaciones
- Fórmulas Movimiento OndulatorioDocumento2 páginasFórmulas Movimiento OndulatorioStefanyAún no hay calificaciones
- Movimiento OscilatorioDocumento28 páginasMovimiento OscilatorioHELEN STACY AQUICE MIRANDA100% (1)
- Fórmulas Fisica PDFDocumento3 páginasFórmulas Fisica PDFchristian cardonaAún no hay calificaciones
- Formulario Movimiento Armónico SimpleDocumento1 páginaFormulario Movimiento Armónico SimpleXavier ZamoraAún no hay calificaciones
- Fórmulas PDFDocumento3 páginasFórmulas PDFTaiyoFurukawaAún no hay calificaciones
- BALOTA Nro 3-CINEMÁTICA GRUPOS "A" Y "B" CICLO 2021 - IDocumento43 páginasBALOTA Nro 3-CINEMÁTICA GRUPOS "A" Y "B" CICLO 2021 - IfredyAún no hay calificaciones
- Mov Armonico Simple RealDocumento29 páginasMov Armonico Simple RealMarlon Alejandro GutierrezAún no hay calificaciones
- UNIDAD 5 Esfuerzos en Vigas-II ParteDocumento51 páginasUNIDAD 5 Esfuerzos en Vigas-II PartePiero Axel Chalco EstradaAún no hay calificaciones
- Simulación Con Metodología Delta T ConstanteDocumento20 páginasSimulación Con Metodología Delta T ConstanteMarisolAún no hay calificaciones
- Instructivo de Emplantillado FundacionesDocumento4 páginasInstructivo de Emplantillado FundacionesPILI PONCEAún no hay calificaciones
- Investigacion de Mercados Parte 2Documento21 páginasInvestigacion de Mercados Parte 2Anthony SalasAún no hay calificaciones
- Dr. Hippie - Guia de CultivoDocumento17 páginasDr. Hippie - Guia de CultivoBas Tian100% (1)
- Maquinas para El Transporte de Maquinarias y MaterialesDocumento85 páginasMaquinas para El Transporte de Maquinarias y Materialesingdnhelly50% (2)
- Cap2 Cajas Aislantes para IcpDocumento12 páginasCap2 Cajas Aislantes para IcpDaniel RojasAún no hay calificaciones
- Unidad 1 Ingeniería EconómicaDocumento12 páginasUnidad 1 Ingeniería EconómicaGUSTAVO ADOLFOAún no hay calificaciones
- EcgDocumento1 páginaEcgCANELO_PIANOAún no hay calificaciones
- InformeDocumento6 páginasInformeKevin Dayan Lopez PortillaAún no hay calificaciones
- 2022 Examen Excel Dic MarelyDocumento346 páginas2022 Examen Excel Dic MarelyVictor Lopez PatiñoAún no hay calificaciones
- Informe Final de Proyecto de Cine en VisualDocumento67 páginasInforme Final de Proyecto de Cine en VisualleslyAún no hay calificaciones
- CATALOGO DE CONCEPTOS VIVIENDA CADIZ Con CantidadesDocumento13 páginasCATALOGO DE CONCEPTOS VIVIENDA CADIZ Con CantidadesJESUS EMILIO VERA CAAMALAún no hay calificaciones
- S 8 T Rentas Diferidas-2020Documento13 páginasS 8 T Rentas Diferidas-2020Adriano SC0% (1)
- 1 ° Guia 9° VectoresDocumento11 páginas1 ° Guia 9° VectoresMejia Rojas LuisAún no hay calificaciones
- CKUBDocumento21 páginasCKUBIng Rodolfo OlguinAún no hay calificaciones
- Cuaderno de Informes-Semana 4Documento49 páginasCuaderno de Informes-Semana 4Ana Melva Tuñoque tumez100% (2)
- Conceptos de OclusionDocumento3 páginasConceptos de OclusiondanielaAún no hay calificaciones
- Madre MonteDocumento1 páginaMadre MonteElizabet Guardado duranAún no hay calificaciones
- Act de Apred Mat. 09. 06 .21.Documento3 páginasAct de Apred Mat. 09. 06 .21.Torres Yupanqui NEAún no hay calificaciones
- jw-cc-ft-011 Detergente en Polvo El Macho ProfesionalDocumento2 páginasjw-cc-ft-011 Detergente en Polvo El Macho ProfesionalandresAún no hay calificaciones
- Smog FotoquímicoDocumento15 páginasSmog FotoquímicoJorch QuispeAún no hay calificaciones
- Flujo de Caja y FCLDocumento4 páginasFlujo de Caja y FCLosvaldo alvarezAún no hay calificaciones
- Análisis de Relacion Beneficio Vs CostoDocumento11 páginasAnálisis de Relacion Beneficio Vs CostoManuelAlejandroRojasCubillosAún no hay calificaciones
- Plan de Reduccion de Riesgos de SololaDocumento127 páginasPlan de Reduccion de Riesgos de SololadanielpozuelosAún no hay calificaciones
- Aprendiendo JlexDocumento17 páginasAprendiendo JlexCristian FiremanAún no hay calificaciones
- Proyecto Inv HuracanesDocumento14 páginasProyecto Inv HuracanesLenin LopezAún no hay calificaciones
- Geotecnia de San SebastianDocumento38 páginasGeotecnia de San SebastianWily Sarmiento YucraAún no hay calificaciones
- Bases de CardiologiaDocumento2 páginasBases de Cardiologiajuan godinezAún no hay calificaciones
- 4 Taller 1 Tecno Grado 9 Introducción A Coding For KidsDocumento9 páginas4 Taller 1 Tecno Grado 9 Introducción A Coding For KidsAugusto FernandezAún no hay calificaciones
- Psicoterapia Cognitivo AnalíticaDocumento12 páginasPsicoterapia Cognitivo AnalíticaldelblancodiezAún no hay calificaciones