También podría gustarte
- Esfuerzos en Vigas PDFDocumento27 páginasEsfuerzos en Vigas PDFzayda ccencho alanyaAún no hay calificaciones
- Envio 4 2021Documento6 páginasEnvio 4 2021KIESER DE LA PEÑA GASPARAún no hay calificaciones
- Libro Quiriguá Matemática 2º SemDocumento318 páginasLibro Quiriguá Matemática 2º SemIGER libros86% (7)
- Orientación 2Documento24 páginasOrientación 2SaurumBlackAún no hay calificaciones
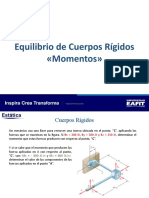
- Estática Presentación 4 Momentos3DDocumento31 páginasEstática Presentación 4 Momentos3DKaren MaldonadoAún no hay calificaciones
- Algebra Vectorial 1.1Documento8 páginasAlgebra Vectorial 1.1JOSE ANTONIO BARRON TUMBAYAún no hay calificaciones
- Orientación y RotaciónDocumento6 páginasOrientación y RotaciónAnonymous VtOVs5Aún no hay calificaciones
- 08 MB Ing Circunferencia ElipseDocumento17 páginas08 MB Ing Circunferencia ElipseRuth SolorzanoAún no hay calificaciones
- Integrales MúltiplesDocumento5 páginasIntegrales MúltiplesJorge José Querales GómezAún no hay calificaciones
- Flexión PuraDocumento36 páginasFlexión Puraherber ramosAún no hay calificaciones
- Clase Unidad 3 Cinematica Del Rígido Clase 2 2021 PDFDocumento17 páginasClase Unidad 3 Cinematica Del Rígido Clase 2 2021 PDFGerL VargasAún no hay calificaciones
- Repaso - 4Documento5 páginasRepaso - 4Carlos A. PinzónAún no hay calificaciones
- ElipseDocumento18 páginasElipsewecejot855Aún no hay calificaciones
- Analisis Vectorial BDocumento23 páginasAnalisis Vectorial BmwueaqpAún no hay calificaciones
- FU-02 PPT VectoresDocumento37 páginasFU-02 PPT Vectoresmily Riva AgueroAún no hay calificaciones
- Analisis VectorialDocumento15 páginasAnalisis Vectorialsol estefani picon inquiltupaAún no hay calificaciones
- Producto Vectorial o Producto CruzDocumento11 páginasProducto Vectorial o Producto CruzYoverlys TaboadaAún no hay calificaciones
- Lección 9-1Documento22 páginasLección 9-1Emanuel Santa Cruz CasianoAún no hay calificaciones
- Geometría Analítica N°12Documento14 páginasGeometría Analítica N°12Valeria TaparaAún no hay calificaciones
- AMIII - Pizarra 2 - 2022-1Documento10 páginasAMIII - Pizarra 2 - 2022-1Adriana Valdivia PalaciosAún no hay calificaciones
- 18 - Teorema de Stokes - AlumDocumento9 páginas18 - Teorema de Stokes - AlumValenAún no hay calificaciones
- 2022 - 03 - 09 - Fórmulas de Aplicación Matemática DiDocumento12 páginas2022 - 03 - 09 - Fórmulas de Aplicación Matemática DiAgus MontenegroAún no hay calificaciones
- Sistema de Coordenada Rectangular en El EspacioDocumento26 páginasSistema de Coordenada Rectangular en El EspacioValentin ValeraAún no hay calificaciones
- MomentoAngular PDFDocumento22 páginasMomentoAngular PDFSilviaNiñoAún no hay calificaciones
- Clase 5Documento31 páginasClase 5JHONATAN ALEXANDER ROSALES PORTILLAAún no hay calificaciones
- 100-MCD - Deformación en VigasDocumento99 páginas100-MCD - Deformación en VigasLenov DAún no hay calificaciones
- AULA 3 - 9 de Agosto de 2022Documento19 páginasAULA 3 - 9 de Agosto de 2022Carolina Choque MamaniAún no hay calificaciones
- T0 Vect CinDocumento16 páginasT0 Vect CinJuanLoredoAún no hay calificaciones
- Vibración Libre PDFDocumento31 páginasVibración Libre PDFandy zumbaAún no hay calificaciones
- Matemática 1 - ResumenDocumento30 páginasMatemática 1 - ResumenDulce AlvarengaAún no hay calificaciones
- Clase 14-01Documento13 páginasClase 14-01Segundo Carlos Moreira MeraAún no hay calificaciones
- CLASE 1 Vectores en R3, Geometría Analítica Espacial V1.Documento9 páginasCLASE 1 Vectores en R3, Geometría Analítica Espacial V1.Santiago Leonardo Marcillo HidalgoAún no hay calificaciones
- Semana 4Documento10 páginasSemana 4Price Sanchez JoseAún no hay calificaciones
- 02 Vectores Fis1 FQIQ 2022-IIDocumento32 páginas02 Vectores Fis1 FQIQ 2022-IIBoris BoinaAún no hay calificaciones
- Grupo 02 - Esfuerzo Cortante Por Flexión - Resistencia de Materiales IDocumento58 páginasGrupo 02 - Esfuerzo Cortante Por Flexión - Resistencia de Materiales IAlex Fernando CerCanAún no hay calificaciones
- Tp12 Grafica Funciones TrigonometricasDocumento4 páginasTp12 Grafica Funciones Trigonometricasliliana parraAún no hay calificaciones
- Unidad I - Funciones VectorialesDocumento36 páginasUnidad I - Funciones VectorialesAlexander Peña AlvaradoAún no hay calificaciones
- S09.s03 - Esfuerzo FlexionanteDocumento21 páginasS09.s03 - Esfuerzo FlexionanteRonny Cervantes RojasAún no hay calificaciones
- Segundo Momento de Inercia: Figuras Simples Y CompuestasDocumento26 páginasSegundo Momento de Inercia: Figuras Simples Y CompuestasAlexis Cayle CasasAún no hay calificaciones
- FORMULARIO GA Agosto23Documento10 páginasFORMULARIO GA Agosto23gabs101007Aún no hay calificaciones
- SIISyG2017 - Mg. César Espezua Llerena - Analisis de Edificios Con La Tecnica Del Medio ContinuoDocumento32 páginasSIISyG2017 - Mg. César Espezua Llerena - Analisis de Edificios Con La Tecnica Del Medio ContinuoHiden Jaime Machaca HuancolloAún no hay calificaciones
- 04 Seccion 4 GreenDocumento17 páginas04 Seccion 4 GreenCarlosAún no hay calificaciones
- ParábolaDocumento19 páginasParábolawecejot855Aún no hay calificaciones
- F1 - S02 - PPT - Analisis VectorialDocumento25 páginasF1 - S02 - PPT - Analisis VectorialFlor vAún no hay calificaciones
- Modelo Atomico Actual-Numeros Cuanticos-Terminos Espectroscopicos.Documento59 páginasModelo Atomico Actual-Numeros Cuanticos-Terminos Espectroscopicos.Augusto Muñoz VillarrealAún no hay calificaciones
- 6-Trabajo y EnergíaDocumento16 páginas6-Trabajo y EnergíaJossa Fabri HuallAún no hay calificaciones
- Teoria Analisi Matricial OkDocumento21 páginasTeoria Analisi Matricial OkJoel PérezAún no hay calificaciones
- 14 - Integrales de Línea - AlumDocumento7 páginas14 - Integrales de Línea - AlumValenAún no hay calificaciones
- Transformaciones MatricialesDocumento18 páginasTransformaciones MatricialesHarold VieraAún no hay calificaciones
- Teorema Del Seno y Teorema Del CosenoDocumento16 páginasTeorema Del Seno y Teorema Del CosenoMatiasAún no hay calificaciones
- Clase 1Documento5 páginasClase 1JOSE GANDICAAún no hay calificaciones
- Clase - Momentos de InerciaDocumento44 páginasClase - Momentos de Inercianataly ibarra choqueAún no hay calificaciones
- Cinemática InversaDocumento37 páginasCinemática InversaFranklin BravoAún no hay calificaciones
- T0 Vectores CinematicaDocumento11 páginasT0 Vectores CinematicarakelarausAún no hay calificaciones
- Geometría Analítica N°13Documento22 páginasGeometría Analítica N°13Valeria TaparaAún no hay calificaciones
- Curvas de PersecucionDocumento8 páginasCurvas de PersecucionEdward CáceresAún no hay calificaciones
- Clase 2Documento8 páginasClase 2pampelusi2Aún no hay calificaciones
- SensoresDocumento47 páginasSensoresJhon undaAún no hay calificaciones
- Introducción A La RobóticaDocumento34 páginasIntroducción A La RobóticaJhon undaAún no hay calificaciones
- Tema 1 Operaciones Enteros DivisibilidadDocumento25 páginasTema 1 Operaciones Enteros DivisibilidadJhon undaAún no hay calificaciones
- Conceptos Básicos de La RobóticaDocumento35 páginasConceptos Básicos de La RobóticaJhon undaAún no hay calificaciones
- Posición de Un Sólido RígidoDocumento14 páginasPosición de Un Sólido RígidoJhon undaAún no hay calificaciones
- Diseño y Evaluación de Proyectos Ac 1Documento1 páginaDiseño y Evaluación de Proyectos Ac 1Jhon undaAún no hay calificaciones
- Diseño y Evaluación de Proyectos Ac 2Documento50 páginasDiseño y Evaluación de Proyectos Ac 2Jhon undaAún no hay calificaciones
- Orientación de Un Cuerpo RígidoDocumento31 páginasOrientación de Un Cuerpo RígidoJhon undaAún no hay calificaciones
- Introducción de ROSDocumento21 páginasIntroducción de ROSJhon undaAún no hay calificaciones
- Rotulado FormatoDocumento15 páginasRotulado FormatoFranklin BravoAún no hay calificaciones
- Tutorial SolidWorksDocumento11 páginasTutorial SolidWorksJhon undaAún no hay calificaciones
- Proyecto de Christian Ojeda 1Documento14 páginasProyecto de Christian Ojeda 1Christian Vinicio Ojeda AraujoAún no hay calificaciones
- Sistema de Ecuaciones Lineales Con Dos Incg PDFDocumento10 páginasSistema de Ecuaciones Lineales Con Dos Incg PDFosalamanca0Aún no hay calificaciones
- SEMANA 1 - SESION 1 y 2 - Escalares y VectoresDocumento25 páginasSEMANA 1 - SESION 1 y 2 - Escalares y VectoresFelipeAún no hay calificaciones
- Práctica 0Documento19 páginasPráctica 0safarioreAún no hay calificaciones
- Cristerios de KumonDocumento12 páginasCristerios de KumonGerman BarretoAún no hay calificaciones
- Sílabo Estructuras Algebraicas II (Sem 2020-I)Documento7 páginasSílabo Estructuras Algebraicas II (Sem 2020-I)Fox JoshuaAún no hay calificaciones
- ESO 3 T03 II Potencias y Raíces ResumenDocumento2 páginasESO 3 T03 II Potencias y Raíces ResumenElisa MartinezAún no hay calificaciones
- 540 Tarea2Documento27 páginas540 Tarea2Jesus Steban Montaña SanzAún no hay calificaciones
- Qué Son Números NaturalesDocumento1 páginaQué Son Números NaturalesJose Camilo Eraso GuerreroAún no hay calificaciones
- Guías de Aprendizaje Matematicas NovenoDocumento3 páginasGuías de Aprendizaje Matematicas NovenoMarlon Galviz VillaAún no hay calificaciones
- Descomposición LUDocumento37 páginasDescomposición LUbenedicto maximo requez sanchez0% (1)
- Ejercicio de Derivada DireccionalDocumento3 páginasEjercicio de Derivada DireccionalDaironDoradoCastilloAún no hay calificaciones
- Fase 4 Aplicaciones de Los Sistemas MatricialesDocumento5 páginasFase 4 Aplicaciones de Los Sistemas MatricialesSamuel RojasAún no hay calificaciones
- Parcial 2 02-17Documento4 páginasParcial 2 02-17FranciscoJavierAlvarezAún no hay calificaciones
- Tecnicas IntegraciónDocumento27 páginasTecnicas IntegraciónXavier VelasquezAún no hay calificaciones
- Angel Oviedo Castillo Act Sem6Documento6 páginasAngel Oviedo Castillo Act Sem6Teresa OviedoAún no hay calificaciones
- Guia #5 Matemáticas 9°Documento13 páginasGuia #5 Matemáticas 9°Margarita Cárdenas RuizAún no hay calificaciones
- Mcdi U2 A2Documento12 páginasMcdi U2 A2Abelardo ElizondoAún no hay calificaciones
- Taller 1Documento6 páginasTaller 1Kelvin Parco FelicesAún no hay calificaciones
- Guias de Clase 3er AñoDocumento25 páginasGuias de Clase 3er AñoArianny EstevesAún no hay calificaciones
- Geometria ProyectivaDocumento10 páginasGeometria ProyectivaalanAún no hay calificaciones
- Covimatic SecundariaDocumento129 páginasCovimatic SecundariaHelberAbantoCotrinaAún no hay calificaciones
- aCTIVIDAD 1 AlgebraDocumento7 páginasaCTIVIDAD 1 AlgebraRita RosaAún no hay calificaciones
- MATEMATICA Pauta Retroalimentacion 1 Basico BDocumento11 páginasMATEMATICA Pauta Retroalimentacion 1 Basico BLorena Mardones RiquelmeAún no hay calificaciones
- Tabla de Integrales F3Documento2 páginasTabla de Integrales F3camimedAún no hay calificaciones
- Apaico Verano s6Documento17 páginasApaico Verano s6edisonmiguel4Aún no hay calificaciones
- Guía de 1°año - 2024Documento76 páginasGuía de 1°año - 2024lorenley17Aún no hay calificaciones
- Logaritmacion, Potenciacion y RadicacionDocumento7 páginasLogaritmacion, Potenciacion y RadicacionLuz AngelaAún no hay calificaciones
- Actividad Evaluativa Eje 2 Act - GrupalDocumento21 páginasActividad Evaluativa Eje 2 Act - GrupalLuis Mora VelaAún no hay calificaciones