También podría gustarte
- Controllabilidad y observabilidad de sistemas de controlDocumento6 páginasControllabilidad y observabilidad de sistemas de controlJhulian VillafuerteAún no hay calificaciones
- Solución ecuación estado no homogénea SimulinkDocumento5 páginasSolución ecuación estado no homogénea SimulinkJhulian Villafuerte100% (1)
- Exp. N°8 Ubicacion de PolosDocumento3 páginasExp. N°8 Ubicacion de PolosDARWIN DARIUS USCCACHI VALENCIAAún no hay calificaciones
- INFORME7Documento5 páginasINFORME7Felipe SanchezAún no hay calificaciones
- Laboratorio N°9 SC2Documento5 páginasLaboratorio N°9 SC2Brayan VQAún no hay calificaciones
- Informe Final 1Documento5 páginasInforme Final 1Pedro Calixtro SotoAún no hay calificaciones
- Controladores CADocumento22 páginasControladores CAVictor Junco RenteraAún no hay calificaciones
- Laboratorio N°8 SC2Documento4 páginasLaboratorio N°8 SC2Brayan VQ100% (1)
- LABO9Documento7 páginasLABO9Jhulian VillafuerteAún no hay calificaciones
- LABO4Documento5 páginasLABO4Jhulian VillafuerteAún no hay calificaciones
- Informe Previo 6Documento9 páginasInforme Previo 6LuisCabreraOroscoAún no hay calificaciones
- Laboratorio N°3 SC2Documento7 páginasLaboratorio N°3 SC2Brayan VQ100% (1)
- Control2 2Documento5 páginasControl2 2Afir MinayaAún no hay calificaciones
- Informe I - UNMSM - SCII - MANDUJANODocumento12 páginasInforme I - UNMSM - SCII - MANDUJANOAmerico MedinaAún no hay calificaciones
- 1ra PRUEBA SC-1 2021-1Documento2 páginas1ra PRUEBA SC-1 2021-1Jose David YepAún no hay calificaciones
- INFORME1Documento5 páginasINFORME1Felipe SanchezAún no hay calificaciones
- Labo N°1 - Com. AnalógicaDocumento25 páginasLabo N°1 - Com. AnalógicaTakeshi Cardenas NunhezAún no hay calificaciones
- Laboratorio 5Documento7 páginasLaboratorio 5DARWIN DARIUS USCCACHI VALENCIAAún no hay calificaciones
- Informe Previo 4 MalcaDocumento5 páginasInforme Previo 4 MalcaLuisfelipe Zavaleta GuevaraAún no hay calificaciones
- Informe 1 - Ramirez Rodriguez CarloDocumento7 páginasInforme 1 - Ramirez Rodriguez Carlocarlo ramirez rodriguezAún no hay calificaciones
- Informe Previo 1 de Micro-Nano SistemasDocumento17 páginasInforme Previo 1 de Micro-Nano SistemasMatias Abrego CaceresAún no hay calificaciones
- Lab05 PdsDocumento16 páginasLab05 PdsHilario SoteloAún no hay calificaciones
- Informe Final 4 MalcaDocumento8 páginasInforme Final 4 MalcaJohn CastroAún no hay calificaciones
- Binder 2Documento31 páginasBinder 2henryvgAún no hay calificaciones
- Nicanor Raul Benites Saravia - FieeDocumento5 páginasNicanor Raul Benites Saravia - FieeWalther CJAún no hay calificaciones
- Informe Final 4Documento20 páginasInforme Final 4Brayan VQAún no hay calificaciones
- Informe Final 4 S.C 1Documento15 páginasInforme Final 4 S.C 1Zosimo Palomino HuaccamaytaAún no hay calificaciones
- Control por realimentación de estadosDocumento13 páginasControl por realimentación de estadoswalterAún no hay calificaciones
- Revision 1Documento2 páginasRevision 1Sebastian Lopez VillanuevaAún no hay calificaciones
- Informe - Grupo II - Sesión3Documento11 páginasInforme - Grupo II - Sesión3Russell Bryan Salomé ArcosAún no hay calificaciones
- Senales y Sistemas Profesor ZavalaDocumento8 páginasSenales y Sistemas Profesor ZavalaVictor TorresAún no hay calificaciones
- Informe 04 CaDocumento14 páginasInforme 04 CaJohn PalominoAún no hay calificaciones
- SonquilloDocumento12 páginasSonquilloANTHONY VALENCIA ZUTAAún no hay calificaciones
- Trabpr 6 TDocumento17 páginasTrabpr 6 TYean Guere LavadoAún no hay calificaciones
- Informe Final 4 Sistemas de ControlDocumento7 páginasInforme Final 4 Sistemas de ControlMigvel Angel Soncco XD100% (1)
- Informe Final 2Documento8 páginasInforme Final 2Alexis Cueva GAún no hay calificaciones
- INFORME PREVIO 4 - Sistemas de ControlDocumento12 páginasINFORME PREVIO 4 - Sistemas de ControlLuceroMilagrosCubaMirandaAún no hay calificaciones
- Informe Final Diseño de ContadoresDocumento16 páginasInforme Final Diseño de ContadoresAlex SevillaAún no hay calificaciones
- Practica 4 Telecomunicaciones Unac FieeDocumento8 páginasPractica 4 Telecomunicaciones Unac FieeAldair MontalvoAún no hay calificaciones
- Lab de Control - 2do Informe FinalDocumento10 páginasLab de Control - 2do Informe FinalIVAN ALONSO CCAHUACHIA LETONAAún no hay calificaciones
- Informe Previo 3 Circuitos Combinacionales - Mapas de KarnaughDocumento6 páginasInforme Previo 3 Circuitos Combinacionales - Mapas de KarnaughCesar Idvorsky Gutiérrez CachiqueAún no hay calificaciones
- Informe 1 - Muestreadores y RetenedoresDocumento15 páginasInforme 1 - Muestreadores y RetenedoresAmael Chacon RodriguezAún no hay calificaciones
- Informe 2 MalcaDocumento16 páginasInforme 2 MalcaRicardo D. Alca MejiaAún no hay calificaciones
- Lab 04 PD Ec Dif 20 IDocumento5 páginasLab 04 PD Ec Dif 20 IROSA BERNAOLAAún no hay calificaciones
- Laboratorio N°2 Micro Nano Sistemas Electronicos-Diaz Machuca DanielDocumento13 páginasLaboratorio N°2 Micro Nano Sistemas Electronicos-Diaz Machuca Danieldaniel diazAún no hay calificaciones
- Laboratorio de Enlaces ÓpticosDocumento12 páginasLaboratorio de Enlaces ÓpticosNefasto -Aún no hay calificaciones
- Informe 1 Malca Control IDocumento17 páginasInforme 1 Malca Control IJoelAnthonyOréDionisioAún no hay calificaciones
- Prac 4 CD 2019Documento8 páginasPrac 4 CD 2019brandon payano de la cruzAún no hay calificaciones
- M Comunicaciones Digitales 2021-1Documento88 páginasM Comunicaciones Digitales 2021-1ALEX5154411Aún no hay calificaciones
- Análisis de circuitos digitales y sensores de un smartphoneDocumento16 páginasAnálisis de circuitos digitales y sensores de un smartphoneBrayan VQAún no hay calificaciones
- Informe 5 Al 100% Del Laboratorio de Circuitos DigitalesDocumento19 páginasInforme 5 Al 100% Del Laboratorio de Circuitos DigitalesDavid Del ValleAún no hay calificaciones
- 1.modulaciones Analógicas PDFDocumento11 páginas1.modulaciones Analógicas PDFGodo SánchezAún no hay calificaciones
- Informe Final 2 de Sistema de Control 1Documento6 páginasInforme Final 2 de Sistema de Control 1walterAún no hay calificaciones
- Informe 7 FSKDocumento8 páginasInforme 7 FSKLeviatannlpAún no hay calificaciones
- Informe Previo 02 - Microelectronica1Documento19 páginasInforme Previo 02 - Microelectronica1Sergio MarceloAún no hay calificaciones
- Informe 2 - Sanchez LopezDocumento20 páginasInforme 2 - Sanchez LopezFelipe SanchezAún no hay calificaciones
- LABO2Documento4 páginasLABO2Jhulian VillafuerteAún no hay calificaciones
- Experiencia 3Documento8 páginasExperiencia 3Ronal HbAún no hay calificaciones
- Informe Final 3Documento5 páginasInforme Final 3Pedro Calixtro SotoAún no hay calificaciones
- Laboratorio de Sistemas de Control (Laboratorio 1 Control Manual) - O813 Coscorrosa Riveros Rondon SaezDocumento11 páginasLaboratorio de Sistemas de Control (Laboratorio 1 Control Manual) - O813 Coscorrosa Riveros Rondon SaezRicardo RondonAún no hay calificaciones
- Modulacion AM VillafuerteDocumento10 páginasModulacion AM VillafuerteJhulian VillafuerteAún no hay calificaciones
- Laboratorio3 Grupo4Documento5 páginasLaboratorio3 Grupo4Jhulian VillafuerteAún no hay calificaciones
- Examen Final Optica y Fisica ModernaDocumento4 páginasExamen Final Optica y Fisica ModernaJhulian VillafuerteAún no hay calificaciones
- Monografia VillafuerteDocumento10 páginasMonografia VillafuerteJhulian VillafuerteAún no hay calificaciones
- Modulacion AmDocumento3 páginasModulacion AmJhulian VillafuerteAún no hay calificaciones
- Silabo Optica y Fisica ModernaDocumento3 páginasSilabo Optica y Fisica ModernaStanoji Arnols Peña Zamudio100% (1)
- Examen Parcial Redes InalambricasDocumento5 páginasExamen Parcial Redes InalambricasJhulian VillafuerteAún no hay calificaciones
- Block ChainDocumento2 páginasBlock ChainJhulian VillafuerteAún no hay calificaciones
- Codigo de Etica CPPDocumento5 páginasCodigo de Etica CPPRoxana Choquecota MirandaAún no hay calificaciones
- Capitulo 5 - VillafuerteDocumento2 páginasCapitulo 5 - VillafuerteJhulian VillafuerteAún no hay calificaciones
- Elon - Musk - Informe FinalDocumento3 páginasElon - Musk - Informe FinalJhulian VillafuerteAún no hay calificaciones
- Método de La Integral Del Error Sintonía Controlador PIDDocumento7 páginasMétodo de La Integral Del Error Sintonía Controlador PIDJhulian VillafuerteAún no hay calificaciones
- Examen C. AnalogicaDocumento5 páginasExamen C. AnalogicaJhulian VillafuerteAún no hay calificaciones
- METODOLOGÍA DE LA INVESTIGACIÓN: DISEÑOS EXPERIMENTALES Y NO EXPERIMENTALESDocumento2 páginasMETODOLOGÍA DE LA INVESTIGACIÓN: DISEÑOS EXPERIMENTALES Y NO EXPERIMENTALESJhulian VillafuerteAún no hay calificaciones
- LABO9Documento7 páginasLABO9Jhulian VillafuerteAún no hay calificaciones
- METODOLOGÍA DE LA INVESTIGACIÓN: DISEÑOS EXPERIMENTALES Y NO EXPERIMENTALESDocumento2 páginasMETODOLOGÍA DE LA INVESTIGACIÓN: DISEÑOS EXPERIMENTALES Y NO EXPERIMENTALESJhulian VillafuerteAún no hay calificaciones
- Elevador Clasificacion de PaquetesDocumento12 páginasElevador Clasificacion de PaquetesJhulian VillafuerteAún no hay calificaciones
- LABO6Documento5 páginasLABO6Jhulian VillafuerteAún no hay calificaciones
- Elon Musk Informe1Documento6 páginasElon Musk Informe1Jhulian VillafuerteAún no hay calificaciones
- LABO4Documento5 páginasLABO4Jhulian VillafuerteAún no hay calificaciones
- LABO2Documento4 páginasLABO2Jhulian VillafuerteAún no hay calificaciones
- Funciones analizador espectrosDocumento2 páginasFunciones analizador espectrosJhulian VillafuerteAún no hay calificaciones
- LABO1Documento5 páginasLABO1Jhulian VillafuerteAún no hay calificaciones
- Equipos ComercialesDocumento2 páginasEquipos ComercialesJhulian VillafuerteAún no hay calificaciones
- LABO5Documento4 páginasLABO5Jhulian VillafuerteAún no hay calificaciones
- Equipos ComercialesDocumento2 páginasEquipos ComercialesJhulian VillafuerteAún no hay calificaciones
- Marco TeóricoDocumento2 páginasMarco TeóricoJhulian VillafuerteAún no hay calificaciones
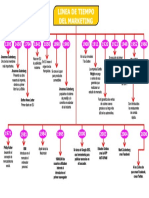
- Linea de Tiempo de MarketingDocumento1 páginaLinea de Tiempo de MarketingCARLOS ALBERTO SANCHEZ MOLLEDAAún no hay calificaciones
- Testeador de Software QA - Unidad 3.1 - Conocimiento Inicial Del ProyectoDocumento20 páginasTesteador de Software QA - Unidad 3.1 - Conocimiento Inicial Del ProyectoMaximiliano RaulAún no hay calificaciones
- Foro Definir Las Caracteristicas de Producto y Servicio 5Documento7 páginasForo Definir Las Caracteristicas de Producto y Servicio 5Cleyton Salas GonzalezAún no hay calificaciones
- Cable Utp SatraDocumento2 páginasCable Utp SatraGrupo contratista AycAún no hay calificaciones
- Switch Tp-Link Tl-sg1005d Serie Sg1005dDocumento1 páginaSwitch Tp-Link Tl-sg1005d Serie Sg1005dLuis Alfonso Quevedo RodriguezAún no hay calificaciones
- Bienvenidos!Documento1 páginaBienvenidos!Daniel StefflerAún no hay calificaciones
- Revisión de herramientas para evaluar la accesibilidad en la definición de requerimientos no funcionalesDocumento8 páginasRevisión de herramientas para evaluar la accesibilidad en la definición de requerimientos no funcionalesLeoForconesiAún no hay calificaciones
- FYR2023 Laboratorio Integrador E1Documento7 páginasFYR2023 Laboratorio Integrador E1Jose Rovelo Perez AlvarezAún no hay calificaciones
- Trabajo 1 Proyecto-SenaDocumento11 páginasTrabajo 1 Proyecto-SenaCamilo LatorreAún no hay calificaciones
- Espanhol Instrumental para Leitura (Nível 1) UfjfDocumento70 páginasEspanhol Instrumental para Leitura (Nível 1) UfjfVINICIUS MACUCO LEITE CARVALHAESAún no hay calificaciones
- 6.2.2.5 Lab - Configuring VLANs and Trunking - ILMDocumento15 páginas6.2.2.5 Lab - Configuring VLANs and Trunking - ILMJefferssonFlorezMenesesAún no hay calificaciones
- Actividad 2 Ejercicios de AutómatasDocumento9 páginasActividad 2 Ejercicios de AutómatasGus VazquezAún no hay calificaciones
- Presentación ZOOMDocumento22 páginasPresentación ZOOMPamela HidalgoAún no hay calificaciones
- Ejercicio de Ordena Las Sílabas y Forma Palabras 3Documento1 páginaEjercicio de Ordena Las Sílabas y Forma Palabras 3yeimy espitiaAún no hay calificaciones
- Cómo Puedo Configurar VoIP en Mi CasaDocumento77 páginasCómo Puedo Configurar VoIP en Mi CasaChad BurnettAún no hay calificaciones
- InyecciónDocumento68 páginasInyecciónindira puentesAún no hay calificaciones
- Tipos de Controles Asistidos Por ComputadorasDocumento24 páginasTipos de Controles Asistidos Por Computadoraskemberly oviedoAún no hay calificaciones
- Guia de Ejercicios 1 Pensamiento ComputacionalDocumento2 páginasGuia de Ejercicios 1 Pensamiento ComputacionalSofia GodoyAún no hay calificaciones
- Cuadro Comparativo Lectura Tradicional y DigitalDocumento2 páginasCuadro Comparativo Lectura Tradicional y Digitalmileidy vasquez garciaAún no hay calificaciones
- Requerimientos de software, análisis de costos y tipos de requerimientosDocumento21 páginasRequerimientos de software, análisis de costos y tipos de requerimientosCristo CarrilloAún no hay calificaciones
- Cuaderno de InformaticaDocumento8 páginasCuaderno de Informaticaapi-595277361Aún no hay calificaciones
- Prueba ObjetivaDocumento2 páginasPrueba ObjetivaIsabelitha Sihue DavilaAún no hay calificaciones
- IVU Actividad7 NombreapellidoDocumento3 páginasIVU Actividad7 NombreapellidoTHZZ BLAKEAún no hay calificaciones
- Guia GHDocumento1 páginaGuia GHSofia ReyesAún no hay calificaciones
- Picking TepalcatepecDocumento1 páginaPicking Tepalcatepechernandezjocelyn9766Aún no hay calificaciones
- Tutorial Activacion AUTOCADDocumento13 páginasTutorial Activacion AUTOCADGoti TorcalAún no hay calificaciones
- Cuadernillo Full StackDocumento80 páginasCuadernillo Full StackJennifer ArabelAún no hay calificaciones
- Dejo Hasta El Punto 14Documento28 páginasDejo Hasta El Punto 14Christhian LaurentAún no hay calificaciones
- Actividad 4 Mapa ConceptualDocumento3 páginasActividad 4 Mapa Conceptualashlee100% (1)
- Monitoria 1 AutocorrelaciónDocumento22 páginasMonitoria 1 AutocorrelaciónTomas UrregoAún no hay calificaciones