También podría gustarte
- Laboratorio 05Documento10 páginasLaboratorio 05Nick Stiven Aguilar HuarangaAún no hay calificaciones
- Controlador en El Espacio de Estados para Un Sistema de Suspensión de Un AutobusDocumento10 páginasControlador en El Espacio de Estados para Un Sistema de Suspensión de Un AutobusFrank Huaylinos VelasquezAún no hay calificaciones
- Sistema Ball and Beam Modelado y SimulaciónDocumento12 páginasSistema Ball and Beam Modelado y SimulaciónGregory Cárdenas-Mansilla100% (1)
- INFORME N°10: Simscape para ControlDocumento12 páginasINFORME N°10: Simscape para ControlMarcelo Quispe CcachucoAún no hay calificaciones
- Ejercicios Controladores PidDocumento71 páginasEjercicios Controladores PidJosue Tuz Poot100% (2)
- UNIDAD 2 - Senales y Sistemas DiscretosDocumento50 páginasUNIDAD 2 - Senales y Sistemas DiscretosJavier Paico MataAún no hay calificaciones
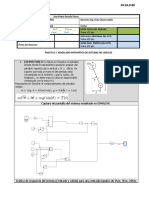
- Practica 1 Modelado Matematico de Sistemas LinealesDocumento3 páginasPractica 1 Modelado Matematico de Sistemas LinealesJOSE PEDRO ORTUÑO FLORESAún no hay calificaciones
- Capitulo IVDocumento56 páginasCapitulo IVEdwin Alexander Duran ParraAún no hay calificaciones
- Sistemas de Control de Un AvionDocumento7 páginasSistemas de Control de Un AvionFernanda MorenoAún no hay calificaciones
- Prueba 1 (Suspensión Activa) PDFDocumento8 páginasPrueba 1 (Suspensión Activa) PDFEve QuillupanguiAún no hay calificaciones
- Practica SistContDocumento23 páginasPractica SistContEmanuel CrespoAún no hay calificaciones
- DDS - MARTINEZ - RUIZ JOSÉ DANIEL - Proyecto FinalDocumento10 páginasDDS - MARTINEZ - RUIZ JOSÉ DANIEL - Proyecto FinalJosé Daniel Martínez RuizAún no hay calificaciones
- Informe Del 2Documento7 páginasInforme Del 2Alejandro Tello VargasAún no hay calificaciones
- Proyecto Motor DCDocumento5 páginasProyecto Motor DCMarlon BoknegraAún no hay calificaciones
- Taller (I) - SoluciónDocumento47 páginasTaller (I) - SoluciónJairo Andres GuaquetaAún no hay calificaciones
- Deber 3 Sistemas de Control-3Documento7 páginasDeber 3 Sistemas de Control-3walther lopez zhunioAún no hay calificaciones
- FASE 4 Grupo 243005 44Documento31 páginasFASE 4 Grupo 243005 44Duvan RuizAún no hay calificaciones
- Proyectos Control 2019Documento12 páginasProyectos Control 2019Jorge Alberto Palacios100% (1)
- Sistema de Nivelación AutomáticoDocumento8 páginasSistema de Nivelación AutomáticoHenry AjquejayAún no hay calificaciones
- Informe Segundo Parcial ControlDocumento21 páginasInforme Segundo Parcial ControlAndrés SolísAún no hay calificaciones
- Examenes Rae 0708Documento40 páginasExamenes Rae 0708Milton Fonseca ZuritaAún no hay calificaciones
- Labo03-Mat Apl ElecDocumento19 páginasLabo03-Mat Apl ElecLuis Carlos Garcia PeraltaAún no hay calificaciones
- Control de CascadaDocumento17 páginasControl de CascadajimAún no hay calificaciones
- Sistemas de ControDocumento26 páginasSistemas de ControJORGE ARIEL CHICAIZA CHILUIZAAún no hay calificaciones
- Tarea 4 - Angie Mora-Control. UNADDocumento14 páginasTarea 4 - Angie Mora-Control. UNADVanessa MoraAún no hay calificaciones
- Modelos MatematicosDocumento18 páginasModelos MatematicosAlonso Herrera AguilarAún no hay calificaciones
- Preinforme - Práctica de Control Grupo DDocumento23 páginasPreinforme - Práctica de Control Grupo DDiego Fernando CuellarAún no hay calificaciones
- PROYECTOfinales Control-Analogico-I 2014 Pte 1 BDocumento7 páginasPROYECTOfinales Control-Analogico-I 2014 Pte 1 BestebanAún no hay calificaciones
- Suspencion ActivaDocumento5 páginasSuspencion ActivaJhoan Sebastian Muñoz JaramilloAún no hay calificaciones
- Sistema Suspensión Auto Eq9Documento5 páginasSistema Suspensión Auto Eq9Yanai HidalgoAún no hay calificaciones
- Del Control Bang Bang Al SMCDocumento15 páginasDel Control Bang Bang Al SMCRuben RaygosaAún no hay calificaciones
- Informe AmortiguadorDocumento8 páginasInforme AmortiguadorAlfredo Oña100% (1)
- Simulink y MatlabDocumento16 páginasSimulink y MatlabSamuel Granados MejíaAún no hay calificaciones
- ACTIVIDAD 2 - Representación en Espacio de EstadoDocumento13 páginasACTIVIDAD 2 - Representación en Espacio de EstadoJorge Esteban Martínez MacancelaAún no hay calificaciones
- Acondicionamiento de SeñalesDocumento9 páginasAcondicionamiento de SeñalesAllison ElianaAún no hay calificaciones
- Calculo Impedancias de Secuencia PDFDocumento10 páginasCalculo Impedancias de Secuencia PDFjanpol_uniAún no hay calificaciones
- Lab 2 Transformada Laplace 2018Documento9 páginasLab 2 Transformada Laplace 2018MumulAún no hay calificaciones
- Sistemas Eléctricos 2Documento7 páginasSistemas Eléctricos 2Andres S De la HozAún no hay calificaciones
- Informe de Laboratorio (Coeficiente de Amortiguamiento) - Modelamiento de SistemasDocumento19 páginasInforme de Laboratorio (Coeficiente de Amortiguamiento) - Modelamiento de SistemasSebastian PuertaAún no hay calificaciones
- Lab - N°01 - 2021 ADocumento4 páginasLab - N°01 - 2021 AJordanSplitWairerAún no hay calificaciones
- Informe Examen FinalDocumento15 páginasInforme Examen FinalGustavo CeccarelliAún no hay calificaciones
- SimulinkDocumento12 páginasSimulinkJeanpBalbinAún no hay calificaciones
- UNIDAD II Funcion de TransferenciaDocumento54 páginasUNIDAD II Funcion de TransferenciaDavid Jose GodoyAún no hay calificaciones
- Practica SERVOMECANISMO NEUMÁTICODocumento10 páginasPractica SERVOMECANISMO NEUMÁTICOClara CastilloAún no hay calificaciones
- Hoja de Problemas #3 MecánicaDocumento5 páginasHoja de Problemas #3 MecánicaFidel Andía GuzmánAún no hay calificaciones
- No SeDocumento48 páginasNo SeAgustin BerAún no hay calificaciones
- Control de Posicion de Un Balancin Con ADocumento6 páginasControl de Posicion de Un Balancin Con AMiguel El BarbaroAún no hay calificaciones
- Ejercicios Controladores PidDocumento70 páginasEjercicios Controladores PidJulita Nelson GordonAún no hay calificaciones
- Taller Modelado Matlab PDFDocumento16 páginasTaller Modelado Matlab PDFJose BaqueroAún no hay calificaciones
- p2. Oscilador de Van Der PolDocumento4 páginasp2. Oscilador de Van Der PolibalamrmAún no hay calificaciones
- Lab2-Sistemas CombinadosDocumento11 páginasLab2-Sistemas CombinadosGabriel MarmolejoAún no hay calificaciones
- Modelamiento Matematico de Sistemas Matlab PDFDocumento12 páginasModelamiento Matematico de Sistemas Matlab PDFjuan carlos revillaAún no hay calificaciones
- Lab 2Documento11 páginasLab 2Dio21Aún no hay calificaciones
- Cuaderno Practicas Neumática - 23 - 24Documento8 páginasCuaderno Practicas Neumática - 23 - 24filipiousAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- Evaluación de Alternativas - CuantitativoDocumento1 páginaEvaluación de Alternativas - CuantitativoJOSE PEDRO ORTUÑO FLORESAún no hay calificaciones
- Servicio de Limpieza Universidad Privada Franz TamayoDocumento18 páginasServicio de Limpieza Universidad Privada Franz TamayoJOSE PEDRO ORTUÑO FLORESAún no hay calificaciones
- Laboratorio1 - Envio de Datos de Esp32 A Base de Datos Firebase y Lectura Por Otro Modulo Esp32 Desde La Base de DatosDocumento19 páginasLaboratorio1 - Envio de Datos de Esp32 A Base de Datos Firebase y Lectura Por Otro Modulo Esp32 Desde La Base de DatosJOSE PEDRO ORTUÑO FLORESAún no hay calificaciones
- SRWE Module 9Documento18 páginasSRWE Module 9JOSE PEDRO ORTUÑO FLORESAún no hay calificaciones
- Practica 2 Modelado Matematico de Sistemas No LinealesDocumento6 páginasPractica 2 Modelado Matematico de Sistemas No LinealesJOSE PEDRO ORTUÑO FLORESAún no hay calificaciones
- Practica 1 Lugar de RaicesDocumento2 páginasPractica 1 Lugar de RaicesJOSE PEDRO ORTUÑO FLORESAún no hay calificaciones
- Ingenieria de Software IIDocumento4 páginasIngenieria de Software IIJOSE PEDRO ORTUÑO FLORESAún no hay calificaciones
- Semaforo de 2 Carrieles Con Paso PeatonalDocumento3 páginasSemaforo de 2 Carrieles Con Paso PeatonalJOSE PEDRO ORTUÑO FLORESAún no hay calificaciones
- Gestion de Riesgos-1Documento4 páginasGestion de Riesgos-1JOSE PEDRO ORTUÑO FLORESAún no hay calificaciones
- Practica Formularios-1Documento5 páginasPractica Formularios-1JOSE PEDRO ORTUÑO FLORESAún no hay calificaciones
- Análisis Del ProyectoDocumento2 páginasAnálisis Del ProyectoJOSE PEDRO ORTUÑO FLORESAún no hay calificaciones
- Diodos de Potencia - EcuRed PDFDocumento1 páginaDiodos de Potencia - EcuRed PDFisma_jose_mlAún no hay calificaciones
- Difraccion de Rayos XDocumento4 páginasDifraccion de Rayos XMagda MontielAún no hay calificaciones
- SegmentosDocumento6 páginasSegmentossebar.gluuAún no hay calificaciones
- Toma y Registro de ECGDocumento5 páginasToma y Registro de ECGKiara100% (1)
- Escaneos - 1671902417917 - TRONCO DE PIRÁMIDE - GEOMETRÍADocumento2 páginasEscaneos - 1671902417917 - TRONCO DE PIRÁMIDE - GEOMETRÍAOrlando LozanoAún no hay calificaciones
- 45 0226 IcDocumento280 páginas45 0226 IcmigusagoAún no hay calificaciones
- Requisitos de Fuerza en Forja de Polímeros CristalinosDocumento6 páginasRequisitos de Fuerza en Forja de Polímeros CristalinosMiranda BenavidesAún no hay calificaciones
- Deflexión en Vigas Mecanica de SolidosDocumento1 páginaDeflexión en Vigas Mecanica de SolidosJefry CruzAún no hay calificaciones
- Informe Determinación Del Coeficiente de Fricción EstáticoDocumento3 páginasInforme Determinación Del Coeficiente de Fricción EstáticoSebastianEsguerraAún no hay calificaciones
- Tarea Galvan Semana 13Documento16 páginasTarea Galvan Semana 13MAICOL ALEXANDER MELGAREJO MEDINAAún no hay calificaciones
- Estadistica - EspacialDocumento19 páginasEstadistica - EspacialYerlen Carolina Cabarcas RodríguezAún no hay calificaciones
- Sistemas de Control de Ruido Acústico Mediante Técnicas Adaptativas-1Documento8 páginasSistemas de Control de Ruido Acústico Mediante Técnicas Adaptativas-1Emmanuel Falconi BernalAún no hay calificaciones
- Lennox - Ceiling FloorDocumento2 páginasLennox - Ceiling Floorruy100% (1)
- Guia PH y Soluciones Buffer MEDICINADocumento8 páginasGuia PH y Soluciones Buffer MEDICINAViviana Luna0% (1)
- XX - Copia de 4 - Quimica II 1roDocumento29 páginasXX - Copia de 4 - Quimica II 1roRenzo AntonioAún no hay calificaciones
- La Gravedad BasicoDocumento8 páginasLa Gravedad BasicoAli Ala Sufa TerrenoAún no hay calificaciones
- Informe - Aplicaciones en La Industria de La Segunda Ley de La Termodinámica - Entropía - Grupo - Los TermodinámicosDocumento11 páginasInforme - Aplicaciones en La Industria de La Segunda Ley de La Termodinámica - Entropía - Grupo - Los TermodinámicosvimarAún no hay calificaciones
- Encendidos Electrónicos IntegralesDocumento71 páginasEncendidos Electrónicos IntegralesJuan David DiazAún no hay calificaciones
- Taller Trazo de CurvasDocumento2 páginasTaller Trazo de CurvasDarío Andrés Pineda Gómez100% (1)
- Michael Jordan Un Tipo Con Mucha Quimica 2Documento5 páginasMichael Jordan Un Tipo Con Mucha Quimica 2amoa chifuyuAún no hay calificaciones
- CV para RellenarDocumento1 páginaCV para RellenareliberismoAún no hay calificaciones
- Lectura 1 Temperatura RuidoDocumento19 páginasLectura 1 Temperatura RuidojuanAún no hay calificaciones
- 4 Fisica Aplicada y Energia Solar - Fotovoltaica UTN 2018Documento39 páginas4 Fisica Aplicada y Energia Solar - Fotovoltaica UTN 2018Gustavo BessoneAún no hay calificaciones
- Portafafolio 1 - Principios de ElectronicaDocumento10 páginasPortafafolio 1 - Principios de ElectronicaAngelica BlandonAún no hay calificaciones
- Ejemplo Steam TracingDocumento2 páginasEjemplo Steam TracinglissettejimenezAún no hay calificaciones
- Pendulo DobleDocumento16 páginasPendulo DobleCarlos PerdomoAún no hay calificaciones
- Materiales en OdontopediatriaDocumento98 páginasMateriales en OdontopediatriaCésar Jiménez RiveraAún no hay calificaciones
- Tema 1.1. 2021Documento53 páginasTema 1.1. 2021Tassnim LabbassiAún no hay calificaciones
- Foro #02 - Sesión 02Documento3 páginasForo #02 - Sesión 02Ingpahuer GeodeciaAún no hay calificaciones