También podría gustarte
- GD11 - Semana 3Documento14 páginasGD11 - Semana 3Andrea Guadalupe Aguilar CañasAún no hay calificaciones
- S11Documento5 páginasS11Veronica SibajaAún no hay calificaciones
- Solución QuizDocumento3 páginasSolución QuizJheisy Jhireth AyalaAún no hay calificaciones
- Propiedades SumatoriasDocumento2 páginasPropiedades SumatoriasSebastian GuarinAún no hay calificaciones
- Repaso Final Pc2Documento16 páginasRepaso Final Pc2Superjose 957Aún no hay calificaciones
- S3 Campo EléctricoDocumento7 páginasS3 Campo EléctricoVeronica SibajaAún no hay calificaciones
- Formulario Est. FinalDocumento2 páginasFormulario Est. FinalALEJANDRAAún no hay calificaciones
- Microeconomía Greatest HitsDocumento36 páginasMicroeconomía Greatest HitsPablo GuitartAún no hay calificaciones
- Apuntes Tema 1 y 2 Métodos VDocumento11 páginasApuntes Tema 1 y 2 Métodos VCarol CachaldoraAún no hay calificaciones
- Semana 6Documento9 páginasSemana 6Ronald PerdomoAún no hay calificaciones
- Formularioexamenparcial - 02 11 2024Documento2 páginasFormularioexamenparcial - 02 11 2024ALEJANDRAAún no hay calificaciones
- Teoría-Analisis Matematico IIDocumento171 páginasTeoría-Analisis Matematico IIpaktuvAún no hay calificaciones
- Ejercicio 1 Pregunta 4Documento1 páginaEjercicio 1 Pregunta 4jhonattan ulloaAún no hay calificaciones
- Parcial EsDocumento3 páginasParcial EsAlex AlayAún no hay calificaciones
- Cálculo Diferencial e IntegralDocumento11 páginasCálculo Diferencial e IntegralValeria AndradeAún no hay calificaciones
- Taller PDFDocumento16 páginasTaller PDFMARIA CAMILA MUÑOZ MUÑOZAún no hay calificaciones
- Fórmulas Fisica PDFDocumento3 páginasFórmulas Fisica PDFchristian cardonaAún no hay calificaciones
- Fórmulas PDFDocumento3 páginasFórmulas PDFTaiyoFurukawaAún no hay calificaciones
- Pauta - Control - 4 - IN1005C - Forma B - 2016 - 2Documento1 páginaPauta - Control - 4 - IN1005C - Forma B - 2016 - 2Ani TroncosoAún no hay calificaciones
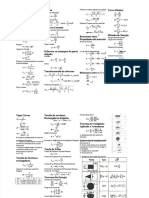
- ff2 Formulario 20 05 2009Documento2 páginasff2 Formulario 20 05 2009m,narAún no hay calificaciones
- Guia 06Documento7 páginasGuia 06JESUS ROLANDO FIGUEROA CAMPANAAún no hay calificaciones
- Resumen C1Documento13 páginasResumen C1axel.cona2201Aún no hay calificaciones
- Pizarra Invope I LM 2023-2 m1Documento4 páginasPizarra Invope I LM 2023-2 m1j.ladera303Aún no hay calificaciones
- Clase 3Documento9 páginasClase 3Sebas Orozco MAún no hay calificaciones
- Asig. Calculo P. 203 (1-25) I PDFDocumento5 páginasAsig. Calculo P. 203 (1-25) I PDFValeria RodriguezAún no hay calificaciones
- Resumen Teorico para La Guia 2-2018Documento8 páginasResumen Teorico para La Guia 2-2018nancyAún no hay calificaciones
- Mat 1207 - CoefDocumento15 páginasMat 1207 - CoefGuelia MartinezAún no hay calificaciones
- 3 - Funciones HolomorfasDocumento20 páginas3 - Funciones HolomorfasDaniel Lacosta RamosAún no hay calificaciones
- Ejercicio Resuelto de Estimador Máximo VerosímilDocumento2 páginasEjercicio Resuelto de Estimador Máximo VerosímilFabiánAndrésPérezAún no hay calificaciones
- FórmulasDocumento3 páginasFórmulasFabiola RamírezAún no hay calificaciones
- Soluciones Control SuperficiesDocumento5 páginasSoluciones Control SuperficiesMiguiAún no hay calificaciones
- ÓpticaDocumento122 páginasÓpticaAlejandro Guarin ValderramaAún no hay calificaciones
- Formulario Primera Prueba MT438Documento2 páginasFormulario Primera Prueba MT438Dawson AbigailAún no hay calificaciones
- Integración MúltipleDocumento55 páginasIntegración MúltipleAMYNNXXXX100% (1)
- Formulario C1Documento4 páginasFormulario C1Francisco MoraAún no hay calificaciones
- Ayudantía 1 PautaDocumento7 páginasAyudantía 1 PautaIgnaciia VegaAún no hay calificaciones
- Taller Preapacial 1Documento2 páginasTaller Preapacial 1Juan David Bazurdo CastañedaAún no hay calificaciones
- Formulario de SumatoriasDocumento4 páginasFormulario de SumatoriasWilmer MartinezAún no hay calificaciones
- Algebra TrigonometriaDocumento3 páginasAlgebra Trigonometriaban 92 anaAún no hay calificaciones
- 01 Guía N°01 (Integrales Indefinidas)Documento5 páginas01 Guía N°01 (Integrales Indefinidas)Alexander Patricio Escobar PintoAún no hay calificaciones
- Actividades de Derivación ImplicitaDocumento5 páginasActividades de Derivación ImplicitaJuan Manuel De los santosAún no hay calificaciones
- Teoría y Ejercicios ParámetrosDocumento5 páginasTeoría y Ejercicios ParámetrosDaniela De Zarraga MartinAún no hay calificaciones
- X Sem23Documento9 páginasX Sem23antonioAún no hay calificaciones
- Semana 12aDocumento166 páginasSemana 12aJosue Romero FAún no hay calificaciones
- Τύποι Μαθ2Documento1 páginaΤύποι Μαθ2txsyykcgmqAún no hay calificaciones
- Auturo: VariableDocumento32 páginasAuturo: VariableUriel Larrea CAún no hay calificaciones
- Problemas de Límites 2Documento6 páginasProblemas de Límites 2Alicia SantiagoAún no hay calificaciones
- Tarea 6.Documento14 páginasTarea 6.Oscar A. LuévanoAún no hay calificaciones
- DN-0341 Formulario Temas III y IVDocumento1 páginaDN-0341 Formulario Temas III y IVPenélope VargasAún no hay calificaciones
- EconometríaDocumento3 páginasEconometríaJoseph Huisacayna SanaAún no hay calificaciones
- Clasificacion de Las Funciones1Documento1 páginaClasificacion de Las Funciones1Olga Lucia Figueroa Sierra100% (1)
- Test - 3 V3 PautaDocumento3 páginasTest - 3 V3 PautaJuanAún no hay calificaciones
- Formulario Segundo ParcialDocumento2 páginasFormulario Segundo Parcialryebcn14Aún no hay calificaciones
- Wiac - Info PDF Formulas Mecanica de Materiales PRDocumento3 páginasWiac - Info PDF Formulas Mecanica de Materiales PRhecor miguelAún no hay calificaciones
- Resumen ExamenDocumento4 páginasResumen ExamenangelicaAún no hay calificaciones
- This Study Resource Was: Universidad T Ecnica Federico Santa Mar Ia Pauta 2 Certamen MAT021Documento5 páginasThis Study Resource Was: Universidad T Ecnica Federico Santa Mar Ia Pauta 2 Certamen MAT021Jorge PeraltaAún no hay calificaciones
- Tarea Reg PDFDocumento5 páginasTarea Reg PDFJorge PontonAún no hay calificaciones
- EstimacionesDocumento5 páginasEstimacionesCésar Salinas RodríguezAún no hay calificaciones
- 1.teoría de Exponentes y Ecuación ExponencialDocumento1 página1.teoría de Exponentes y Ecuación ExponencialJhferson Adrián TeranAún no hay calificaciones
- Ortografia Basica de La Lengua EspañolaDocumento6 páginasOrtografia Basica de La Lengua EspañolaBRAYAN JENS LOPEZ MENDOZAAún no hay calificaciones
- Keratina Artesanal CompletadoDocumento23 páginasKeratina Artesanal CompletadoElis Rose100% (13)
- COMBUSTIÃ - N INTERNA para MOT2Documento15 páginasCOMBUSTIÃ - N INTERNA para MOT2cristiannnooo100% (1)
- 17 El Tema 5. Teoria. Ejercicios y Problemas Resueltos y para Resolver. (P. 319 A 383) PDFDocumento65 páginas17 El Tema 5. Teoria. Ejercicios y Problemas Resueltos y para Resolver. (P. 319 A 383) PDFLucia Bonilla VaraAún no hay calificaciones
- Ejercicio de Balance 1Documento8 páginasEjercicio de Balance 1ELIAún no hay calificaciones
- 3 Atomos y MoleculasDocumento27 páginas3 Atomos y MoleculasJavier LopezAún no hay calificaciones
- Poligono CUARTO 2021Documento11 páginasPoligono CUARTO 2021MARIMORRIS 006Aún no hay calificaciones
- Dgfa Aprendizajes Esenciales BGDocumento39 páginasDgfa Aprendizajes Esenciales BGRigoberto FloresAún no hay calificaciones
- Cuestionario Final (Electricidad y Magnetismo)Documento4 páginasCuestionario Final (Electricidad y Magnetismo)DaveAún no hay calificaciones
- Muest RaDocumento60 páginasMuest Rabismar jaramillo orellanaAún no hay calificaciones
- CalcinacionDocumento12 páginasCalcinacionRuben Kapa TiconaAún no hay calificaciones
- MANUALUSUARIO Refri LGDocumento10 páginasMANUALUSUARIO Refri LGArnulfo Rivera Espinoza0% (1)
- Practica de Laboratorio N°5 ENLACE QUIMICODocumento17 páginasPractica de Laboratorio N°5 ENLACE QUIMICOOlmedo Aedo Huyhua AcevedoAún no hay calificaciones
- 5.1 Caida Libre de CuerposDocumento10 páginas5.1 Caida Libre de CuerposMaria Fernanda Contreras BeltranAún no hay calificaciones
- Terapia AcuaticaDocumento2 páginasTerapia AcuaticaAngie CortesAún no hay calificaciones
- 2691 - MATEMÁTICA II - I2AB - 00 - CT - 2 - 2020-2 - Aldonza Santa Cruz MendozaDocumento5 páginas2691 - MATEMÁTICA II - I2AB - 00 - CT - 2 - 2020-2 - Aldonza Santa Cruz Mendozadavid minchan pompaAún no hay calificaciones
- Suarez - HSY Concreto Reforzado Con Plumas de Aves PDFDocumento101 páginasSuarez - HSY Concreto Reforzado Con Plumas de Aves PDFDavid VilcaAún no hay calificaciones
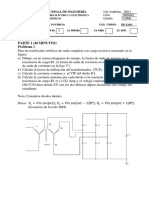
- PC2 Ee532 - Fiee UniDocumento3 páginasPC2 Ee532 - Fiee UniDavidAún no hay calificaciones
- Líquidos y SolucionesDocumento38 páginasLíquidos y SolucionesYamile Mauriel GonzálezAún no hay calificaciones
- MolyneuxDocumento28 páginasMolyneuxJulian RodriguezAún no hay calificaciones
- 12-TP7 - Fibras OpticasDocumento2 páginas12-TP7 - Fibras Opticasjax pkAún no hay calificaciones
- Taquimetria 2 Sem 2018Documento25 páginasTaquimetria 2 Sem 2018MATIAS CUBILLOSAún no hay calificaciones
- Metodo de Las FuerzasDocumento31 páginasMetodo de Las FuerzasJean Carlos Meza PalominoAún no hay calificaciones
- Método PepsDocumento5 páginasMétodo Pepswillie almanzarAún no hay calificaciones
- Tren Semiejes Flotantes y RgidosDocumento7 páginasTren Semiejes Flotantes y RgidosIsrael Pardo PalaciosAún no hay calificaciones
- Propuesta de Investigación de MercadosDocumento1 páginaPropuesta de Investigación de MercadosMauricio OrozcoAún no hay calificaciones
- EXAMEN 2 - Ing Electronica PDFDocumento2 páginasEXAMEN 2 - Ing Electronica PDFCristian SotoAún no hay calificaciones
- Materiales de Construcción. Informe 7Documento20 páginasMateriales de Construcción. Informe 7Alexander Gutierrez100% (1)
- Transformada de FourierDocumento4 páginasTransformada de FourierDavid OlayaAún no hay calificaciones
- Examen CognitivaDocumento6 páginasExamen Cognitivajecsy100% (3)