También podría gustarte
- Practica 9 y 10 - LCA1Documento16 páginasPractica 9 y 10 - LCA1HéctorAún no hay calificaciones
- Practica9-Scilab Resp 1erordenDocumento12 páginasPractica9-Scilab Resp 1erordenemilieth gonzalezAún no hay calificaciones
- Ejercicios de potencia, series de Taylor y FourierDe EverandEjercicios de potencia, series de Taylor y FourierAún no hay calificaciones
- Análisis de Sistemas de Control en El DominioDocumento45 páginasAnálisis de Sistemas de Control en El Dominiofernando perezAún no hay calificaciones
- 2 2 - Rpta-TransitoriaDocumento105 páginas2 2 - Rpta-TransitoriaLeinerIvanAún no hay calificaciones
- S03 Lab 02 Laplace v03Documento3 páginasS03 Lab 02 Laplace v03Robe CaroAún no hay calificaciones
- Capítulo 1Documento24 páginasCapítulo 1jesusAún no hay calificaciones
- T3.1.Respuesta Transitoria y Permanente 1314Documento26 páginasT3.1.Respuesta Transitoria y Permanente 1314teresa alvarez alvarezAún no hay calificaciones
- Trabajo Colaborativo Etapa 1 Grupo 243005 - 26Documento11 páginasTrabajo Colaborativo Etapa 1 Grupo 243005 - 26emilio alvaradoAún no hay calificaciones
- Sistemas Dinamicos Unidad II Respuesta DDocumento14 páginasSistemas Dinamicos Unidad II Respuesta DLio DonaltyAún no hay calificaciones
- Guia2 2019 ControlDocumento4 páginasGuia2 2019 ControlJorSepulvedaAún no hay calificaciones
- C04 - Diagrama de Bloques y Respuesta TransitoriaDocumento49 páginasC04 - Diagrama de Bloques y Respuesta TransitoriaCarlos CastilloAún no hay calificaciones
- Respuesta de Los Sistemas Lineales de Primer OrdenDocumento5 páginasRespuesta de Los Sistemas Lineales de Primer OrdenLuis CastroAún no hay calificaciones
- Cap 2Documento13 páginasCap 2Jhonny CalaniAún no hay calificaciones
- Deber No 3 SS P51 53Documento3 páginasDeber No 3 SS P51 53Cristian SánchezAún no hay calificaciones
- 1.10. - Rpta Temporal de Sistemas de ControlDocumento106 páginas1.10. - Rpta Temporal de Sistemas de ControlRossi Huaman OliveraAún no hay calificaciones
- 1.5 Respuesta Al Impulso y Función de TransferenciaDocumento7 páginas1.5 Respuesta Al Impulso y Función de TransferenciaRodríguez Hernández Marco AntonioAún no hay calificaciones
- Señales de PruebaDocumento8 páginasSeñales de PruebaecalderoncomtelingerAún no hay calificaciones
- Teoria Moderna de Control LinealDocumento92 páginasTeoria Moderna de Control LinealEddie MarinAún no hay calificaciones
- Problemas Modelado de SistemasDocumento27 páginasProblemas Modelado de Sistemasadin bellatorAún no hay calificaciones
- UMIDAD III Analisis TiempoDocumento37 páginasUMIDAD III Analisis TiempoDavid Jose GodoyAún no hay calificaciones
- Cap 1Documento20 páginasCap 1wilverAún no hay calificaciones
- Resumen Matematica Superior - Parcial 1Documento11 páginasResumen Matematica Superior - Parcial 1Elías CapassoAún no hay calificaciones
- Modelado en Espacios de Estado Michelle JacomeDocumento8 páginasModelado en Espacios de Estado Michelle JacomeMichelle Jácome FonsecaAún no hay calificaciones
- Unidad III Sistemas LitceDocumento8 páginasUnidad III Sistemas LitceCarlos Gomez0% (1)
- Conc Ejer T3Documento42 páginasConc Ejer T3Ever VelascoAún no hay calificaciones
- Resumen Final Mat SupDocumento39 páginasResumen Final Mat SupRoman SadowskiAún no hay calificaciones
- Cuestionario 1 A3 ResueltoDocumento3 páginasCuestionario 1 A3 ResueltoanaAún no hay calificaciones
- Apuntes de Cuaderno Control ClásicoDocumento5 páginasApuntes de Cuaderno Control ClásicoORTG100% (1)
- Convo Luci OnDocumento28 páginasConvo Luci OnGEORGE AR�MIS VASQUEZ LLANOSAún no hay calificaciones
- Señales y Sistemas de Tiempo ContinuoDocumento76 páginasSeñales y Sistemas de Tiempo ContinuoArmando CajahuaringaAún no hay calificaciones
- Semana 8 - Convolucion y Serie de FourierDocumento40 páginasSemana 8 - Convolucion y Serie de FourierGustavo Quispe InocenteAún no hay calificaciones
- Tarea 2 ConvoluciónDocumento15 páginasTarea 2 ConvoluciónEdwin LarrahondoAún no hay calificaciones
- Muestreo Reconstruccion Control DigitalDocumento34 páginasMuestreo Reconstruccion Control DigitalelblinblinhotsauceAún no hay calificaciones
- Mod Sim ContinuosDocumento43 páginasMod Sim ContinuosPaco BejarAún no hay calificaciones
- Practica 3Documento6 páginasPractica 3Noc DgAún no hay calificaciones
- Unidad 01a PDFDocumento49 páginasUnidad 01a PDFKelvin MartínezAún no hay calificaciones
- 1.2 - Señales Continuas Basicas (En El Tiempo)Documento8 páginas1.2 - Señales Continuas Basicas (En El Tiempo)Cecy BlasAún no hay calificaciones
- Laboratorio 1Documento16 páginasLaboratorio 1Claudio BanegasAún no hay calificaciones
- Analisis de La Respuesta TemporalDocumento19 páginasAnalisis de La Respuesta Temporallewys rinconAún no hay calificaciones
- Respuesta Temporal TeoriaDocumento10 páginasRespuesta Temporal TeoriaAlexander Castillo MaytaAún no hay calificaciones
- Unidad 1: Procesamiento de Señales Digitales Indira Cassaleth GarridoDocumento116 páginasUnidad 1: Procesamiento de Señales Digitales Indira Cassaleth GarridoVictor Rodrigo Cruz DelgadoAún no hay calificaciones
- Capítulo 2P-E Respuesta Estado Transitorio TssDocumento61 páginasCapítulo 2P-E Respuesta Estado Transitorio TssJoshua GonzalezAún no hay calificaciones
- Señales y Sistemas - Alan V. Oppenheim y Alan S. Willsky. 2ed. - MatematicaReviewDocumento17 páginasSeñales y Sistemas - Alan V. Oppenheim y Alan S. Willsky. 2ed. - MatematicaReviewAleeja LopezAún no hay calificaciones
- Preguntas - ITEM GRUPAL - Ubeimar - VargasDocumento6 páginasPreguntas - ITEM GRUPAL - Ubeimar - Vargastrabajos unad unadAún no hay calificaciones
- Clase 04Documento51 páginasClase 04Giancarlo Salazar YaringañoAún no hay calificaciones
- Laboratorio 8Documento8 páginasLaboratorio 8sirius64Aún no hay calificaciones
- Respuesta en El Tiempo de Sistemas de Primer OrdenDocumento4 páginasRespuesta en El Tiempo de Sistemas de Primer OrdenergrAún no hay calificaciones
- Control Digital Taller ParcialDocumento3 páginasControl Digital Taller ParcialOmar David Peña IbarraAún no hay calificaciones
- S03.s1. Teoria Análisis de Respuesta TemporalDocumento10 páginasS03.s1. Teoria Análisis de Respuesta TemporalCarlos LOAún no hay calificaciones
- Señales y SistemasDocumento23 páginasSeñales y SistemasBryan Jesus RAAún no hay calificaciones
- Lectura Ejercicios Propiedades de Los Sistemas Usando Su Relaci N Entrada SalidaDocumento7 páginasLectura Ejercicios Propiedades de Los Sistemas Usando Su Relaci N Entrada SalidaJosé AndradesAún no hay calificaciones
- Respuesta Dinamica GabDocumento24 páginasRespuesta Dinamica GabJosuè Priego SanabriaAún no hay calificaciones
- Tarea 2 Grupo 203042 20Documento34 páginasTarea 2 Grupo 203042 20jonatan patiñoAún no hay calificaciones
- IC P4 EnScilabDocumento4 páginasIC P4 EnScilabJesus GarcíaAún no hay calificaciones
- Tema1 Portada-2Documento31 páginasTema1 Portada-2tigreAún no hay calificaciones
- Informe Numero 2Documento18 páginasInforme Numero 2Emanuel Corrales ZamalloaAún no hay calificaciones
- TAREA 1.2 Organización de Un Conjunto de DatosDocumento7 páginasTAREA 1.2 Organización de Un Conjunto de DatosSantiago VelaAún no hay calificaciones
- AritméticaDocumento4 páginasAritméticaRaphael Matos Ramos100% (1)
- Silabo de Econometria - 2019-IIDocumento8 páginasSilabo de Econometria - 2019-IIGrecia Shina Lovón ChisllaAún no hay calificaciones
- Analisis Numerico - Capítulo7 PDFDocumento19 páginasAnalisis Numerico - Capítulo7 PDFLeslyIrwinAún no hay calificaciones
- Métodos y Su Metodologia de La Ciencia Económica (Diapositivas)Documento10 páginasMétodos y Su Metodologia de La Ciencia Económica (Diapositivas)Edinson Salazar Gonzalez100% (1)
- Destilacion Discontinua Rectificacion de EtanolDocumento32 páginasDestilacion Discontinua Rectificacion de Etanolmanueldidy100% (1)
- 2a y 3a Leyes de La TermodinámicaDocumento48 páginas2a y 3a Leyes de La TermodinámicaWendyAvelarAún no hay calificaciones
- 2b. Isocuanta e IsocostoDocumento12 páginas2b. Isocuanta e IsocostoDIEGO ESTUARDO AUGUSTO HONORIO QUIROZAún no hay calificaciones
- Apuntes de Lenguaje MusicalDocumento24 páginasApuntes de Lenguaje MusicalAnabella BiagAún no hay calificaciones
- Arboles y RedesDocumento38 páginasArboles y RedesKali LinuxAún no hay calificaciones
- 3° Grado - Matemática Dia 16 de AbrilDocumento9 páginas3° Grado - Matemática Dia 16 de AbrilGisella Marilù Zelaya MendozaAún no hay calificaciones
- Clase Segundo Parcial Entregable 2Documento13 páginasClase Segundo Parcial Entregable 2Hei VelázquezAún no hay calificaciones
- Tarea 7Documento9 páginasTarea 7Xavier RodríguezAún no hay calificaciones
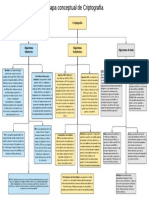
- Mapa Conceptual de CriptografíaDocumento1 páginaMapa Conceptual de CriptografíaAnonymous m1x0oMG50% (2)
- Balotario de Preguntas para El Examen Final 2do GradoDocumento7 páginasBalotario de Preguntas para El Examen Final 2do GradoPaulo cesar Ramirez AvalosAún no hay calificaciones
- Trabajo Practico de Ingenieria de Planta PDFDocumento11 páginasTrabajo Practico de Ingenieria de Planta PDFFederico OvandoAún no hay calificaciones
- 50 Ejemplos de Oraciones Con Modificador IndirectoDocumento1 página50 Ejemplos de Oraciones Con Modificador Indirectogarm3764100% (1)
- Ecuación de La DifusividadDocumento5 páginasEcuación de La DifusividadRödrigo CabreraAún no hay calificaciones
- 2da Tarea Todo 11Documento3 páginas2da Tarea Todo 11Eduardo CastañedaAún no hay calificaciones
- Clase#19Documento13 páginasClase#19Dionisio de Jesus Calero CerdaAún no hay calificaciones
- Cogollos Borrás, Santiago-Fundamentos de La Teoría de Filtros.-Editorial Universitat Politècnica de València (2016) PDFDocumento391 páginasCogollos Borrás, Santiago-Fundamentos de La Teoría de Filtros.-Editorial Universitat Politècnica de València (2016) PDFJosé Fco. VillegasAún no hay calificaciones
- RNG en ExcelDocumento4 páginasRNG en ExcelJOSE RAMIREZAún no hay calificaciones
- Resumen Logarítmicas - PDFDocumento4 páginasResumen Logarítmicas - PDFchristaAún no hay calificaciones
- Segunda Cátedra - AnterioresDocumento12 páginasSegunda Cátedra - AnterioresJUAN LOPEZAún no hay calificaciones
- Captura de Pantalla 2023-04-28 A La(s) 10.09.30Documento11 páginasCaptura de Pantalla 2023-04-28 A La(s) 10.09.30Nicole SosaAún no hay calificaciones
- Proceso de Auditoria AdministrativaDocumento19 páginasProceso de Auditoria AdministrativaAlvieliz ReyesAún no hay calificaciones
- Mate 3ro Diag. NivelaciónDocumento6 páginasMate 3ro Diag. NivelaciónRomero Aguilar Eleonai Wenote100% (1)
- Diapositivas YudiDocumento27 páginasDiapositivas Yudiyudithga garciaAún no hay calificaciones
- Visualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónDe EverandVisualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónCalificación: 5 de 5 estrellas5/5 (18)
- Fundamentos de matemática: Introducción al nivel universitarioDe EverandFundamentos de matemática: Introducción al nivel universitarioCalificación: 3 de 5 estrellas3/5 (9)
- Electricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiDe EverandElectricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiCalificación: 3.5 de 5 estrellas3.5/5 (5)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- Las matemáticas de la biología: De las celdas de las abejas a las simetrías de los virusDe EverandLas matemáticas de la biología: De las celdas de las abejas a las simetrías de los virusCalificación: 4 de 5 estrellas4/5 (1)
- Mi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaDe EverandMi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaCalificación: 5 de 5 estrellas5/5 (5)
- La Biblia de las Matemáticas RápidasDe EverandLa Biblia de las Matemáticas RápidasCalificación: 4.5 de 5 estrellas4.5/5 (19)
- Entrelazamiento cuántico y sincronicidad. Campos de fuerza, no localidad, percepciones extrasensoriales. Las sorprendentes propiedades de la física cuántica.De EverandEntrelazamiento cuántico y sincronicidad. Campos de fuerza, no localidad, percepciones extrasensoriales. Las sorprendentes propiedades de la física cuántica.Calificación: 4.5 de 5 estrellas4.5/5 (9)
- Criptografía sin secretos con Python: Spyware/Programa espíaDe EverandCriptografía sin secretos con Python: Spyware/Programa espíaCalificación: 5 de 5 estrellas5/5 (4)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- Proyectos de instalaciones eléctrica de baja tensiónDe EverandProyectos de instalaciones eléctrica de baja tensiónCalificación: 5 de 5 estrellas5/5 (1)
- Estadística básica: Introducción a la estadística con RDe EverandEstadística básica: Introducción a la estadística con RCalificación: 5 de 5 estrellas5/5 (8)
- Control automático aplicado: Prácticas de laboratorio 2da. EdiciónDe EverandControl automático aplicado: Prácticas de laboratorio 2da. EdiciónCalificación: 3.5 de 5 estrellas3.5/5 (5)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraCalificación: 4.5 de 5 estrellas4.5/5 (5)
- Aprendizaje Automático: El Aprendizaje Automático para principiantes que desean comprender aplicaciones, Inteligencia Artificial, Minería de Datos, Big Data y másDe EverandAprendizaje Automático: El Aprendizaje Automático para principiantes que desean comprender aplicaciones, Inteligencia Artificial, Minería de Datos, Big Data y másCalificación: 3.5 de 5 estrellas3.5/5 (6)
- El principio de posibilidad: Cómo la física cuántica puede mejorar tu forma de pensar, vivir y amarDe EverandEl principio de posibilidad: Cómo la física cuántica puede mejorar tu forma de pensar, vivir y amarCalificación: 4 de 5 estrellas4/5 (6)
- La Física - Aventura del pensamientoDe EverandLa Física - Aventura del pensamientoCalificación: 4.5 de 5 estrellas4.5/5 (9)
- La magia de los números: 136 recreaciones aritméticas y geométricasDe EverandLa magia de los números: 136 recreaciones aritméticas y geométricasCalificación: 1 de 5 estrellas1/5 (1)
- Matemáticas básicas con trigonometría 2 EdiciónDe EverandMatemáticas básicas con trigonometría 2 EdiciónCalificación: 4.5 de 5 estrellas4.5/5 (5)
- Matemáticas financieras y evaluación de proyectos: Segunda ediciónDe EverandMatemáticas financieras y evaluación de proyectos: Segunda ediciónAún no hay calificaciones