También podría gustarte
- El Espíritu Santo en La Biblia SintesisDocumento5 páginasEl Espíritu Santo en La Biblia SintesisJolver SPAún no hay calificaciones
- Análisis de Precios Unitarios: CONCRETO EN ZAPATAS F'C 175 KG/CM C/H 1/10 + 30% Piedra Grande 25.00 8Documento6 páginasAnálisis de Precios Unitarios: CONCRETO EN ZAPATAS F'C 175 KG/CM C/H 1/10 + 30% Piedra Grande 25.00 8MilagrosAún no hay calificaciones
- Osteologia Involucrada en ProstodonciaDocumento17 páginasOsteologia Involucrada en Prostodonciayes7_somoAún no hay calificaciones
- Postraciones-a-los-35-Budas, Sutra de Las Tres CúmulosDocumento4 páginasPostraciones-a-los-35-Budas, Sutra de Las Tres CúmuloschamantetianaAún no hay calificaciones
- Canciones PatriasDocumento11 páginasCanciones PatriasLiliana Elizabeth CascoAún no hay calificaciones
- Las Cámaras Digitales AéreasDocumento23 páginasLas Cámaras Digitales AéreasJabes Abner Toribio100% (1)
- Orientación Interna o InteriorDocumento16 páginasOrientación Interna o InteriorFaustho Arce Gomez100% (1)
- Introduccion Al PaisajismoDocumento48 páginasIntroduccion Al PaisajismoAle100% (3)
- WaisDocumento55 páginasWaisJulianaAún no hay calificaciones
- D Agcindicesweblibtslab07Documento20 páginasD Agcindicesweblibtslab07Laura Natalia Cárdenas GuerraAún no hay calificaciones
- El Plan de Seguridad y Salud en Obras de ConstrucciónDocumento6 páginasEl Plan de Seguridad y Salud en Obras de ConstrucciónPaolo Miguel RuizAún no hay calificaciones
- Test Final - Unidad 3 (Página 1 de 2)Documento3 páginasTest Final - Unidad 3 (Página 1 de 2)DENISEE KATHERINE RODRIGUEZ GUERREROAún no hay calificaciones
- Proceso de Restitucion (PEP2) - 2Documento31 páginasProceso de Restitucion (PEP2) - 2Alex AlanezAún no hay calificaciones
- Algoritmo de MapeoDocumento22 páginasAlgoritmo de MapeoCRISTIAN FLOREZ TRASLAVINAAún no hay calificaciones
- Orientación InteriorDocumento17 páginasOrientación InteriorAlexia Dagnino0% (1)
- Aerotriangulación Por HacesDocumento4 páginasAerotriangulación Por HacesRonaldoAún no hay calificaciones
- Calibracion CamaraDocumento2 páginasCalibracion CamaraSergio Alejandro Roa MartinAún no hay calificaciones
- Fundamentos de La Restitución FotogrametricaDocumento6 páginasFundamentos de La Restitución FotogrametricaCarlos Oliver Echalar Olmos0% (1)
- Localización Espacial de Un Punto en XyzDocumento13 páginasLocalización Espacial de Un Punto en XyzAlejandra ValladaresAún no hay calificaciones
- Modelo de cámara estenopeica: Comprender la perspectiva a través de la óptica computacionalDe EverandModelo de cámara estenopeica: Comprender la perspectiva a través de la óptica computacionalAún no hay calificaciones
- 1 Restitucion Analogica y SemianaliticaDocumento44 páginas1 Restitucion Analogica y SemianaliticaInnsats Es Suksess100% (1)
- Fotogrametría Digital - 2005Documento23 páginasFotogrametría Digital - 2005equiros72Aún no hay calificaciones
- Orientación InternaDocumento14 páginasOrientación InternaJuan Luis MorrisonAún no hay calificaciones
- Presentacion Reconstrucción 3DDocumento47 páginasPresentacion Reconstrucción 3Dserrano5510Aún no hay calificaciones
- 02 El Proceso FotogrametricoDocumento60 páginas02 El Proceso FotogrametricoKaren ETAún no hay calificaciones
- Preguntas Auxilitaura de Restitucion Aux Jhonny Yomar Vasquez Conde 12Documento8 páginasPreguntas Auxilitaura de Restitucion Aux Jhonny Yomar Vasquez Conde 12Dany M. MarqAún no hay calificaciones
- Clasificación de Instrumentos de RestituciónDocumento8 páginasClasificación de Instrumentos de RestituciónAlexis CabreraAún no hay calificaciones
- INVESTIGACION - TopografiaDocumento4 páginasINVESTIGACION - TopografiaAmayraniElizabethCanAún no hay calificaciones
- #3 Informe Fotogrametría PDFDocumento30 páginas#3 Informe Fotogrametría PDFMaryi Daniela HernandezAún no hay calificaciones
- Ortofotogrametria Digital KindleDocumento16 páginasOrtofotogrametria Digital KindleLimber LozaAún no hay calificaciones
- Evaluación y Georreferenciación de Productos Fotogramétricos Con Dron Aplicando Puntos de Control Terrestre.Documento18 páginasEvaluación y Georreferenciación de Productos Fotogramétricos Con Dron Aplicando Puntos de Control Terrestre.Wilbert CruzAún no hay calificaciones
- Correcciones GeometricasDocumento19 páginasCorrecciones Geometricasshine_rose29Aún no hay calificaciones
- Correccion A Las Imagenes Satelitales PDFDocumento10 páginasCorreccion A Las Imagenes Satelitales PDFJakelyne IrinaAún no hay calificaciones
- Restitucion 2-2020Documento14 páginasRestitucion 2-2020Edwin LujanoAún no hay calificaciones
- FOTOGRAMETRÍADocumento29 páginasFOTOGRAMETRÍARottman Montaño DelgadoAún no hay calificaciones
- TEMA 10 OrtofotogrametriaDocumento29 páginasTEMA 10 OrtofotogrametriappantorrillaAún no hay calificaciones
- Modelacion Digital Del TerrenoDocumento21 páginasModelacion Digital Del TerrenoAlex AlanezAún no hay calificaciones
- Diferentes EdicionesDocumento25 páginasDiferentes EdicionesLuis Angel Garay CamachoAún no hay calificaciones
- Corrección Geométrica PDFDocumento67 páginasCorrección Geométrica PDFDavid Enríquez CubillasAún no hay calificaciones
- Camaras Digitales y ScanerDocumento45 páginasCamaras Digitales y ScanerJosue TPAún no hay calificaciones
- FotII-02-Parametros de La CámaraDocumento80 páginasFotII-02-Parametros de La Cámaradoa pyAún no hay calificaciones
- Fotogrametría DigitalDocumento13 páginasFotogrametría DigitalJabes Abner ToribioAún no hay calificaciones
- Fotogrametria DigitalDocumento43 páginasFotogrametria DigitalCRISTIAN DAVID NI�O GONZALEZAún no hay calificaciones
- Fotogrametría DigitalDocumento9 páginasFotogrametría DigitalGina CoteAún no hay calificaciones
- 1 Restitucion Analogica y SemianaliticaDocumento46 páginas1 Restitucion Analogica y SemianaliticaguillermoAún no hay calificaciones
- RESTIDocumento40 páginasRESTIAbad QuispeAún no hay calificaciones
- Manual Técnico para Generación de OrtoimágenesDocumento38 páginasManual Técnico para Generación de OrtoimágenesVADIMR05Aún no hay calificaciones
- Calculo de Distancia de ObjetosDocumento16 páginasCalculo de Distancia de ObjetosNickolae Quintanilla ChavezAún no hay calificaciones
- Fotogrametria InformeDocumento26 páginasFotogrametria InformejurikoAún no hay calificaciones
- Aerotriangulacion Por Modelos IndependientesDocumento5 páginasAerotriangulacion Por Modelos Independientesmargarita sequeaAún no hay calificaciones
- Diferencias Entre Lineal y MatricialDocumento8 páginasDiferencias Entre Lineal y MatricialJorge AlessandriAún no hay calificaciones
- Elaboracion Del Plan de VueloDocumento12 páginasElaboracion Del Plan de VueloThe GzuXAún no hay calificaciones
- Montaje FotogrametricoDocumento23 páginasMontaje FotogrametricoJhonatan SuárezAún no hay calificaciones
- Maquina CMM-2014-1 (Modo de Compatibilidad)Documento8 páginasMaquina CMM-2014-1 (Modo de Compatibilidad)Amy HansenAún no hay calificaciones
- Características de Las Cámaras AereasDocumento5 páginasCaracterísticas de Las Cámaras AereasManuel PeñalozaAún no hay calificaciones
- Trabajo de FotogrametriaDocumento9 páginasTrabajo de FotogrametriaChards Díaz HerreraAún no hay calificaciones
- Cálculo de La Dinámica Del Brazo Robótico y Reconocimiento de ImagenesDocumento35 páginasCálculo de La Dinámica Del Brazo Robótico y Reconocimiento de ImagenesRamiro rdzAún no hay calificaciones
- Determinacion de Escala en Fotografia AereaDocumento10 páginasDeterminacion de Escala en Fotografia AereaBruno More ValdiviaAún no hay calificaciones
- DESARROLLO DE EQUIPOS DE FOTOGRAMETRÍA - Docx Informe.................Documento19 páginasDESARROLLO DE EQUIPOS DE FOTOGRAMETRÍA - Docx Informe.................Izquierdo SadithAún no hay calificaciones
- Transferencia de PuntosDocumento6 páginasTransferencia de PuntosPaul Bazan HurtadoAún no hay calificaciones
- Documentacion Extraccion de Minucias y MatchingDocumento22 páginasDocumentacion Extraccion de Minucias y MatchingGastón MigoneAún no hay calificaciones
- Etapas de La FotogrametriaDocumento2 páginasEtapas de La FotogrametriaJacinto Arano SAún no hay calificaciones
- Informe de Fotogrametria FinalDocumento23 páginasInforme de Fotogrametria FinalErquin Beleño Pitti50% (2)
- Preguntas de FotogrametriaDocumento3 páginasPreguntas de FotogrametriaSrsAún no hay calificaciones
- FOTOGRAMETRÍADocumento6 páginasFOTOGRAMETRÍAAnonymous bAWf7WAún no hay calificaciones
- S11.s1-Puntos de Control en FotogrametriaDocumento22 páginasS11.s1-Puntos de Control en FotogrametriaStay BeAún no hay calificaciones
- Tarea #7 Equipos de Restitución Fotogramétrica Jakeline GomezDocumento4 páginasTarea #7 Equipos de Restitución Fotogramétrica Jakeline GomezJakeline GomezAún no hay calificaciones
- Medición de Objetos Planos Con Una CamaracalibradaDocumento9 páginasMedición de Objetos Planos Con Una CamaracalibradaRubiany Gonzalez QuiñonezAún no hay calificaciones
- Visión estéreo por computadora: Explorando la percepción de profundidad en la visión por computadoraDe EverandVisión estéreo por computadora: Explorando la percepción de profundidad en la visión por computadoraAún no hay calificaciones
- Matriz fundamental de visión por computadora: Por favor, sugiera un subtítulo para un libro con el título 'Matriz fundamental de visión por computadora' dentro del ámbito de 'Visión por computadora'. El subtítulo sugerido no debe tener ':'.De EverandMatriz fundamental de visión por computadora: Por favor, sugiera un subtítulo para un libro con el título 'Matriz fundamental de visión por computadora' dentro del ámbito de 'Visión por computadora'. El subtítulo sugerido no debe tener ':'.Aún no hay calificaciones
- 20 21 - Clase - Boca - Faringe - Lengua 2019Documento64 páginas20 21 - Clase - Boca - Faringe - Lengua 2019Leilani Maryori SandovalAún no hay calificaciones
- BRONQUITISDocumento7 páginasBRONQUITISMarco Antonio Cabana MezaAún no hay calificaciones
- Fotocélula Omron E3s-LDocumento3 páginasFotocélula Omron E3s-LJEVG1Aún no hay calificaciones
- CuecaDocumento9 páginasCuecaclaudioAún no hay calificaciones
- Nosofóbicos: Es Decir, de Enfermedad o ContaminaciónDocumento5 páginasNosofóbicos: Es Decir, de Enfermedad o ContaminaciónTHALIA CECILIA GALLEGOS DELEGAún no hay calificaciones
- Atlas Hotel Hoian: Vo Trong Nghia Architects - ArchDaily ColombiaDocumento11 páginasAtlas Hotel Hoian: Vo Trong Nghia Architects - ArchDaily ColombiaEdwin Adrian Diaz JimenezAún no hay calificaciones
- Quiz Medicina Preventiva Semana 3Documento6 páginasQuiz Medicina Preventiva Semana 3CAROLINA ECHAVARRIAAún no hay calificaciones
- EFSRTDocumento3 páginasEFSRTDuilio NinaAún no hay calificaciones
- Manual de Operaciones Foullard SantaStrechDocumento25 páginasManual de Operaciones Foullard SantaStrechOGAún no hay calificaciones
- Implementacion Gestion Por Procesos Caac - Iess - QuitoDocumento478 páginasImplementacion Gestion Por Procesos Caac - Iess - QuitoJose ViincesAún no hay calificaciones
- JabaSat Renta Telefonos SatelitalesDocumento3 páginasJabaSat Renta Telefonos SatelitalesJabaSatAún no hay calificaciones
- Determinación de Gasolina en Una Escena Del CrimenDocumento8 páginasDeterminación de Gasolina en Una Escena Del CrimenLuis Carlos GuadarramaAún no hay calificaciones
- Expo Fisio Endositosis, Exo y TransiDocumento17 páginasExpo Fisio Endositosis, Exo y TransiEduardo RenteriaAún no hay calificaciones
- 4° Año-Teoría 20Documento2 páginas4° Año-Teoría 20Jackson López LaviAún no hay calificaciones
- Bujías de Pedro SalinasDocumento2 páginasBujías de Pedro SalinasSALANCA2Aún no hay calificaciones
- Syllabus Coordinacion de Aislamiento 2019-3Documento7 páginasSyllabus Coordinacion de Aislamiento 2019-3Juan Carlos Aponte GutierrezAún no hay calificaciones
- ID 8.3.2.11 Procedimiento de Reparacion de Stick Balde RH 200Documento18 páginasID 8.3.2.11 Procedimiento de Reparacion de Stick Balde RH 200alvaro riveraAún no hay calificaciones
- Matriz Dofa RseDocumento1 páginaMatriz Dofa RseHector ValenciaAún no hay calificaciones
- Catequesis TODOS LOS ANGELESDocumento111 páginasCatequesis TODOS LOS ANGELESJaime MorenoAún no hay calificaciones
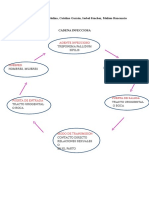
- Presentado Por: Jessica Molina, Catalina Garzón, Isabel Sánchez, Melissa Roncancio Ficha: 1905715 Cadena InfecciosaDocumento3 páginasPresentado Por: Jessica Molina, Catalina Garzón, Isabel Sánchez, Melissa Roncancio Ficha: 1905715 Cadena InfecciosaLaura Melissa Roncancio AlvaradoAún no hay calificaciones