También podría gustarte
- Pae Tec Leve - ModeradoDocumento36 páginasPae Tec Leve - ModeradoLeddy Rebaza80% (5)
- Bienes - Hernan CorralDocumento635 páginasBienes - Hernan CorralBelen Ojeda Aburto50% (2)
- Cabrerazit Karina M12s1ai1Documento6 páginasCabrerazit Karina M12s1ai1Kari ZitAún no hay calificaciones
- Tarea01 Dinámica EstructuralDocumento13 páginasTarea01 Dinámica EstructuralJOHAN NOVICH QUISPE SULLCA100% (1)
- Consultoría Organizacional (Digitalizado)Documento163 páginasConsultoría Organizacional (Digitalizado)Lucía Prieto Perez100% (2)
- La ecuación general de segundo grado en dos y tres variablesDe EverandLa ecuación general de segundo grado en dos y tres variablesAún no hay calificaciones
- Clase08a 365502 Downloable 2237517Documento9 páginasClase08a 365502 Downloable 2237517Jhan FernandezAún no hay calificaciones
- Analisis Matricial PDFDocumento115 páginasAnalisis Matricial PDFWladimir Diego Curasma100% (2)
- Modelado de Sistemas MecanicosDocumento21 páginasModelado de Sistemas MecanicosAvril Juas juasAún no hay calificaciones
- Guia de Lectura Los Mejores Relatos EspanolesDocumento15 páginasGuia de Lectura Los Mejores Relatos Espanolesguipere100% (1)
- Compendio Ejercicios Trabajo y EnergíaDocumento51 páginasCompendio Ejercicios Trabajo y EnergíaRobertRamosVillegasAún no hay calificaciones
- Guia Practica para Semilleros y JuvenilesDocumento33 páginasGuia Practica para Semilleros y JuvenilesALBERTOAún no hay calificaciones
- Procedimiento de Investigacion de Incidentes y AccidentesDocumento7 páginasProcedimiento de Investigacion de Incidentes y AccidentesSandra Arevalo Garrido100% (1)
- Herramientas de Gestión de Seguridad PETARDocumento15 páginasHerramientas de Gestión de Seguridad PETARJuan Carlos Sarmiento MuñozAún no hay calificaciones
- Taller 3. Ley de CoulombDocumento8 páginasTaller 3. Ley de Coulomb1971karlosAún no hay calificaciones
- Delimitacion Del TemaDocumento12 páginasDelimitacion Del TemaCynthia RodrìguezAún no hay calificaciones
- Taller 4. Campo EléctricoDocumento8 páginasTaller 4. Campo Eléctrico1971karlos50% (2)
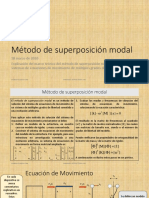
- Método de Superposición ModalDocumento37 páginasMétodo de Superposición ModalSANTIAGO TORRESAún no hay calificaciones
- Fii (Semana 1)Documento20 páginasFii (Semana 1)Raul ArmasAún no hay calificaciones
- Ejemplo Combinaci NmodalDocumento11 páginasEjemplo Combinaci NmodalDavid Matias Valverde RojasAún no hay calificaciones
- Ejerc1 EnergDocumento14 páginasEjerc1 EnergAlvaro Nina PintoAún no hay calificaciones
- T3 Est SolDocumento14 páginasT3 Est SolCamlo Nds BarbsaAún no hay calificaciones
- Tema 1 Interaccion Electrica Febrero 2021Documento48 páginasTema 1 Interaccion Electrica Febrero 2021Jhoel FloresAún no hay calificaciones
- Sistem As Line A LesDocumento6 páginasSistem As Line A Lesfer villamorAún no hay calificaciones
- Resolucion Portico MathcadDocumento2 páginasResolucion Portico MathcadMarkito QuindeAún no hay calificaciones
- CadenaBi AtomicaDocumento2 páginasCadenaBi AtomicaAldair InchimaAún no hay calificaciones
- Preinforme CalificadoDocumento6 páginasPreinforme CalificadoRafael Rubio NuñezAún no hay calificaciones
- Pdfslide - Tips Fisca 561c39d677fdbDocumento16 páginasPdfslide - Tips Fisca 561c39d677fdbDemanledd OrtizAún no hay calificaciones
- Fisicas Mecanica Guia 2-11111Documento3 páginasFisicas Mecanica Guia 2-11111CAMILAAún no hay calificaciones
- Ejercicio de Un Robot RRDocumento4 páginasEjercicio de Un Robot RRDiana UlloaAún no hay calificaciones
- Martínez Alaniz Sinuhe M12S2AI3Documento4 páginasMartínez Alaniz Sinuhe M12S2AI3MITHOS ORNAGELAAún no hay calificaciones
- Taller Fisica IiDocumento11 páginasTaller Fisica IiOrlando Piedrahita GonzalezAún no hay calificaciones
- Deber e FinitosDocumento5 páginasDeber e FinitosWillian PullopaxiAún no hay calificaciones
- Ley de CoulumbDocumento15 páginasLey de CoulumbBraham Gonzales ZuloetaAún no hay calificaciones
- Clase 1 - Carga Electrica y Ley de CoulombDocumento34 páginasClase 1 - Carga Electrica y Ley de CoulombChristopher González TañónAún no hay calificaciones
- Problemas de ControlDocumento43 páginasProblemas de ControlLuigi PortugalAún no hay calificaciones
- Planteo de Sistema de Variables de Estado de Un Sistema MecánicoDocumento3 páginasPlanteo de Sistema de Variables de Estado de Un Sistema MecánicoLucas DanielAún no hay calificaciones
- Solo Falta El ScincecapeDocumento4 páginasSolo Falta El ScincecapeRoger EscalanteAún no hay calificaciones
- Ejercicios Columb Campo 21 2Documento14 páginasEjercicios Columb Campo 21 2JULIAN CAMILO RIVEROS FONSECAAún no hay calificaciones
- Algebra AlgCBC Prac 4 EspVect18 Ejerc08al09Documento2 páginasAlgebra AlgCBC Prac 4 EspVect18 Ejerc08al09Juan Alberto MicheaAún no hay calificaciones
- Solucion Sistema MecanicoDocumento10 páginasSolucion Sistema Mecanicoandres becerraAún no hay calificaciones
- 20200319182824Documento31 páginas20200319182824Johanny GarcesAún no hay calificaciones
- Hardy CroosDocumento4 páginasHardy Croosmisael victorianoAún no hay calificaciones
- Vibraciones Mecánicas CRD7 W 2 - 2Documento16 páginasVibraciones Mecánicas CRD7 W 2 - 2Dariel GomezAún no hay calificaciones
- Descomposición Modal para Sismos Y Análisis EspectralDocumento11 páginasDescomposición Modal para Sismos Y Análisis EspectralNick SulcaAún no hay calificaciones
- Tema4 - Pendulo, Areas-17-23Documento7 páginasTema4 - Pendulo, Areas-17-23Luis Alexander Niiño FlorezAún no hay calificaciones
- ER01 - Dinámica y Acción Sísmica-Ejercicio 3Documento8 páginasER01 - Dinámica y Acción Sísmica-Ejercicio 3Soul25251Aún no hay calificaciones
- Problemas de ControlDocumento44 páginasProblemas de ControlLuigi Portugal0% (2)
- MS46 Ma462 L03 MuñozDocumento2 páginasMS46 Ma462 L03 MuñozMuñoz Malca Michael AlfredoAún no hay calificaciones
- Impedancia Mecanica PDFDocumento6 páginasImpedancia Mecanica PDFDimber CáceresAún no hay calificaciones
- Salazar Medina - Tarea 1 - Aplicaciones Reales de La Transformada de LaplaceDocumento10 páginasSalazar Medina - Tarea 1 - Aplicaciones Reales de La Transformada de LaplaceAngieCarOlinaSalazarMedinaAún no hay calificaciones
- Actividad Prática Individual #02 - CÁLCULO MOMENTO DE INERCIA.Documento13 páginasActividad Prática Individual #02 - CÁLCULO MOMENTO DE INERCIA.Kiara Oyarce y Mirian AguilarAún no hay calificaciones
- 4.2. Material Complementario 2. Otro Ejercicio ResueltoDocumento2 páginas4.2. Material Complementario 2. Otro Ejercicio ResueltoalexiaclcAún no hay calificaciones
- 6,14y 15 (Costos y Producción) AlonsoDocumento7 páginas6,14y 15 (Costos y Producción) AlonsoAlonso CuevaAún no hay calificaciones
- Campo Electrico y PotencialDocumento43 páginasCampo Electrico y PotencialLuis PLAún no hay calificaciones
- FeriaDominguez Mariana M12S2AI3Documento6 páginasFeriaDominguez Mariana M12S2AI3lizeth zamora0% (1)
- 63 (Cruzito)Documento2 páginas63 (Cruzito)Javier Zambrana ArriagaAún no hay calificaciones
- CastilloGallegos Quitzia M12S1AI1Documento4 páginasCastilloGallegos Quitzia M12S1AI1Alejandra Castillo100% (1)
- Traccion en Elementos Finitos (MATLAB)Documento15 páginasTraccion en Elementos Finitos (MATLAB)christian cruz mozoAún no hay calificaciones
- Electricidad y Electromagnetismo Trabajo de RecuperacionDocumento5 páginasElectricidad y Electromagnetismo Trabajo de RecuperacionDani Ortegon BejaranoAún no hay calificaciones
- FIsica Mecanica Guia 2Documento27 páginasFIsica Mecanica Guia 2CAMILAAún no hay calificaciones
- Integrales de Funciones Trigonométricas PDFDocumento3 páginasIntegrales de Funciones Trigonométricas PDFDario QTurpoAún no hay calificaciones
- Carga Electrica y Campo Electrico Clase 2Documento33 páginasCarga Electrica y Campo Electrico Clase 2Andres HernandezAún no hay calificaciones
- Analisis Estructural S-11 - Metodo de Las Rigideces MarcosDocumento13 páginasAnalisis Estructural S-11 - Metodo de Las Rigideces MarcosMora JoseAún no hay calificaciones
- Formulario I3 - ExamenDocumento2 páginasFormulario I3 - Examenamin alabiAún no hay calificaciones
- Informe Practica 6 (Guion M3)Documento11 páginasInforme Practica 6 (Guion M3)marcos requenaAún no hay calificaciones
- Etapa 2 Obtener Los Modelos Matemáticos de Sistemas Físicos en ElDocumento6 páginasEtapa 2 Obtener Los Modelos Matemáticos de Sistemas Físicos en ElomarmonrroyAún no hay calificaciones
- Proceso Enfermeria Parte 2 PDFDocumento8 páginasProceso Enfermeria Parte 2 PDFRenalia Escobar Alvares100% (1)
- Iso 9001Documento2 páginasIso 9001YENNY CORREA LÓPEZ100% (1)
- II. Diagnóstico de EVC Agudo e ImitadoresDocumento20 páginasII. Diagnóstico de EVC Agudo e ImitadoresFanny Rubí Vargas ZamarripaAún no hay calificaciones
- Fundición de CobreDocumento5 páginasFundición de CobreDaniel ApazaAún no hay calificaciones
- Creación de Problemas Sobre Algoritmo de La DivisiónDocumento9 páginasCreación de Problemas Sobre Algoritmo de La Divisiónivis791Aún no hay calificaciones
- Ec0217 01Documento20 páginasEc0217 01Jose Daniel Hernandez100% (1)
- Evidencia 2 Actividad No. 23Documento10 páginasEvidencia 2 Actividad No. 23Jose Luis Gonzalez100% (3)
- AAC 120 mm2Documento2 páginasAAC 120 mm2DanielAún no hay calificaciones
- TransformadoresDocumento12 páginasTransformadoresNavarro FredyAún no hay calificaciones
- Cuadernillo 8 Feb 2Documento26 páginasCuadernillo 8 Feb 2Cesar MendozaAún no hay calificaciones
- PANCREASDocumento41 páginasPANCREASPepe Bueno100% (1)
- NotificacionRezagosPO - 800183221 - 2054 COLFONDOSDocumento3 páginasNotificacionRezagosPO - 800183221 - 2054 COLFONDOSRicardo Libranza100% (1)
- Actividad 16 Evidencia 2 Matriz de RiesgosDocumento22 páginasActividad 16 Evidencia 2 Matriz de RiesgosNelson PrinsAún no hay calificaciones
- Manual Fraseologia COLOMBIA 2020Documento126 páginasManual Fraseologia COLOMBIA 2020Gustavo PinedaAún no hay calificaciones
- Eai SoaDocumento10 páginasEai SoaPaula Andrea Gomes BuitragoAún no hay calificaciones
- 01 Practico Nc2ba1 PH Acidos y BasesDocumento2 páginas01 Practico Nc2ba1 PH Acidos y Basesbiologia1713Aún no hay calificaciones
- Prueba Excel y AccessDocumento4 páginasPrueba Excel y AccessYeimy EspitiaAún no hay calificaciones
- PerfilesDocumento15 páginasPerfilesjuanjuvinaoAún no hay calificaciones
- Alprazolam PowerDocumento10 páginasAlprazolam PowereduardoAún no hay calificaciones
- Construcción Del Diagrama de FasesDocumento16 páginasConstrucción Del Diagrama de FasesDavid Esteban Soler CamargoAún no hay calificaciones
- Docencia, Rol e IdentidadDocumento3 páginasDocencia, Rol e IdentidadJuan Mata PimentelAún no hay calificaciones
- Cultura XincaDocumento16 páginasCultura XincaMelissa RamirezAún no hay calificaciones