También podría gustarte
- Introducción a los Algoritmos y las Estructuras de Datos 2: Introducción a los Algoritmos y las Estructuras de Datos, #2De EverandIntroducción a los Algoritmos y las Estructuras de Datos 2: Introducción a los Algoritmos y las Estructuras de Datos, #2Aún no hay calificaciones
- Prácticas Con Arduino Nivel I BDocumento72 páginasPrácticas Con Arduino Nivel I Bfdcg 16Aún no hay calificaciones
- CapacitorDocumento67 páginasCapacitorAndrés Garcés CAún no hay calificaciones
- Fpga JCHLDocumento21 páginasFpga JCHLAntony Stip Flores TorresAún no hay calificaciones
- Diseño de Circuitos Logicos CombinacionalesDocumento16 páginasDiseño de Circuitos Logicos Combinacionalesivan andres ceron solarteAún no hay calificaciones
- Clase 1 Compilador CCS CDocumento31 páginasClase 1 Compilador CCS CMishell Sanchez GuevaraAún no hay calificaciones
- Actividad 2 Conversor ADC-DAC - 8Documento8 páginasActividad 2 Conversor ADC-DAC - 8Jacobo QuinteroAún no hay calificaciones
- PIC 18 Simulator IDEDocumento44 páginasPIC 18 Simulator IDEfhidalgo_8Aún no hay calificaciones
- Elec. PotenciaDocumento16 páginasElec. Potenciaalejandra caveroAún no hay calificaciones
- Diseno Sistemas Digitales IIDocumento184 páginasDiseno Sistemas Digitales IICarlos ColmenarezAún no hay calificaciones
- Larma - Practica n1 - Lectura Encoder IncrementalDocumento3 páginasLarma - Practica n1 - Lectura Encoder IncrementalGonzalo BerardoAún no hay calificaciones
- Introduccion HDL y VerilogDocumento81 páginasIntroduccion HDL y VerilogPedro Ruiz DiazAún no hay calificaciones
- Introducción A ArduinoDocumento52 páginasIntroducción A ArduinoAnny MurilloAún no hay calificaciones
- Aprendiendo A Programar. Microcontroladores PIC En. Lenguaje C Con CCSDocumento62 páginasAprendiendo A Programar. Microcontroladores PIC En. Lenguaje C Con CCSELPICHUE0% (1)
- Nand VS NorDocumento2 páginasNand VS NorJohann Geisser AguilarAún no hay calificaciones
- CUESTIONARIOTEMA5Documento8 páginasCUESTIONARIOTEMA5Pedro Castiblanco100% (1)
- Servomoteres CDDocumento20 páginasServomoteres CDrobertoAún no hay calificaciones
- Microcontroladores AVRDocumento3 páginasMicrocontroladores AVRMarcos EstrellaAún no hay calificaciones
- PARTE 5 - Tipos de Variables en ProtónDocumento3 páginasPARTE 5 - Tipos de Variables en ProtónEsteticoAún no hay calificaciones
- LedDocumento17 páginasLedAna MayesAún no hay calificaciones
- S3-CA - Module - 5-Protocolos de RedDocumento58 páginasS3-CA - Module - 5-Protocolos de RedpachitopalaAún no hay calificaciones
- Maqueta de Una Casa DomóticaDocumento4 páginasMaqueta de Una Casa DomóticaNadiaVanessaAún no hay calificaciones
- Documento PLC OmronDocumento18 páginasDocumento PLC OmronWilliam JoyaAún no hay calificaciones
- Intro EmbebidosDocumento34 páginasIntro EmbebidosHarry PradoAún no hay calificaciones
- Microcontrolador Pic16f84Documento45 páginasMicrocontrolador Pic16f84josetantonioAún no hay calificaciones
- Proyectos Con PICsDocumento8 páginasProyectos Con PICsArmando CajahuaringaAún no hay calificaciones
- Libro 16F887Documento114 páginasLibro 16F887Angel ToledoAún no hay calificaciones
- Ejemplos PLCDocumento10 páginasEjemplos PLCcobra1962Aún no hay calificaciones
- Apuntes Diseño DigitalDocumento88 páginasApuntes Diseño DigitalGregorio De Santiago SánchezAún no hay calificaciones
- FotodiodoDocumento8 páginasFotodiodoJohan GRAún no hay calificaciones
- Comandos de ArduinoDocumento4 páginasComandos de ArduinoZuleyma ArroyoAún no hay calificaciones
- Circuito Monoestable Con 555Documento5 páginasCircuito Monoestable Con 555Mario PellegrinoAún no hay calificaciones
- Mapa de KarnaughDocumento16 páginasMapa de KarnaughFernando JuhaszAún no hay calificaciones
- Manual XilinxDocumento15 páginasManual XilinxPakitoCachorrosAún no hay calificaciones
- Lenguaje C para Microcontroladores PSoC Parte1Documento37 páginasLenguaje C para Microcontroladores PSoC Parte1Diego BustosAún no hay calificaciones
- Programación I PLC - Carlos Gustavo Pérez ZuñigaDocumento45 páginasProgramación I PLC - Carlos Gustavo Pérez ZuñigaCarlos Gustavo PérezAún no hay calificaciones
- Clase 7. Salidas Digitales, For e IfDocumento12 páginasClase 7. Salidas Digitales, For e IfArmandoSolorzanoAún no hay calificaciones
- Sew Mdx61b EncoderDocumento72 páginasSew Mdx61b EncoderEva SuárezAún no hay calificaciones
- Control de PosicionDocumento17 páginasControl de PosicionDaniel Rocha UgaldeAún no hay calificaciones
- Bus de Campo en Comunicacion IndustrialDocumento11 páginasBus de Campo en Comunicacion Industrialanon_9714Aún no hay calificaciones
- Luces AudioritmicasDocumento12 páginasLuces AudioritmicasMidwar Miguel ChuraAún no hay calificaciones
- 1 2 1 Manual Practicas Microcontroladores 2017Documento44 páginas1 2 1 Manual Practicas Microcontroladores 2017carAún no hay calificaciones
- Buenas Practicas de Programacion en RailsDocumento48 páginasBuenas Practicas de Programacion en RailsHenry Leandro Garcia OspinaAún no hay calificaciones
- Robótica - 4-Sistemas de Coordenadas PDFDocumento16 páginasRobótica - 4-Sistemas de Coordenadas PDFAlejandro CordobaAún no hay calificaciones
- 1.5 Interface GpibDocumento39 páginas1.5 Interface GpibDany CAAún no hay calificaciones
- PP PLC 003 v1.0 PLC Mitsubishi - Programacion SFCDocumento17 páginasPP PLC 003 v1.0 PLC Mitsubishi - Programacion SFCRicardo Pelao LetelierAún no hay calificaciones
- Arquitectura Interna Del MicrocontroladorDocumento9 páginasArquitectura Interna Del MicrocontroladorUriel SolisAún no hay calificaciones
- Manual EagleDocumento27 páginasManual EagleSaul Hernandez100% (1)
- Entrenador para Micro Control Ad or Con PBPDocumento56 páginasEntrenador para Micro Control Ad or Con PBPbandusAún no hay calificaciones
- Microcontroladores PicDocumento30 páginasMicrocontroladores PicMiguel A. FloresAún no hay calificaciones
- Proyecto CarritoDocumento8 páginasProyecto CarritoMelba EstrellaAún no hay calificaciones
- Lógica Secuencial Registros de Desplazamiento y ContadoresDocumento18 páginasLógica Secuencial Registros de Desplazamiento y ContadoresEdy MirandaAún no hay calificaciones
- Simuladores SchneiderDocumento10 páginasSimuladores SchneiderSergio Mauricio Acuña BravoAún no hay calificaciones
- Sistema de Control DigitalDocumento10 páginasSistema de Control DigitalYEFERSONAún no hay calificaciones
- Laboratorio de Electronica Analogica II PDFDocumento37 páginasLaboratorio de Electronica Analogica II PDFReymi ThenAún no hay calificaciones
- P1 Entradas y Salidas Digitales ReporteDocumento10 páginasP1 Entradas y Salidas Digitales ReporteDavid FernandezAún no hay calificaciones
- Lab Arduino 3 y 4Documento12 páginasLab Arduino 3 y 4Forex Alexander Cadena GarciaAún no hay calificaciones
- LABO3ELECTRICA20IVDocumento15 páginasLABO3ELECTRICA20IVMatt Rattz VegAún no hay calificaciones
- Centro de Enseñanza Tecnica Industrial: Sistemas Microelectromecánicos (MEMS)Documento16 páginasCentro de Enseñanza Tecnica Industrial: Sistemas Microelectromecánicos (MEMS)Diego Job Contreras PérezAún no hay calificaciones
- Reporte de Practica 2Documento15 páginasReporte de Practica 2Alejandro PasozAún no hay calificaciones
- RutinaDocumento10 páginasRutinafrarutoAún no hay calificaciones
- Mir Croon DasDocumento1 páginaMir Croon DasfrarutoAún no hay calificaciones
- CiudadanaDocumento1 páginaCiudadanafrarutoAún no hay calificaciones
- Lengua LibroDocumento2 páginasLengua LibrofrarutoAún no hay calificaciones
- Manual Híbridos y Eléctricos - NissanDocumento43 páginasManual Híbridos y Eléctricos - Nissanalex jammAún no hay calificaciones
- Planeacion Semana 2Documento10 páginasPlaneacion Semana 2Monik Gallegos MorenoAún no hay calificaciones
- 02.pasos para Identificar Las Fuentes LCDDocumento15 páginas02.pasos para Identificar Las Fuentes LCDClubedoTecnicoAún no hay calificaciones
- Experiencia #1R TransistoresDocumento5 páginasExperiencia #1R TransistoresJaime RamiroAún no hay calificaciones
- Revision: Mecanica Del MotorDocumento28 páginasRevision: Mecanica Del Motorjose jimenezAún no hay calificaciones
- Taller de La Generaciones de Las ComputadorasDocumento9 páginasTaller de La Generaciones de Las ComputadorasFerley PCAún no hay calificaciones
- MANUAL DAEWOO TICO Parte 8Documento31 páginasMANUAL DAEWOO TICO Parte 8LhinCe Rojinegro100% (1)
- Manual Del Usuario: Comprobadores de Resistencia de Aislamiento de 5, 10 y 15 KV CC de Alto RendimientoDocumento45 páginasManual Del Usuario: Comprobadores de Resistencia de Aislamiento de 5, 10 y 15 KV CC de Alto RendimientoRafael GutiAún no hay calificaciones
- Previo 7Documento8 páginasPrevio 7IVAN ALONSO CCAHUACHIA LETONAAún no hay calificaciones
- JVDocumento5 páginasJVkhjoseAún no hay calificaciones
- Manual - Man Electrico 2023borrador 24-3-23Documento61 páginasManual - Man Electrico 2023borrador 24-3-23edgarllunaAún no hay calificaciones
- Resultado Del Aprendizaje U1 Sistemas MecánicosDocumento5 páginasResultado Del Aprendizaje U1 Sistemas MecánicosCesar PreciadoAún no hay calificaciones
- Guía ESTRUCTURA INTERNA DE UNA COMPUTADORADocumento8 páginasGuía ESTRUCTURA INTERNA DE UNA COMPUTADORAalfonsoAún no hay calificaciones
- Vetro de Cantabria, S.A de C.V. MBS-21-4302Documento2 páginasVetro de Cantabria, S.A de C.V. MBS-21-4302zasukAún no hay calificaciones
- Mejoras de Energía - Enero 2021Documento9 páginasMejoras de Energía - Enero 2021Cristian Cristobal De La CruzAún no hay calificaciones
- Instrumentos de Medición EléctricaDocumento6 páginasInstrumentos de Medición EléctricaDavidAún no hay calificaciones
- Laboratorio 3Documento3 páginasLaboratorio 3Diego A CruzAún no hay calificaciones
- Cotiza 021 Dominus S.A.C.Documento4 páginasCotiza 021 Dominus S.A.C.Darwin JucAún no hay calificaciones
- Informe Tecnico Kenworth T 800 Ruben Alexis PAtiño Jaimes 15 de Mayo Del 2023Documento19 páginasInforme Tecnico Kenworth T 800 Ruben Alexis PAtiño Jaimes 15 de Mayo Del 2023luis fernando bayona velascoAún no hay calificaciones
- Preoperacional BulldozerDocumento1 páginaPreoperacional BulldozerCarolina FernandezAún no hay calificaciones
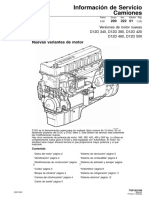
- Nuevos Motores D12DDocumento12 páginasNuevos Motores D12DAriel86% (7)
- Capitulo Electrico - Propuesta PuertoDocumento2 páginasCapitulo Electrico - Propuesta PuertoElvia M Jaraba MAún no hay calificaciones
- Curso de Diesel en GeneralDocumento298 páginasCurso de Diesel en GeneralJorge100% (1)
- Tutoriales Conversión A Eléctrico Archivos - Elektrun Cars Convertir Tu Coche A ElectricoDocumento12 páginasTutoriales Conversión A Eléctrico Archivos - Elektrun Cars Convertir Tu Coche A ElectricoDomingo OrmarAún no hay calificaciones
- Catálogo de Armas Sedena Diciembre 2022Documento4 páginasCatálogo de Armas Sedena Diciembre 2022La chica del SEO100% (2)
- Instructivo de Cortacircuito FusiblesDocumento4 páginasInstructivo de Cortacircuito FusiblesInocencio MartinezAún no hay calificaciones
- PE-CN-12 Rev 00-SignedDocumento10 páginasPE-CN-12 Rev 00-SignederikAún no hay calificaciones
- Practica 1 Robótica 0A Hernández Sánchez Raúl 17142132Documento10 páginasPractica 1 Robótica 0A Hernández Sánchez Raúl 17142132Raúl Hernández SánchezAún no hay calificaciones
- Manual Teorico Pala 2022Documento72 páginasManual Teorico Pala 2022Alumnos TeóricosAún no hay calificaciones
- STS Touring SeriesDocumento5 páginasSTS Touring Seriesnicolasav140Aún no hay calificaciones
- UF0513 - Gestión auxiliar de archivo en soporte convencional o informáticoDe EverandUF0513 - Gestión auxiliar de archivo en soporte convencional o informáticoCalificación: 1 de 5 estrellas1/5 (1)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosDe EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosCalificación: 4 de 5 estrellas4/5 (16)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressDe EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressCalificación: 5 de 5 estrellas5/5 (1)
- Conquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesDe EverandConquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Cultura y clima: fundamentos para el cambio en la organizaciónDe EverandCultura y clima: fundamentos para el cambio en la organizaciónAún no hay calificaciones
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Guía de aplicacion de la ISO 9001:2015De EverandGuía de aplicacion de la ISO 9001:2015Calificación: 5 de 5 estrellas5/5 (3)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.De EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Calificación: 5 de 5 estrellas5/5 (1)
- Aprende a Modelar Aplicaciones con UML - Tercera EdiciónDe EverandAprende a Modelar Aplicaciones con UML - Tercera EdiciónCalificación: 2 de 5 estrellas2/5 (1)
- El Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenDe EverandEl Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenCalificación: 5 de 5 estrellas5/5 (8)
- Radiocomunicaciones: Teoría y principiosDe EverandRadiocomunicaciones: Teoría y principiosCalificación: 5 de 5 estrellas5/5 (3)
- GuíaBurros: El controller de empresa: Cómo realizar el control total de tu empresaDe EverandGuíaBurros: El controller de empresa: Cómo realizar el control total de tu empresaAún no hay calificaciones
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Ciberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialDe EverandCiberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialCalificación: 4.5 de 5 estrellas4.5/5 (11)
- 44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchDe Everand44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchCalificación: 3.5 de 5 estrellas3.5/5 (2)
- Python Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREDe EverandPython Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWARECalificación: 4 de 5 estrellas4/5 (13)
- Toma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasDe EverandToma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasAún no hay calificaciones