100% encontró este documento útil (1 voto)
293 vistas13 páginasMotores Eléctricos: Tipos y Control
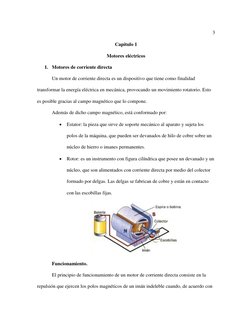
El documento resume los diferentes tipos de motores eléctricos, incluyendo motores de corriente directa y de corriente alterna. Describe la clasificación y funcionamiento básico de motores de corriente directa como serie, shunt y compuesto. También explica que los motores de corriente alterna funcionan creando un campo magnético giratorio y clasifica los motores monofásicos y trifásicos, incluyendo de bobinado auxiliar, en corto circuito y universal para monofásicos, y de rotor bobinado y en corto circuito para
Cargado por
Luis Wiwicho CmDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
100% encontró este documento útil (1 voto)
293 vistas13 páginasMotores Eléctricos: Tipos y Control
El documento resume los diferentes tipos de motores eléctricos, incluyendo motores de corriente directa y de corriente alterna. Describe la clasificación y funcionamiento básico de motores de corriente directa como serie, shunt y compuesto. También explica que los motores de corriente alterna funcionan creando un campo magnético giratorio y clasifica los motores monofásicos y trifásicos, incluyendo de bobinado auxiliar, en corto circuito y universal para monofásicos, y de rotor bobinado y en corto circuito para
Cargado por
Luis Wiwicho CmDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd