También podría gustarte
- Sistemas Hiperestaticos y Esfuerzos TermicosDocumento4 páginasSistemas Hiperestaticos y Esfuerzos TermicosSara Briseño67% (3)
- Investigacion Sistemas HiperestaticosDocumento5 páginasInvestigacion Sistemas HiperestaticosMaria GonzalesAún no hay calificaciones
- Trabajo de Investigacion 2Documento13 páginasTrabajo de Investigacion 2irvin esparzaAún no hay calificaciones
- Investigación Unidad 2Documento24 páginasInvestigación Unidad 2Ramón ManuelAún no hay calificaciones
- Principio de D AlembertDocumento17 páginasPrincipio de D AlembertAndrea MondayAún no hay calificaciones
- Unidad III Modelo Vibratorio Mem CalDocumento32 páginasUnidad III Modelo Vibratorio Mem CalRosas Ramirez MarianoAún no hay calificaciones
- Cla Sica 2008 AsdDocumento18 páginasCla Sica 2008 AsdStefhano Cancino BravoAún no hay calificaciones
- Amortiguamiento PDFDocumento1 páginaAmortiguamiento PDFSebastián Restrepo HernándezAún no hay calificaciones
- YoyoDocumento8 páginasYoyoOscar Alfonso Sandoval SaenzAún no hay calificaciones
- 14 - U 10 Vibraciones 2 GDL 2017Documento28 páginas14 - U 10 Vibraciones 2 GDL 2017Ercilia Eulalia MaldonadoAún no hay calificaciones
- Deformaciones vigasDocumento43 páginasDeformaciones vigasJorge Antonio Skorin TomičićAún no hay calificaciones
- Uclm Tema3Documento0 páginasUclm Tema3Amaury BarronAún no hay calificaciones
- Sistemas de amortiguación para edificiosDocumento54 páginasSistemas de amortiguación para edificiosJose Luis VelandiaAún no hay calificaciones
- Analogias o Equivalencias Entre Sistemas Mecanicos y Eléctricos FinalDocumento18 páginasAnalogias o Equivalencias Entre Sistemas Mecanicos y Eléctricos FinalPablo Andres VintimillaAún no hay calificaciones
- Rigoberto - 2.1,2.2,2.3 Mecanaica de MaterialesDocumento14 páginasRigoberto - 2.1,2.2,2.3 Mecanaica de MaterialesRIGOBERTO MARIN OVIEDOAún no hay calificaciones
- Método de Los Tres MomentosDocumento6 páginasMétodo de Los Tres Momentosjhon ivanAún no hay calificaciones
- Osciladores AcopladosDocumento7 páginasOsciladores AcopladosYendry Alexandra BlancoAún no hay calificaciones
- Informe Oscilador TorsionalDocumento4 páginasInforme Oscilador TorsionalNicolas don't bother with my lastname0% (1)
- Universidad de Guayaquil Matematicas IIIDocumento16 páginasUniversidad de Guayaquil Matematicas IIIJoel Leo Ac DcAún no hay calificaciones
- Aplicaciones del Álgebra Lineal en IngenieríaDocumento13 páginasAplicaciones del Álgebra Lineal en IngenieríaJuan PindoAún no hay calificaciones
- Evaluación examen vibraciones mecánicasDocumento30 páginasEvaluación examen vibraciones mecánicasEdwin Paco Poveda100% (1)
- Ecuaciones Diferenciales Aplicados A La CarreraDocumento22 páginasEcuaciones Diferenciales Aplicados A La Carrerayamely portaAún no hay calificaciones
- Unidad V Vib. MecanicasDocumento17 páginasUnidad V Vib. MecanicasrobertoAún no hay calificaciones
- Constante elástica de resortes: determinación experimentalDocumento11 páginasConstante elástica de resortes: determinación experimentalAngelli Cossio QuiñonesAún no hay calificaciones
- Fisic Segundo Principio de Newton EjerciciosDocumento10 páginasFisic Segundo Principio de Newton EjerciciosCONSTANZA ANGÉLICA ARAVENA ESPINOZAAún no hay calificaciones
- 03 Sistemas de Masa VariableDocumento13 páginas03 Sistemas de Masa VariableLizeth Blanco QAún no hay calificaciones
- Proyecto 2 de Ecuaciones DiferencialesDocumento16 páginasProyecto 2 de Ecuaciones DiferencialesKaritOo HuarachaAún no hay calificaciones
- Método MatricialDocumento109 páginasMétodo MatricialIrma Blanca MenesesAún no hay calificaciones
- F2Clases08 Clase de Ondas DepineDocumento7 páginasF2Clases08 Clase de Ondas DepineMarco RssAún no hay calificaciones
- Vibraciones libres de sistemas de un grado de libertadDocumento17 páginasVibraciones libres de sistemas de un grado de libertadVickman PenagosAún no hay calificaciones
- Modelo masa resorteDocumento15 páginasModelo masa resortedfgsrgsAún no hay calificaciones
- Sistema Mecanico TraslacionalDocumento18 páginasSistema Mecanico Traslacionalmoiseszav21Aún no hay calificaciones
- Viga hiperestática - Método de elementos finitosDocumento13 páginasViga hiperestática - Método de elementos finitosJC Casafranca Sayas100% (1)
- C02 Metodo DirectoDocumento81 páginasC02 Metodo DirectoNicolàs Ortega GarcìaAún no hay calificaciones
- Ayudantía 1Documento3 páginasAyudantía 1RodrigoEduardoVillalobosBarrazaAún no hay calificaciones
- Metodos de Determinacion de La FlexibilidadDocumento11 páginasMetodos de Determinacion de La Flexibilidad05-ES-HU-DIEGO JESUS ORDOÑEZ RODRIGUEZAún no hay calificaciones
- Modelo Matematico de Sistemas DinamicosDocumento43 páginasModelo Matematico de Sistemas DinamicosMichel CMAún no hay calificaciones
- Informe Lab Plano InclinadoDocumento4 páginasInforme Lab Plano InclinadoCarlos MarioAún no hay calificaciones
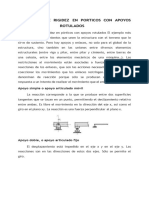
- Informe Metodo de Riridez en Portico Con Apoyo RotuladoDocumento24 páginasInforme Metodo de Riridez en Portico Con Apoyo RotuladoviajerostraveltarapotoAún no hay calificaciones
- DeterminantesDocumento14 páginasDeterminantesJaneth RomeroAún no hay calificaciones
- Vibraciones UiiDocumento17 páginasVibraciones UiiKishoman Arcos Vazquez50% (4)
- Uclm Tema3.pdf1Documento15 páginasUclm Tema3.pdf1xxxdevil007Aún no hay calificaciones
- Método Matricial de Las Corrientes de MallaDocumento5 páginasMétodo Matricial de Las Corrientes de Mallamiki_1993_167% (3)
- "Universidad Nacional de San Cristóbal de HuamangaDocumento15 páginas"Universidad Nacional de San Cristóbal de HuamangaDeyvi Heredia VillalobosAún no hay calificaciones
- Metodo de Las FlexibilidadesDocumento6 páginasMetodo de Las Flexibilidadesmarcomac2000Aún no hay calificaciones
- Estructuras Valores y VectoresDocumento10 páginasEstructuras Valores y VectoresLuis Alberto CurasiAún no hay calificaciones
- Tema 6 SistemasDocumento38 páginasTema 6 SistemasrubiacordobessaAún no hay calificaciones
- Vibracion LibreDocumento14 páginasVibracion LibreAntonio Zamora86% (7)
- Resumenes y ProblemasDocumento16 páginasResumenes y ProblemasJavier RodriguezAún no hay calificaciones
- OscilacionesDocumento24 páginasOscilacionesRaul Cerron GarciaAún no hay calificaciones
- Método de los tres momentos y distribución de momentos para el análisis de vigas continuasDocumento37 páginasMétodo de los tres momentos y distribución de momentos para el análisis de vigas continuasadtino100% (1)
- Vibraciones mecánicas: práctica para verano sobre frecuencias naturales y amortiguamientoDocumento37 páginasVibraciones mecánicas: práctica para verano sobre frecuencias naturales y amortiguamientoRuddy Gallardo RoblesAún no hay calificaciones
- Vibraciones Libres - TRABAJO 1Documento7 páginasVibraciones Libres - TRABAJO 1Fernando Vilca CoronadoAún no hay calificaciones
- Sistemas vibratorios de dos grados de libertadDocumento49 páginasSistemas vibratorios de dos grados de libertadAugusto EspinozaAún no hay calificaciones
- Unidad Ii PDFDocumento20 páginasUnidad Ii PDFcarlos alverto leon sanchezAún no hay calificaciones
- BAZALAR VARGAS LAB03 InformeDocumento25 páginasBAZALAR VARGAS LAB03 InformeLuis AguirreAún no hay calificaciones
- Reporte de Lectura Unidad 4Documento5 páginasReporte de Lectura Unidad 4luisillo244Aún no hay calificaciones
- RESUMENDocumento3 páginasRESUMENluisillo244Aún no hay calificaciones
- Diapositivas de Derechos de Autor Upav 601 Mayo 2023Documento31 páginasDiapositivas de Derechos de Autor Upav 601 Mayo 2023luisillo244Aún no hay calificaciones
- Derecho Romano 03032022Documento3 páginasDerecho Romano 03032022luisillo244Aún no hay calificaciones
- Mapa Conceptual 17022022Documento3 páginasMapa Conceptual 17022022luisillo244Aún no hay calificaciones
- La teoría de los derechos patrimoniales en Derecho RomanoDocumento8 páginasLa teoría de los derechos patrimoniales en Derecho Romanoluisillo244Aún no hay calificaciones
- Derecho Romano 10022022Documento3 páginasDerecho Romano 10022022luisillo244Aún no hay calificaciones
- Derecho Romano 10022022Documento3 páginasDerecho Romano 10022022luisillo244Aún no hay calificaciones
- Derecho Romano 13012022Documento2 páginasDerecho Romano 13012022luisillo244Aún no hay calificaciones
- Derecho Romano 24032022Documento3 páginasDerecho Romano 24032022luisillo244Aún no hay calificaciones
- Derecho Romano 20012022Documento2 páginasDerecho Romano 20012022luisillo244Aún no hay calificaciones
- Historia Del CNCDocumento9 páginasHistoria Del CNCluisillo244Aún no hay calificaciones
- Formato DenunciaDocumento2 páginasFormato DenunciaJOSE MANUELAún no hay calificaciones
- Derecho Romano 03022022Documento3 páginasDerecho Romano 03022022luisillo244Aún no hay calificaciones
- Humanismo y Debate de La Modernidad.Documento3 páginasHumanismo y Debate de La Modernidad.luisillo244Aún no hay calificaciones
- Humanismo Del Siglo XxiDocumento2 páginasHumanismo Del Siglo Xxiluisillo244Aún no hay calificaciones
- Procesos PetDocumento3 páginasProcesos Petluisillo244Aún no hay calificaciones
- La Filosofía de William Edwards Deming1Documento9 páginasLa Filosofía de William Edwards Deming1luisillo244Aún no hay calificaciones
- EngraneDocumento5 páginasEngraneluisillo244Aún no hay calificaciones
- Silo - Tips - Colegio de Bachilleres de ChiapasDocumento26 páginasSilo - Tips - Colegio de Bachilleres de ChiapasValeria GarcíaAún no hay calificaciones
- CHIRINOS CÉSPEDES Prod Acad 01 MatIIIDocumento11 páginasCHIRINOS CÉSPEDES Prod Acad 01 MatIIIcrisferAún no hay calificaciones
- Taller 1 Matemáticas Tercer Periodo SergioDocumento17 páginasTaller 1 Matemáticas Tercer Periodo Sergiokokito riosAún no hay calificaciones
- JANAMPA - Atividad N° 2Documento5 páginasJANAMPA - Atividad N° 2Paco JlAún no hay calificaciones
- Informe Topo 1 Por SiDocumento10 páginasInforme Topo 1 Por SiZoila MuzoAún no hay calificaciones
- 10.conclusiones y RecomendacionesDocumento2 páginas10.conclusiones y Recomendacioneskertesz25Aún no hay calificaciones
- ¿Cómo Se Usa La Biotecnología en La Ciencia Forense?Documento1 página¿Cómo Se Usa La Biotecnología en La Ciencia Forense?Adrianis GilAún no hay calificaciones
- PachecoDocumento5 páginasPachecoGuillermo Muñoz MadridAún no hay calificaciones
- Chorro ChocóDocumento12 páginasChorro ChocóJoaoQuijanoAún no hay calificaciones
- Guia Proyectos de GestiónDocumento39 páginasGuia Proyectos de GestiónYulieth PerdomoAún no hay calificaciones
- Guia - de - Aprendizaje # 2 TECNOLOGIA BIOMEDICA IDocumento5 páginasGuia - de - Aprendizaje # 2 TECNOLOGIA BIOMEDICA ISebastian NarvaezAún no hay calificaciones
- Evaluación biomecánica posturalDocumento5 páginasEvaluación biomecánica posturalmayAún no hay calificaciones
- Materiales Sistemas TecnologiasDocumento241 páginasMateriales Sistemas TecnologiasLucía Alvarez Roldán100% (1)
- Interpolación y ajuste de curvas polinómicasDocumento14 páginasInterpolación y ajuste de curvas polinómicasLlocclla Ccasani GloriaAún no hay calificaciones
- 23 - Deiner MenesesDocumento11 páginas23 - Deiner MenesesDEINERAún no hay calificaciones
- Archivodiapositiva 2022520113641Documento21 páginasArchivodiapositiva 2022520113641AMADA BETSABE PINTO ARANAAún no hay calificaciones
- Buacar (2022) Desenredando La CienciaDocumento410 páginasBuacar (2022) Desenredando La CienciaSichuanAún no hay calificaciones
- Apuntes EscolaresDocumento6 páginasApuntes EscolarestonoAún no hay calificaciones
- Sesion Los Elementos de La CoDocumento9 páginasSesion Los Elementos de La CoNilsa Velarde CastroAún no hay calificaciones
- 4-Sistema Masa-Resorte Estatico 2021-1Documento3 páginas4-Sistema Masa-Resorte Estatico 2021-1Juan David RenteriaAún no hay calificaciones
- Fase 2 - Preguntas Orientadoras Web 1Documento4 páginasFase 2 - Preguntas Orientadoras Web 1ARIEL MONTENEGROAún no hay calificaciones
- AmicaDocumento4 páginasAmicaGuayaquil 707Aún no hay calificaciones
- Matem 129-130 (S21d1)Documento2 páginasMatem 129-130 (S21d1)deysi herrera0% (1)
- Unidad 2 - Derecho Agroambiental IDocumento30 páginasUnidad 2 - Derecho Agroambiental IAndres DuranAún no hay calificaciones
- Una Silenciosa RevoluciónDocumento104 páginasUna Silenciosa RevoluciónDERMUMPERUAún no hay calificaciones
- Habilidades para La VidaDocumento14 páginasHabilidades para La VidaDepartamento EvaluaciónAún no hay calificaciones
- Calentamiento NeuromuscularDocumento12 páginasCalentamiento NeuromuscularVicente Peña57% (7)
- NECHÍDocumento232 páginasNECHÍJose Gamaliel Medina HenaoAún no hay calificaciones
- Actividades Recursos PersonalesDocumento4 páginasActividades Recursos PersonalesPaola CelyAún no hay calificaciones
- Manual de Bolsillo EterboardDocumento44 páginasManual de Bolsillo EterboardFernando QuirozAún no hay calificaciones