También podría gustarte
- Análisis Cinemático y Dinámico de Suspensión McphersonDocumento20 páginasAnálisis Cinemático y Dinámico de Suspensión McphersonMaximilianoAún no hay calificaciones
- Tarea #2 - Gutierrez - RodriguezDocumento59 páginasTarea #2 - Gutierrez - Rodriguezfernando rodriguez100% (1)
- 1.8 Cuadro Comparativo Herramientas EqDocumento7 páginas1.8 Cuadro Comparativo Herramientas EqTOÑO GONZALEZAún no hay calificaciones
- Envejecimiento y DemenciasDocumento88 páginasEnvejecimiento y DemenciasCurra Fernández Arregui75% (4)
- Universidad de Oriente. Practico IiDocumento14 páginasUniversidad de Oriente. Practico Iiangel rodriguezAún no hay calificaciones
- Lab. Mecanismo N°1Documento10 páginasLab. Mecanismo N°1TanishnakiAún no hay calificaciones
- Mecanismo 4 Barras ReporteDocumento13 páginasMecanismo 4 Barras ReporteRicardo ChanAún no hay calificaciones
- Clase #6 RealDocumento49 páginasClase #6 RealEstanislao Nguema Abaga EsahaAún no hay calificaciones
- Tipos de CoordenadasDocumento6 páginasTipos de CoordenadasLogan JD Tdf TdayAún no hay calificaciones
- 1.3 Grado de LibertadDocumento8 páginas1.3 Grado de LibertadChololo Jr BansAún no hay calificaciones
- Trabajo MecanismoDocumento7 páginasTrabajo MecanismoBrayan AriasAún no hay calificaciones
- Grados de LibertadDocumento8 páginasGrados de LibertadLucero MendozaAún no hay calificaciones
- Analisis Cinemático y Dinámico de Mecanismo Biela-ManivelaDocumento13 páginasAnalisis Cinemático y Dinámico de Mecanismo Biela-ManivelaTomás LuraschiAún no hay calificaciones
- Guía de Laboratorio 6 - MecanismosDocumento7 páginasGuía de Laboratorio 6 - MecanismosAdrian MejiasAún no hay calificaciones
- Clase 1 - Cinematica y DinamicaDocumento13 páginasClase 1 - Cinematica y DinamicaPatricio SabettaAún no hay calificaciones
- Clase 3.determinación Del Grado de Libertad o MovilidadDocumento28 páginasClase 3.determinación Del Grado de Libertad o MovilidadIvan MontoyaAún no hay calificaciones
- JACG 20200093 Portafolio Unidad 2Documento7 páginasJACG 20200093 Portafolio Unidad 2Julio Chacón GarcíaAún no hay calificaciones
- Practica 1 Grados de LibertadDocumento20 páginasPractica 1 Grados de LibertadRoberto GarcíaAún no hay calificaciones
- Practica1 - MFTDocumento5 páginasPractica1 - MFTILIDAN STORMAún no hay calificaciones
- 2.4 T. Grados de LibertadDocumento5 páginas2.4 T. Grados de LibertadMimi Flores SalazarAún no hay calificaciones
- Deber 1 - Jordan RamirezDocumento4 páginasDeber 1 - Jordan RamirezJordan RamírezAún no hay calificaciones
- Pendulo SImple Con Friccion PDFDocumento9 páginasPendulo SImple Con Friccion PDFshaka9221Aún no hay calificaciones
- Sintesis Optima de Un Mecanismo de Cinco Barras de 2-GDL Utilizando Tecnicas de InteligenciaDocumento14 páginasSintesis Optima de Un Mecanismo de Cinco Barras de 2-GDL Utilizando Tecnicas de InteligenciaADOLF HITLERAún no hay calificaciones
- Grado de Libertad (Ingenieria)Documento3 páginasGrado de Libertad (Ingenieria)VTROCELAún no hay calificaciones
- Introduccion y Sin Perdida MaterialDocumento6 páginasIntroduccion y Sin Perdida MaterialjenrryAún no hay calificaciones
- Polo & Sanchez Tarea 2Documento16 páginasPolo & Sanchez Tarea 2seebass srosrAún no hay calificaciones
- Lab. Aeroelasticidad.Documento11 páginasLab. Aeroelasticidad.Karen GabrieleAún no hay calificaciones
- Tarea de Cinematic A y Dinamica de Maquinas # 1Documento3 páginasTarea de Cinematic A y Dinamica de Maquinas # 1Oscar Montes FernándezAún no hay calificaciones
- Grados de LibertadDocumento1 páginaGrados de LibertadXav Jmz Hdez100% (1)
- Aplicaciones Teóricas Propuestas Tema 1 Libro TMM (2 Ed) (Resueltas)Documento14 páginasAplicaciones Teóricas Propuestas Tema 1 Libro TMM (2 Ed) (Resueltas)Xsds sdsdsAún no hay calificaciones
- Modelos Matemáticos Usando Ecuaciones de LagrangeDocumento18 páginasModelos Matemáticos Usando Ecuaciones de Lagrangemasb2900983% (6)
- Mecanismo 4 Barras ReporteDocumento13 páginasMecanismo 4 Barras ReporteMimi Flores Salazar100% (1)
- Modelización de Sistemas MecánicosDocumento47 páginasModelización de Sistemas MecánicosahigueraAún no hay calificaciones
- Cimentacion Grados de LibertadDocumento7 páginasCimentacion Grados de LibertadAnonymous 23SVHBAún no hay calificaciones
- Diseño Mecánico 1Documento122 páginasDiseño Mecánico 1Alexander SolanoAún no hay calificaciones
- Análisis Dinámico de Mecanismos - Evaluación n.-1Documento11 páginasAnálisis Dinámico de Mecanismos - Evaluación n.-1AlexanderAún no hay calificaciones
- ClasesDocumento39 páginasClasesOzkar PantigosoAún no hay calificaciones
- Máquinas, Mecanismos, Eslabones y Juntas.Documento32 páginasMáquinas, Mecanismos, Eslabones y Juntas.Jorge Alonso Flores ChacollaAún no hay calificaciones
- Sistemas DinamicosDocumento23 páginasSistemas DinamicosRodrigo MagallanesAún no hay calificaciones
- Grados de LibertadDocumento3 páginasGrados de LibertadYumi OshinAún no hay calificaciones
- Resumen Capitulo 2Documento16 páginasResumen Capitulo 2Elton GuadarramaAún no hay calificaciones
- Unidad 1 Teoria MecanismosDocumento32 páginasUnidad 1 Teoria MecanismosZack MoralesAún no hay calificaciones
- Uso de Algoritmo de Automatización DTWDocumento20 páginasUso de Algoritmo de Automatización DTWEnrique Mejia GamarraAún no hay calificaciones
- Reporte de Características, Especificaciones y Posición de Eslabones. (Evidencia 2)Documento10 páginasReporte de Características, Especificaciones y Posición de Eslabones. (Evidencia 2)Armando HuertaAún no hay calificaciones
- Etapa 1 Sistemas Dinámicos - BarriosDocumento16 páginasEtapa 1 Sistemas Dinámicos - BarriosLuis Alberto GilAún no hay calificaciones
- Analisis DimensionalDocumento7 páginasAnalisis DimensionalJulio VázquezAún no hay calificaciones
- S01.s2 - Grados de Movilidad - TeoríaDocumento25 páginasS01.s2 - Grados de Movilidad - TeoríaJonathanCatariAún no hay calificaciones
- S01.s2 - Grados de Movilidad - TeoríaDocumento25 páginasS01.s2 - Grados de Movilidad - TeoríaJonathanCatariAún no hay calificaciones
- Practica #5 Simulacion de Sistemas FisicosDocumento11 páginasPractica #5 Simulacion de Sistemas FisicosJulio SandovalAún no hay calificaciones
- Metodos Numericos en Analisis ModalesDocumento20 páginasMetodos Numericos en Analisis ModalesRamós Girón CarlosAún no hay calificaciones
- TEMA 1 - Topologia de MecanismosDocumento34 páginasTEMA 1 - Topologia de MecanismosChemaRosaCanovasAún no hay calificaciones
- Unidad 1 - Control de Procesos No LinealesDocumento25 páginasUnidad 1 - Control de Procesos No LinealesNadiin HenriquezAún no hay calificaciones
- Introduccion A Los Mecanismos PDFDocumento6 páginasIntroduccion A Los Mecanismos PDFMary SquerraAún no hay calificaciones
- Modelo Dinámico de Un Sistema Masa-ResorteDocumento12 páginasModelo Dinámico de Un Sistema Masa-ResorteBrian HuizarAún no hay calificaciones
- Análisis de Cinemática y MecanismosDocumento17 páginasAnálisis de Cinemática y MecanismosJohan CarminoAún no hay calificaciones
- Articulo DosDocumento25 páginasArticulo DosIsabel LastraAún no hay calificaciones
- Álgebra abstracta aplicada en ingeniería: casos de aplicación en sistemas difusos tipo 1 y tipo 2De EverandÁlgebra abstracta aplicada en ingeniería: casos de aplicación en sistemas difusos tipo 1 y tipo 2Aún no hay calificaciones
- Mecatrónica: modelado, simulación y control de sistemas físicosDe EverandMecatrónica: modelado, simulación y control de sistemas físicosAún no hay calificaciones
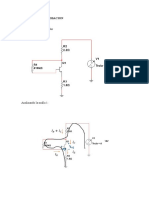
- Práctica - Circuitos - Eléctricos - 09Documento2 páginasPráctica - Circuitos - Eléctricos - 09fernando rodriguezAún no hay calificaciones
- Práctica Cónicos LEWISDocumento10 páginasPráctica Cónicos LEWISfernando rodriguezAún no hay calificaciones
- Formulario Elementos BamndasDocumento3 páginasFormulario Elementos Bamndasfernando rodriguezAún no hay calificaciones
- Ejemplo 3 - Propuesto 2 Lab ControlDocumento8 páginasEjemplo 3 - Propuesto 2 Lab Controlfernando rodriguezAún no hay calificaciones
- Práctica - Circuitos - Eléctricos - 09Documento2 páginasPráctica - Circuitos - Eléctricos - 09fernando rodriguezAún no hay calificaciones
- Práctica - Circuitos - Eléctricos - 06Documento2 páginasPráctica - Circuitos - Eléctricos - 06fernando rodriguezAún no hay calificaciones
- Ieconomica 2023Documento4 páginasIeconomica 2023fernando rodriguezAún no hay calificaciones
- Test Lab3Documento11 páginasTest Lab3fernando rodriguezAún no hay calificaciones
- Documento de FERNANDO RODRIGUEZDocumento7 páginasDocumento de FERNANDO RODRIGUEZfernando rodriguezAún no hay calificaciones
- Tarea #3 - Gutierrez - RodriguezDocumento24 páginasTarea #3 - Gutierrez - Rodriguezfernando rodriguezAún no hay calificaciones
- Rubrica TifDocumento1 páginaRubrica Tiffernando rodriguezAún no hay calificaciones
- ITABDocumento10 páginasITABFavio Royer B. MancillaAún no hay calificaciones
- Sesion 7Documento10 páginasSesion 7fernando rodriguezAún no hay calificaciones
- PLACADocumento1 páginaPLACAfernando rodriguezAún no hay calificaciones
- Tarea 1. Introducción A La Teoría de Máquinas y MecanismosDocumento3 páginasTarea 1. Introducción A La Teoría de Máquinas y Mecanismosfernando rodriguezAún no hay calificaciones
- Grafica Cb-Lab4Documento1 páginaGrafica Cb-Lab4fernando rodriguezAún no hay calificaciones
- Laboratorio Grupo7 Semana6Documento21 páginasLaboratorio Grupo7 Semana6fernando rodriguezAún no hay calificaciones
- Documento de Rinzler ?Documento13 páginasDocumento de Rinzler ?fernando rodriguezAún no hay calificaciones
- Susti IiiDocumento2 páginasSusti Iiifernando rodriguezAún no hay calificaciones
- Formulario-M eDocumento3 páginasFormulario-M efernando rodriguezAún no hay calificaciones
- Susti IDocumento2 páginasSusti Ifernando rodriguezAún no hay calificaciones
- Laboratorio 03 Grupo7 Semana 03Documento6 páginasLaboratorio 03 Grupo7 Semana 03fernando rodriguezAún no hay calificaciones
- Li - L y FL - FernandoDocumento3 páginasLi - L y FL - Fernandofernando rodriguezAún no hay calificaciones
- Item 1Documento3 páginasItem 1fernando rodriguezAún no hay calificaciones
- Item 5Documento1 páginaItem 5fernando rodriguezAún no hay calificaciones
- Documento de Rinzler ?Documento16 páginasDocumento de Rinzler ?fernando rodriguezAún no hay calificaciones
- Documento de Rinzler ?Documento4 páginasDocumento de Rinzler ?fernando rodriguezAún no hay calificaciones
- Item 3Documento1 páginaItem 3fernando rodriguezAún no hay calificaciones
- TallerDocumento2 páginasTallerJEYSSER SEBASTIAN ROJAS CARRILLOAún no hay calificaciones
- Tema 4-Los Valores Del Reino - Jueves 24 Feb 22Documento3 páginasTema 4-Los Valores Del Reino - Jueves 24 Feb 22Ciro Naun Brown HernandezAún no hay calificaciones
- Documento Sin TítuloDocumento2 páginasDocumento Sin TítuloDaniel FernandezAún no hay calificaciones
- Mapa Mental VientosDocumento2 páginasMapa Mental VientosAndres AlarconAún no hay calificaciones
- Procesos Sesoriales APADocumento33 páginasProcesos Sesoriales APAfranktav12Aún no hay calificaciones
- Informe Alcoholismo MejorDocumento9 páginasInforme Alcoholismo MejorRodrigo PuentesAún no hay calificaciones
- Tarea-3-Fundamentos Filosoficos de La EducacionDocumento4 páginasTarea-3-Fundamentos Filosoficos de La EducacionPAMELA GARCIAAún no hay calificaciones
- Psicología LatinoamericanaDocumento2 páginasPsicología LatinoamericanaNICOL ALONDRA SULLCAHUAMAN RUIZ100% (1)
- El Discurso Argumentativo - Perspectiva Analítica y PragmáticaDocumento19 páginasEl Discurso Argumentativo - Perspectiva Analítica y PragmáticaelozanovaAún no hay calificaciones
- La Auditoria OperacionalDocumento22 páginasLa Auditoria OperacionalLiliana CarreñoAún no hay calificaciones
- Rubrica para LapbookDocumento1 páginaRubrica para LapbookYanet Figueroa Carrasco100% (1)
- Biografía de Giordano BrunoDocumento4 páginasBiografía de Giordano BrunoPaola Gabriela Jiménez AndradeAún no hay calificaciones
- 008 2003 Ai TCDocumento33 páginas008 2003 Ai TCDANNY DANIELAún no hay calificaciones
- Codigo Del TrabajoDocumento113 páginasCodigo Del TrabajoDavid Marcelo Celis GarridoAún no hay calificaciones
- ProblemasDocumento8 páginasProblemasJosé MendozaAún no hay calificaciones
- Manual Fiebre AmarillaDocumento60 páginasManual Fiebre AmarillaJimena CamachoAún no hay calificaciones
- Ficha Tecnica MamónDocumento1 páginaFicha Tecnica MamónlindaAún no hay calificaciones
- 4to La Forma 2020 - IBiDocumento5 páginas4to La Forma 2020 - IBiblascojoseluisAún no hay calificaciones
- La Tentación de San AntonioDocumento13 páginasLa Tentación de San AntonioGabriela Reboreda NavaAún no hay calificaciones
- La Política Internacional ExamenDocumento4 páginasLa Política Internacional ExamenDiana PatriciaAún no hay calificaciones
- Guia Rentabilidad PDFDocumento49 páginasGuia Rentabilidad PDFJulian ParraAún no hay calificaciones
- Fase 1 - ContextualizaciónDocumento8 páginasFase 1 - ContextualizaciónPapeleria J2 SotaquiraAún no hay calificaciones
- Proyecto de Investigación 01 - Basura en Manta y EcuadorDocumento21 páginasProyecto de Investigación 01 - Basura en Manta y EcuadorarielochoagAún no hay calificaciones
- Reflexion Evaluacion y Areas de OportunidadDocumento2 páginasReflexion Evaluacion y Areas de OportunidadCarlos Jesus Ucan SegoviaAún no hay calificaciones
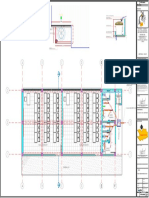
- Hidrosanitario Aulas-Inst-Aul-01aDocumento1 páginaHidrosanitario Aulas-Inst-Aul-01aFredy PereaAún no hay calificaciones
- Articulo 12 InterculturalidadDocumento4 páginasArticulo 12 InterculturalidadlorenaAún no hay calificaciones
- FimeDocumento8 páginasFimeDayana GarcíaAún no hay calificaciones
- Ejemplo Costo Promedio Ponderado de CapitalDocumento4 páginasEjemplo Costo Promedio Ponderado de CapitalJohana Olaya0% (1)