También podría gustarte
- Ejercicios 9.6.3) P0 A6Documento17 páginasEjercicios 9.6.3) P0 A6Tania RoblesAún no hay calificaciones
- Microsoldadura Básico Intermedio Nivel ElectronicoDocumento84 páginasMicrosoldadura Básico Intermedio Nivel ElectronicoNolberto Matias Del PuertoAún no hay calificaciones
- Semana 16 DINÁMICA DEL CUERPO RÍGIDODocumento75 páginasSemana 16 DINÁMICA DEL CUERPO RÍGIDOWalter Lauro Perez TerrelAún no hay calificaciones
- 001.12 Capacitación ODIDocumento10 páginas001.12 Capacitación ODIJohannette IllanesAún no hay calificaciones
- FisiologiaResonancial PDFDocumento10 páginasFisiologiaResonancial PDFNatalia NuñezAún no hay calificaciones
- Informe 7 FisicaDocumento22 páginasInforme 7 FisicaKeny EncaladaAún no hay calificaciones
- Rapidez de Mezclado, Grado de Segregación 1Documento24 páginasRapidez de Mezclado, Grado de Segregación 1Sebastian Filián100% (1)
- DINÁMICA Semana 8Documento37 páginasDINÁMICA Semana 8ANTHONY OMAR SANTIN HERRERAAún no hay calificaciones
- Pendulo Fisico Sin ConclusionesDocumento10 páginasPendulo Fisico Sin ConclusionesNICOLAS SANCHEZ GOMEZAún no hay calificaciones
- UntitledDocumento18 páginasUntitledjuanes estebanAún no hay calificaciones
- Guía Centro de GravedadDocumento13 páginasGuía Centro de GravedadVicente VargasAún no hay calificaciones
- Fundamentos de La Mecanica ClásicaDocumento16 páginasFundamentos de La Mecanica ClásicaSalvador Ismael Mora ValenciaAún no hay calificaciones
- Mecanica DinamicaDocumento6 páginasMecanica Dinamicaj.m.vilchesruz02Aún no hay calificaciones
- Tema 6 Dinámica de La PartículaDocumento12 páginasTema 6 Dinámica de La PartículaGuillermo Martínez RamónAún no hay calificaciones
- Mecanica ClasicaDocumento16 páginasMecanica ClasicaNicolas Cardona MunozAún no hay calificaciones
- CAPÍTULO 01 H0361-2014-2 IntranetDocumento31 páginasCAPÍTULO 01 H0361-2014-2 IntranetManuel SaavedraAún no hay calificaciones
- Taller Sobre Suma y Producto de Verctores en El Plano y EspacioDocumento12 páginasTaller Sobre Suma y Producto de Verctores en El Plano y EspacioJUAN JOSE RIVERA SUAREZAún no hay calificaciones
- Semana 01 - Estatica - Ug - 2022-1Documento33 páginasSemana 01 - Estatica - Ug - 2022-1Sheyla VergaraAún no hay calificaciones
- Semana 16 DINÁMICA DEL CUERPO RÍGIDODocumento75 páginasSemana 16 DINÁMICA DEL CUERPO RÍGIDOElvis CalderonAún no hay calificaciones
- Práctica 2Documento9 páginasPráctica 2ANDRES FELIPE PORTILLA MUNOZAún no hay calificaciones
- Tema 1. Estatica de La ParticulaDocumento3 páginasTema 1. Estatica de La ParticulaJazz MinAún no hay calificaciones
- Informe #1, Mecanica 2Documento7 páginasInforme #1, Mecanica 2Daniela CorreaAún no hay calificaciones
- Indice - Docxtrabajo Final Fisica DianmicaDocumento53 páginasIndice - Docxtrabajo Final Fisica DianmicaEvelyn AymeAún no hay calificaciones
- Centroide MonografiaDocumento22 páginasCentroide MonografiaLlirt MillaAún no hay calificaciones
- Cantidad de Movimiento LinealDocumento4 páginasCantidad de Movimiento LinealReyes Tabasca FeblesAún no hay calificaciones
- Choques BidimensionalesDocumento14 páginasChoques BidimensionalesluisselacomeenteritaAún no hay calificaciones
- Cálculo de Trabajo Con Ayuda de La Integral DefinidaDocumento11 páginasCálculo de Trabajo Con Ayuda de La Integral DefinidaMarco ColladoAún no hay calificaciones
- CAPÍTULO 01 H0355-2014-2 IntranetDocumento31 páginasCAPÍTULO 01 H0355-2014-2 IntranetManuel SaavedraAún no hay calificaciones
- Lab1Documento10 páginasLab1Daniel FVAún no hay calificaciones
- Laboratorio 7 Segunda Ley de NewtonDocumento8 páginasLaboratorio 7 Segunda Ley de NewtonAna Maria ReinaAún no hay calificaciones
- CentroidesDocumento9 páginasCentroidesElkin Andres NavarroAún no hay calificaciones
- Informe 7 FinalDocumento6 páginasInforme 7 FinalXx android1999 xXAún no hay calificaciones
- Trabajo Pràctico - 2023 - MecanicaDocumento14 páginasTrabajo Pràctico - 2023 - Mecanicam.acostapessoaAún no hay calificaciones
- Laboratorio Centro MasaDocumento6 páginasLaboratorio Centro MasaOscar Javier ReyAún no hay calificaciones
- CyT MONOGRAFIA DE LA ESTATICADocumento5 páginasCyT MONOGRAFIA DE LA ESTATICANilfredo Marquina AyalaAún no hay calificaciones
- Resumenes de FísicaDocumento9 páginasResumenes de FísicaCarlos AndresAún no hay calificaciones
- Dinámica de Partículas - ML 02Documento9 páginasDinámica de Partículas - ML 02Orlando ServiánAún no hay calificaciones
- Fuerzas DistribuidasDocumento13 páginasFuerzas DistribuidasSaray MéndezAún no hay calificaciones
- Aceleración y Fuerza CentrípetaDocumento7 páginasAceleración y Fuerza CentrípetaAriel Alejandra MugiwaraAún no hay calificaciones
- Introducción A La Mecánica VectorialDocumento7 páginasIntroducción A La Mecánica VectorialYolverthAún no hay calificaciones
- Practica No.1 - SarayGranados-SantaigoNemeDocumento2 páginasPractica No.1 - SarayGranados-SantaigoNemeKAROL DANIELA BELTRAN ULLOAAún no hay calificaciones
- Laboratorio 3Documento12 páginasLaboratorio 3api-376260350% (4)
- Centro de MasaDocumento9 páginasCentro de MasaMolina No Se RindeAún no hay calificaciones
- CuplaDocumento44 páginasCuplaDanitza Trelles LopezAún no hay calificaciones
- S 1,2 Estatica 2021-IiDocumento9 páginasS 1,2 Estatica 2021-IiLEYLA DEL ROSARIO REYES LOZANOAún no hay calificaciones
- 3f1B AGUILAR QUINTANA ALEXIS EUSEBIODocumento56 páginas3f1B AGUILAR QUINTANA ALEXIS EUSEBIOAlexis AguilarAún no hay calificaciones
- Estática - Sesión1 Introduccion - AsdDocumento11 páginasEstática - Sesión1 Introduccion - AsdEduardobastoAún no hay calificaciones
- 2da Física de EroDocumento15 páginas2da Física de ErocarmeloAún no hay calificaciones
- Trabajo Recuperativo Fisica Beta 1Documento20 páginasTrabajo Recuperativo Fisica Beta 1Joel TabareAún no hay calificaciones
- Practica 5Documento7 páginasPractica 5SpawnDawnAún no hay calificaciones
- Cuerpos Rígidos Trabajo de EstaticaDocumento10 páginasCuerpos Rígidos Trabajo de EstaticaJoel CernaAún no hay calificaciones
- Informe Sobre FisicaDocumento21 páginasInforme Sobre FisicaAgustín OlmedoAún no hay calificaciones
- Fuerza y Su ClasificacionDocumento3 páginasFuerza y Su ClasificacionVanessaAún no hay calificaciones
- Dina MicaDocumento20 páginasDina MicasonsolesAún no hay calificaciones
- Taller 1.Documento12 páginasTaller 1.ANGELY CATALINA URIZA RAMIREZAún no hay calificaciones
- ESTATICADocumento3 páginasESTATICAmiguelAún no hay calificaciones
- Resumen Dinamica Unidad 2Documento8 páginasResumen Dinamica Unidad 2Juan Carlos Jimenez RodriguesAún no hay calificaciones
- Aplicacion A La Fisica Del Centro de Masa y Centroide (Matematica Ii) FinalDocumento33 páginasAplicacion A La Fisica Del Centro de Masa y Centroide (Matematica Ii) FinalLuis Castillo QuispeAún no hay calificaciones
- Trabajo Mecanica General 2 Dinamica FDocumento13 páginasTrabajo Mecanica General 2 Dinamica FKatherine Loredana Espinoza SáezAún no hay calificaciones
- Guia N07 Segunda Ley de NewtonDocumento14 páginasGuia N07 Segunda Ley de NewtonFrank Jr Sangay CorralesAún no hay calificaciones
- Conservacion de La Cantidad de MovimientoDocumento7 páginasConservacion de La Cantidad de MovimientoAntonioLujan0% (1)
- Fisica Aplicada A La TecnologiaDocumento39 páginasFisica Aplicada A La TecnologiaJOSE HINOJOSAAún no hay calificaciones
- Modulo de Fisica I - Generalidades Magnitudes y ConversionesDocumento18 páginasModulo de Fisica I - Generalidades Magnitudes y ConversionesCARLOS JOOAún no hay calificaciones
- Centroide MonografiaDocumento21 páginasCentroide MonografiaLlirt MillaAún no hay calificaciones
- F1 (2021) U7 FerreyraDocumento36 páginasF1 (2021) U7 FerreyraAgustin VargasAún no hay calificaciones
- AM2 2S2 2022 Clase1Documento14 páginasAM2 2S2 2022 Clase1Agustin VargasAún no hay calificaciones
- Clase 6 - Mét. Momentos 21-04-22Documento4 páginasClase 6 - Mét. Momentos 21-04-22Agustin VargasAún no hay calificaciones
- 1 FuncionesDocumento89 páginas1 FuncionesAgustin VargasAún no hay calificaciones
- 2 - Derivadas Parciales - Diferenciales y Plano TangenteDocumento59 páginas2 - Derivadas Parciales - Diferenciales y Plano TangenteAgustin VargasAún no hay calificaciones
- 6 - Maximos y Minimos CondicionadosDocumento18 páginas6 - Maximos y Minimos CondicionadosAgustin VargasAún no hay calificaciones
- 5 - Taylor y Extremos RelativosDocumento39 páginas5 - Taylor y Extremos RelativosAgustin VargasAún no hay calificaciones
- 3 - Derivadas Compuestas e ImplicitasDocumento25 páginas3 - Derivadas Compuestas e ImplicitasAgustin VargasAún no hay calificaciones
- 4 - Derivada DireccionalDocumento34 páginas4 - Derivada DireccionalAgustin VargasAún no hay calificaciones
- Taller 1 - Convertidor de ParDocumento11 páginasTaller 1 - Convertidor de ParJonathan Smith Santos RiveraAún no hay calificaciones
- Autocad Aplicado A Mineria SubterraneaDocumento2 páginasAutocad Aplicado A Mineria SubterraneaJair NizamaAún no hay calificaciones
- Plasma Gelificado: Técnica de Obtención. (Plasma Gel) .: Dermatología EstéticaDocumento5 páginasPlasma Gelificado: Técnica de Obtención. (Plasma Gel) .: Dermatología EstéticaLiliana SilvaAún no hay calificaciones
- 01.-Fisica 1 Anual 1 2010Documento10 páginas01.-Fisica 1 Anual 1 2010pepe duduAún no hay calificaciones
- Principales Elementos y Minerales en México ORODocumento33 páginasPrincipales Elementos y Minerales en México ORODipal DompalAún no hay calificaciones
- Practica 4Documento15 páginasPractica 4Alan Vázquez GonzálezAún no hay calificaciones
- Aplicación Del Método de Elementos Finitos A Una Barra Conductora de CalorDocumento22 páginasAplicación Del Método de Elementos Finitos A Una Barra Conductora de Calorfernandoalex16Aún no hay calificaciones
- Mapa de Cuencas Central Hidroelectrica HuallpachacaDocumento1 páginaMapa de Cuencas Central Hidroelectrica Huallpachacaangelo yporraAún no hay calificaciones
- Examen de ConocimientosDocumento7 páginasExamen de ConocimientosYair EncisoAún no hay calificaciones
- Ortesis y ProtesisDocumento11 páginasOrtesis y ProtesisfranAún no hay calificaciones
- Criterios de Seleccion de Equipos de CarguíoDocumento13 páginasCriterios de Seleccion de Equipos de CarguíoJeffryCallupeReáteguiAún no hay calificaciones
- Solución Guía Didáctica - Química La Tabla Periódica y Sus Propiedades PDFDocumento11 páginasSolución Guía Didáctica - Química La Tabla Periódica y Sus Propiedades PDFYuli Paola Bedoya VásquezAún no hay calificaciones
- Sugerencias Generales para El Diseño Del Controlador PIDDocumento35 páginasSugerencias Generales para El Diseño Del Controlador PIDgeoswaldAún no hay calificaciones
- Problemas Cap 7, 8 y 9Documento17 páginasProblemas Cap 7, 8 y 9Diego PomaAún no hay calificaciones
- Amplificador Optico SemiconducorDocumento8 páginasAmplificador Optico SemiconducorBruno Abello HurtadoAún no hay calificaciones
- Informe Diagrama de Hierro CarbonoDocumento11 páginasInforme Diagrama de Hierro CarbonoJesus Gabriel Sanchez PaezAún no hay calificaciones
- Q 8 ProfesionalDocumento28 páginasQ 8 Profesionalmarta agAún no hay calificaciones
- Libro de Trabajo Pensamiento Matematico IiiDocumento63 páginasLibro de Trabajo Pensamiento Matematico IiilazarodelasierrariveraAún no hay calificaciones
- 2 - Calor Sensible y LatenteDocumento30 páginas2 - Calor Sensible y LatenteEmilia MedinaAún no hay calificaciones
- Clase 2 Eco Acua 2022Documento47 páginasClase 2 Eco Acua 2022vanegrin1667Aún no hay calificaciones
- Lab 01 Acondicionamiento de SeñalDocumento27 páginasLab 01 Acondicionamiento de Señalluis LizarasoAún no hay calificaciones
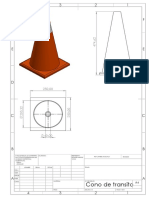
- Plano Cono de TransitoDocumento1 páginaPlano Cono de TransitoBryan José Reales AlvarezAún no hay calificaciones
- Sopa de LetrasDocumento2 páginasSopa de LetrasFrancisco Feregrino100% (1)
- Inv PlantaDocumento6 páginasInv PlantaSergio Sosa100% (1)
- Cera Limpiamuebles Pride SprayDocumento2 páginasCera Limpiamuebles Pride SprayMark DíazAún no hay calificaciones