También podría gustarte
- Sistema de información para la operación remota de plantas de generación de energía hidroeléctricaDe EverandSistema de información para la operación remota de plantas de generación de energía hidroeléctricaAún no hay calificaciones
- LatexDocumento14 páginasLatexalvaro del cojoAún no hay calificaciones
- Sintonización P.I. DL2314Documento19 páginasSintonización P.I. DL2314Richard Milano Callupe MantariAún no hay calificaciones
- Informe Proyecto PDFDocumento41 páginasInforme Proyecto PDFCarito ZambranoAún no hay calificaciones
- Tarea 8 - Análisis de Entradas y Salidas de Un Proceso IndustrialDocumento14 páginasTarea 8 - Análisis de Entradas y Salidas de Un Proceso IndustrialAndtres C Pulloquinga CAún no hay calificaciones
- Evaluación 2 S7 1200Documento6 páginasEvaluación 2 S7 1200juankAún no hay calificaciones
- Paso 1 Grupo 208055 3Documento17 páginasPaso 1 Grupo 208055 3Jose Luis GonzalezAún no hay calificaciones
- T2298Documento149 páginasT2298Bebedmi Yviviras EternamenteAún no hay calificaciones
- Laboratorio3 Controlpid, Cascada, AnticipativoDocumento17 páginasLaboratorio3 Controlpid, Cascada, AnticipativoEddylson KevinAún no hay calificaciones
- Practica Lab de PLC - Reconocimiento (TwidoSuit)Documento9 páginasPractica Lab de PLC - Reconocimiento (TwidoSuit)fabiolajesAún no hay calificaciones
- Control Variador Sinamics G120Documento121 páginasControl Variador Sinamics G120JAVIER RODRIGUEZAún no hay calificaciones
- Diseño de Un Diagrama P&Id Con Estrategia de Control de Nivel para Tanque de AlmacenamientoDocumento22 páginasDiseño de Un Diagrama P&Id Con Estrategia de Control de Nivel para Tanque de AlmacenamientoAldo LariosAún no hay calificaciones
- Manual de Prácticas Labview - López Jiménez VioletaDocumento30 páginasManual de Prácticas Labview - López Jiménez Violetavioleta_jiménez_2Aún no hay calificaciones
- Lab 2Documento10 páginasLab 2ZOILA ELIANA COAQUIRA MAMANIAún no hay calificaciones
- Informe 9 CutipaDocumento14 páginasInforme 9 CutipaSandro CruzAún no hay calificaciones
- Labview Fabrica de Velas SimulacionDocumento14 páginasLabview Fabrica de Velas SimulacionAndrés BonillaAún no hay calificaciones
- Controladores Lógicos Programables PIDDocumento13 páginasControladores Lógicos Programables PIDYhan Pier HuamánAún no hay calificaciones
- Control Por PLC Maquina Mezcladora de Dos IngredientesDocumento13 páginasControl Por PLC Maquina Mezcladora de Dos IngredientesIEduardo Gomez Silva0% (1)
- Tesis Con Delta V - 03Documento278 páginasTesis Con Delta V - 03Richard GranadoAún no hay calificaciones
- 43.1360 Valdieso Jacome Jose EduardoDocumento62 páginas43.1360 Valdieso Jacome Jose EduardoLeonardo GonzálezAún no hay calificaciones
- Lab16. Control de ProcesoDocumento11 páginasLab16. Control de ProcesoYordi AlvitresAún no hay calificaciones
- E2 - Wanderley Veronez - revMDDDocumento13 páginasE2 - Wanderley Veronez - revMDDcristian_miranda_mAún no hay calificaciones
- Ejemplo Redes IndustrialesDocumento26 páginasEjemplo Redes IndustrialesCarlos Andres Moya ErazoAún no hay calificaciones
- Ejemplo Redes Industriales PDFDocumento26 páginasEjemplo Redes Industriales PDFAnonymous AKitmqlAún no hay calificaciones
- Interfas Labview PDFDocumento59 páginasInterfas Labview PDFlem martinezAún no hay calificaciones
- Lab 2Documento9 páginasLab 2ZOILA ELIANA COAQUIRA MAMANIAún no hay calificaciones
- Florencio Inga Pedro Scada Agua ManchayDocumento76 páginasFlorencio Inga Pedro Scada Agua ManchayJose LunaAún no hay calificaciones
- Práctica 1. Laboratorio de Control y Robótica. Isaac Villamares QuirozDocumento14 páginasPráctica 1. Laboratorio de Control y Robótica. Isaac Villamares QuirozIsaac VillamaresAún no hay calificaciones
- TESINA de PLC Delta y Pantalla Hmi Maceradora de CervezaDocumento45 páginasTESINA de PLC Delta y Pantalla Hmi Maceradora de CervezaJesus Castañeda AguirreAún no hay calificaciones
- TesisDocumento166 páginasTesisDenisse Soledispa MoraAún no hay calificaciones
- Lab 7 Efecto Acciones de Control PIDDocumento9 páginasLab 7 Efecto Acciones de Control PIDJohan Adrian Arcos SantacruzAún no hay calificaciones
- Diseño de Un Sistema SCADA Capaz de Controlar Una Planta de Bombeo de Agua Con Tres Estaciones de BombeoDocumento86 páginasDiseño de Un Sistema SCADA Capaz de Controlar Una Planta de Bombeo de Agua Con Tres Estaciones de BombeoJorge Luis ApazaAún no hay calificaciones
- TFG I 1694anejoDocumento18 páginasTFG I 1694anejoMarcelo CayllanteAún no hay calificaciones
- Control de ProcesoDocumento23 páginasControl de ProcesoalexAún no hay calificaciones
- 21312313Documento18 páginas21312313Luzmila Guerra GonzalesAún no hay calificaciones
- Taller 6 SISTEMA DE MANDOS ELÉCTRICOSDocumento31 páginasTaller 6 SISTEMA DE MANDOS ELÉCTRICOSRaul Alonso Melendez Avila100% (1)
- Control PIDDocumento4 páginasControl PIDLucero CruzAún no hay calificaciones
- Curso Scada Automatizacion - LabviewDocumento59 páginasCurso Scada Automatizacion - LabviewMarcelo MastrascusaAún no hay calificaciones
- TFG - LuisGeovannyTrivinoMacias PenduloDocumento51 páginasTFG - LuisGeovannyTrivinoMacias PenduloRonny Díaz LópezAún no hay calificaciones
- Investigacion en Control de Procesos Borrador 27.11.2020Documento45 páginasInvestigacion en Control de Procesos Borrador 27.11.2020Manuel Blanco MendozaAún no hay calificaciones
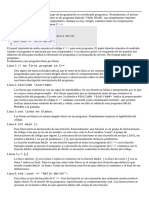
- BS2pSpanish PARALAXDocumento240 páginasBS2pSpanish PARALAXletterniAún no hay calificaciones
- Deber#1 Iip Control DigitalDocumento34 páginasDeber#1 Iip Control DigitalSTEVEN PAUL SANDOVAL VALLEJOAún no hay calificaciones
- Procedimiento para Realizar Medición Descargas Parciales 2Documento11 páginasProcedimiento para Realizar Medición Descargas Parciales 2Carlos Roberto GavarreteAún no hay calificaciones
- AutomatizacionDocumento11 páginasAutomatizacionelianAún no hay calificaciones
- Control de Nivel PLCDocumento39 páginasControl de Nivel PLCmarceloAún no hay calificaciones
- MICROCONTROLADORESDocumento17 páginasMICROCONTROLADORESEDGAR KANTUTA HAún no hay calificaciones
- Reporte Proyecto Final - Grupo #5Documento26 páginasReporte Proyecto Final - Grupo #5Luz celeste FriasAún no hay calificaciones
- Informe TEC PDFDocumento40 páginasInforme TEC PDFpato2023Aún no hay calificaciones
- Práctica 6 Automatización de ProcesosDocumento15 páginasPráctica 6 Automatización de ProcesosOscar Quiroz Lemus100% (1)
- Sistema de Control Automatico Usando LabView PDFDocumento118 páginasSistema de Control Automatico Usando LabView PDFEdwin Fernandez GonzalesAún no hay calificaciones
- Robot Balancin-Ingenieria de ControlDocumento25 páginasRobot Balancin-Ingenieria de ControlJorge Carlos Mogollon Rojas50% (2)
- Lab N°6 Programación AnalógicaDocumento22 páginasLab N°6 Programación AnalógicaRenzo GonzalesAún no hay calificaciones
- Pid Pendulo InvertidoDocumento12 páginasPid Pendulo InvertidoAndres Castro VacaAún no hay calificaciones
- Práctica 5 Automatización de ProcesosDocumento15 páginasPráctica 5 Automatización de ProcesosOscar Quiroz Lemus100% (3)
- Control neuronal y difuso para sistemas fotovoltaicosDe EverandControl neuronal y difuso para sistemas fotovoltaicosAún no hay calificaciones
- Elevadores: principios e innovacionesDe EverandElevadores: principios e innovacionesCalificación: 5 de 5 estrellas5/5 (2)
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109De EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Aún no hay calificaciones
- Instrumento de EvaluacionDocumento3 páginasInstrumento de EvaluacionBryan SaenzAún no hay calificaciones
- Bejarano Carbajal Carlos FranciscoDocumento13 páginasBejarano Carbajal Carlos FranciscoCarlos BejaranoAún no hay calificaciones
- Practica 1 - Carlos BejaranoDocumento15 páginasPractica 1 - Carlos BejaranoCarlos BejaranoAún no hay calificaciones
- Cruz Mayhuiri GersonDocumento14 páginasCruz Mayhuiri GersonCarlos BejaranoAún no hay calificaciones
- BEJARANO CARBAJAL CARLOS FRANCISCO - Trabajo de InvestigacionDocumento8 páginasBEJARANO CARBAJAL CARLOS FRANCISCO - Trabajo de InvestigacionCarlos BejaranoAún no hay calificaciones
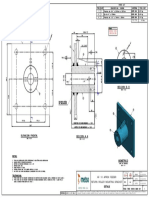
- PSC-FAB-2018-009-01 Rev 2Documento1 páginaPSC-FAB-2018-009-01 Rev 2Carlos BejaranoAún no hay calificaciones
- Suple para Chutes Fabricacion Rev 4Documento5 páginasSuple para Chutes Fabricacion Rev 4Carlos BejaranoAún no hay calificaciones
- Control de Velocidad El Logica Borrosa para EntornosDocumento28 páginasControl de Velocidad El Logica Borrosa para EntornosCarlos BejaranoAún no hay calificaciones
- Flyer VT Level I and II PDFDocumento2 páginasFlyer VT Level I and II PDFCarlos BejaranoAún no hay calificaciones
- CICLOCONVERTIDORESDocumento19 páginasCICLOCONVERTIDORESCarlos BejaranoAún no hay calificaciones
- Avance Practica 8Documento13 páginasAvance Practica 8Carlos BejaranoAún no hay calificaciones
- Control Practica 1Documento4 páginasControl Practica 1Carlos BejaranoAún no hay calificaciones
- CARTADocumento1 páginaCARTACarlos BejaranoAún no hay calificaciones
- Biela Manivela MatLabDocumento8 páginasBiela Manivela MatLabCarlos BejaranoAún no hay calificaciones
- Analisis Geometrico de Posicion de Mecanismos PlanosDocumento9 páginasAnalisis Geometrico de Posicion de Mecanismos PlanosvaguiwiAún no hay calificaciones
- Clases de Enfriamiento Dentro Del Sistema de RefrigeraciónDocumento8 páginasClases de Enfriamiento Dentro Del Sistema de RefrigeraciónCarlos BejaranoAún no hay calificaciones
- Trabajo de Control Mecatronico 2Documento10 páginasTrabajo de Control Mecatronico 2Carlos BejaranoAún no hay calificaciones
- Qué Es VGA y HdmiDocumento8 páginasQué Es VGA y HdmijoseAún no hay calificaciones
- UntitledDocumento4 páginasUntitledEzequiel Cuevas GomezAún no hay calificaciones
- Lab 07 - Matlab Modelado y Simulasion, Programacion Con Simulink y StateflowDocumento5 páginasLab 07 - Matlab Modelado y Simulasion, Programacion Con Simulink y StateflowCristian Ivan Chaupi ArequipaAún no hay calificaciones
- Marco Teórico AutomatizaciónDocumento3 páginasMarco Teórico AutomatizaciónBrayan PinazoAún no hay calificaciones
- Red de DatosDocumento14 páginasRed de DatosAmerica CarrascoAún no hay calificaciones
- Informatica - TP1 IntroduccionDocumento2 páginasInformatica - TP1 IntroduccionNelson CórdobaAún no hay calificaciones
- Marco C++Documento10 páginasMarco C++BRAYAN SALAZAR MEZAAún no hay calificaciones
- 11 Taller 1Documento107 páginas11 Taller 1QueTeDenPolCulooAún no hay calificaciones
- Ejemplos de Modelos de SoftwareDocumento4 páginasEjemplos de Modelos de SoftwarePaul_sds05100% (1)
- Ensamblaje de ComputadorasDocumento33 páginasEnsamblaje de ComputadorasNilton Jose Espinoza MoralesAún no hay calificaciones
- Istemas Operativos en RedDocumento22 páginasIstemas Operativos en RedJC AlejandritoAún no hay calificaciones
- "Hello World!": // My First Program in C++Documento9 páginas"Hello World!": // My First Program in C++romanito0Aún no hay calificaciones
- Trabajo Grupal1Documento2 páginasTrabajo Grupal1Wilson Apaza YucraAún no hay calificaciones
- ACTIVIDAD NRO 02 - Jorge Nuñez GarcíaDocumento3 páginasACTIVIDAD NRO 02 - Jorge Nuñez GarcíaJORGE ARMANDO NUNEZ GARCIAAún no hay calificaciones
- ZXBInstaller Version 3.3.1 FinalDocumento11 páginasZXBInstaller Version 3.3.1 Finalmantys55543% (7)
- Evolución de Los SmartphonesDocumento3 páginasEvolución de Los SmartphonesLAURA LILIANA MENDOZA TREJOAún no hay calificaciones
- IISI - Evaluación Final - D - Ebert ZunigaDocumento4 páginasIISI - Evaluación Final - D - Ebert ZunigaEbert ZunigaAún no hay calificaciones
- Laboratorio3 AngeloPinedaPortilloDocumento9 páginasLaboratorio3 AngeloPinedaPortilloDaniel PortilloAún no hay calificaciones
- DyASO 2019 Febrero Segunda SemanaDocumento2 páginasDyASO 2019 Febrero Segunda SemanaCarlos MorenoAún no hay calificaciones
- Crack Cype 2012Documento7 páginasCrack Cype 2012paballaysAún no hay calificaciones
- Unidad 1 - Actividad 2 - Protocolos de RedDocumento15 páginasUnidad 1 - Actividad 2 - Protocolos de RedLucía Marcela FloresAún no hay calificaciones
- Gestion de Estructuras de AlmacenamientoDocumento29 páginasGestion de Estructuras de AlmacenamientoNilson ACAún no hay calificaciones
- El Ordenador y Sus Componentes 3c2ba Eso EsquemaDocumento7 páginasEl Ordenador y Sus Componentes 3c2ba Eso EsquemaInma Cubero ExtremeraAún no hay calificaciones
- Actividad 14 - AHRDocumento4 páginasActividad 14 - AHRAlan JuarezAún no hay calificaciones
- Datos de La Shield Sim900Documento21 páginasDatos de La Shield Sim900Jorge Villalobos Jiménez50% (2)
- Colas y PilasDocumento12 páginasColas y PilasMichael AlavaAún no hay calificaciones
- Dijkstra SPF ALGORITMO (El Que Usa Ospf)Documento3 páginasDijkstra SPF ALGORITMO (El Que Usa Ospf)Leonardo AlbaneseAún no hay calificaciones
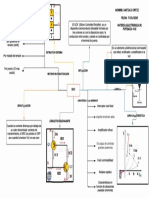
- Mapa Mental de SRCDocumento1 páginaMapa Mental de SRCDX LancerAún no hay calificaciones
- Guía 4 - Teórica-Práctica - Encuentros 12, 13 y 14Documento11 páginasGuía 4 - Teórica-Práctica - Encuentros 12, 13 y 14ana VelezAún no hay calificaciones
- WS Emision Servicio CFDI 4.0Documento16 páginasWS Emision Servicio CFDI 4.0Oscar Oswaldo Ramírez MoraAún no hay calificaciones