También podría gustarte
- Transición de Bípedo A Sedente en Una Persona NormalDocumento4 páginasTransición de Bípedo A Sedente en Una Persona Normalj100% (2)
- Tabla Termodinamica de Agua Sistema InglesDocumento9 páginasTabla Termodinamica de Agua Sistema Inglesasert12360% (5)
- Variaciones de La MarchaDocumento6 páginasVariaciones de La MarchaFrancisca Maturana67% (3)
- Test de Apoyo MonopodalDocumento1 páginaTest de Apoyo MonopodalVannia Reyes NovoaAún no hay calificaciones
- Propuesta de evaluación e intervención para pacientes hospitalizados con síndrome de desacondicionamiento físico (SDF)De EverandPropuesta de evaluación e intervención para pacientes hospitalizados con síndrome de desacondicionamiento físico (SDF)Aún no hay calificaciones
- Trabajo Colaborativo Fisica 24-11-2020Documento20 páginasTrabajo Colaborativo Fisica 24-11-2020Ana Mile Martin RomeroAún no hay calificaciones
- Guía de atención a personas con trauma raquimedular cervical: Enfoque desde la terapia ocupacionalDe EverandGuía de atención a personas con trauma raquimedular cervical: Enfoque desde la terapia ocupacionalAún no hay calificaciones
- Campo Eléctrico y Potencial Eléctrico Lab Fisica 3 Lab 4Documento13 páginasCampo Eléctrico y Potencial Eléctrico Lab Fisica 3 Lab 4Dany GuzmanAún no hay calificaciones
- 15 Biomecanica de Lamarcha PDFDocumento45 páginas15 Biomecanica de Lamarcha PDFJudit TrujilloAún no hay calificaciones
- La relevancia del entrenamiento propioceptivo en la recuperación funcional de pacientes con artrosis en la base del pulgar: Estudio prospectivo de cohorte aleatorizado multicéntricoDe EverandLa relevancia del entrenamiento propioceptivo en la recuperación funcional de pacientes con artrosis en la base del pulgar: Estudio prospectivo de cohorte aleatorizado multicéntricoAún no hay calificaciones
- HIDROCINESITERAPIADocumento15 páginasHIDROCINESITERAPIAsindy melendezAún no hay calificaciones
- Evaluacion FT LumbalgiaDocumento9 páginasEvaluacion FT Lumbalgiamaria joseAún no hay calificaciones
- Biomecanica de La RodillaDocumento47 páginasBiomecanica de La RodillaJulio PerniaAún no hay calificaciones
- Cuadro CIFDocumento2 páginasCuadro CIFjoseline2014Aún no hay calificaciones
- Método de KaltenbornDocumento15 páginasMétodo de KaltenbornAlexis BernillaAún no hay calificaciones
- Ficha de Evaluación Fisio UmssDocumento10 páginasFicha de Evaluación Fisio UmssGonzalo Fernandez100% (1)
- Guía de Atención FisioterapiaDocumento10 páginasGuía de Atención FisioterapiaARLINTON FERNANDO VELASQUEZ CARVAJALAún no hay calificaciones
- Marcha en AmputadosDocumento55 páginasMarcha en AmputadosEdwin Martínez100% (2)
- Luxofractura de Tobillo - KinesiologiaDocumento39 páginasLuxofractura de Tobillo - KinesiologiaCinthya Fuentes100% (3)
- Plan de Tratamiento FisioterapiaDocumento3 páginasPlan de Tratamiento FisioterapiaCarlos alvaradoAún no hay calificaciones
- Tarea 4 End Feel Diego RiobuenoDocumento1 páginaTarea 4 End Feel Diego RiobuenoJuan Pablo LagosAún no hay calificaciones
- Prueba de Elevación de La Pierna ExtendidaDocumento1 páginaPrueba de Elevación de La Pierna ExtendidaMarcela MartinezAún no hay calificaciones
- Parámetros Espaciotemporales de La MarchaDocumento4 páginasParámetros Espaciotemporales de La MarchaKarina AlmazánAún no hay calificaciones
- Recuperación Relativa. BobathDocumento48 páginasRecuperación Relativa. BobathCarlysbel Figueroa100% (1)
- Buerguer AllenDocumento8 páginasBuerguer AllenZoguroAún no hay calificaciones
- ESTIRAMIENTO Apuntes AutoguardadoDocumento35 páginasESTIRAMIENTO Apuntes AutoguardadoRuth Pacheco100% (1)
- Crank TestDocumento2 páginasCrank TestNathalia Sola PérezAún no hay calificaciones
- Protocolo de Manejo Fisioterapeutico de EscoliosisDocumento10 páginasProtocolo de Manejo Fisioterapeutico de Escoliosissebastian vilchesAún no hay calificaciones
- Cif DG KinesicoussDocumento41 páginasCif DG Kinesicousskinesioloquillos100% (1)
- KaltenbornDocumento9 páginasKaltenbornLara YannickAún no hay calificaciones
- Bases de La GoniometríaDocumento3 páginasBases de La GoniometríaAdrián MorganAún no hay calificaciones
- Sindrome de La Pata de GansoDocumento4 páginasSindrome de La Pata de GansoUri ClaroAún no hay calificaciones
- Tecnica KabatDocumento25 páginasTecnica KabatHannibal Korzakov100% (1)
- Metodo PerfettiDocumento1 páginaMetodo PerfettiPaula MartinezAún no hay calificaciones
- Biomecanica Del Lanzamiento Del BeisbolDocumento4 páginasBiomecanica Del Lanzamiento Del BeisbolAlexaAún no hay calificaciones
- Terminología OrtopédicaDocumento22 páginasTerminología OrtopédicaEnrique Brisuela50% (2)
- Biomecanica de Hombro y CaderaDocumento35 páginasBiomecanica de Hombro y Caderadiliana sotoAún no hay calificaciones
- Tecnica de Orientacion o Aprendizaje Basado en Las TareasDocumento4 páginasTecnica de Orientacion o Aprendizaje Basado en Las TareasYorle Martinez RoblesAún no hay calificaciones
- Fecha:: No Valorado 0 1 2 3 4 5 6 7 8 9 10Documento13 páginasFecha:: No Valorado 0 1 2 3 4 5 6 7 8 9 10José DavidAún no hay calificaciones
- KaltenbornDocumento4 páginasKaltenbornYoy CarrilloAún no hay calificaciones
- MackenzieDocumento2 páginasMackenzieMiguelangel AlemánAún no hay calificaciones
- 19 TecnicasDocumento1 página19 TecnicasPablo Cuevas SaldivarAún no hay calificaciones
- Rehabilitación Del Paciente AmputadoDocumento61 páginasRehabilitación Del Paciente Amputadojoseph100% (1)
- GUIA N 2 - Ejercicios de CodmanDocumento12 páginasGUIA N 2 - Ejercicios de CodmanJoelAún no hay calificaciones
- Comparacion de Enfoques de TtoDocumento9 páginasComparacion de Enfoques de TtoCarlos Andres Quiroz Mora100% (4)
- EstiramientosDocumento8 páginasEstiramientosEduardo Galdamez50% (2)
- Método PhelpsDocumento11 páginasMétodo PhelpsJuanita MonterrosoAún no hay calificaciones
- Terminología BásicaDocumento6 páginasTerminología BásicaLuisArroyoAún no hay calificaciones
- CLASIFICACIÓN de La CinesiterapiaDocumento22 páginasCLASIFICACIÓN de La CinesiterapiaGabriela César100% (1)
- Hemiplejia BobathDocumento30 páginasHemiplejia BobathMabel Danitza Soto QuispilayaAún no hay calificaciones
- Concepto HALLIWICKDocumento18 páginasConcepto HALLIWICKMaria Paz Oxolon SalvadorAún no hay calificaciones
- Cinesiterapia y MecanoterapiaDocumento3 páginasCinesiterapia y Mecanoterapiaisabela camargoAún no hay calificaciones
- Integridad Refleja PDFDocumento46 páginasIntegridad Refleja PDFKaren OrtizAún no hay calificaciones
- Analisis Visual de Marcha Carr-ShepherdDocumento1 páginaAnalisis Visual de Marcha Carr-ShepherdRosa AcevedoAún no hay calificaciones
- Evaluacion Kinesica PosturalDocumento10 páginasEvaluacion Kinesica PosturalJoselinne Vargas CardenasAún no hay calificaciones
- MIEMBRO SUPERIOR FNP 3Documento51 páginasMIEMBRO SUPERIOR FNP 3AJ José Almonacid100% (1)
- Evaluacion de Columna VertebralDocumento22 páginasEvaluacion de Columna VertebralLu Padilla83% (6)
- Evaluacion Articular GONIOMETRIADocumento1 páginaEvaluacion Articular GONIOMETRIAPaulö Tello LuzaAún no hay calificaciones
- Cadenas CineticasDocumento24 páginasCadenas CineticasyesheniaAún no hay calificaciones
- Cuaderno de actividades prácticas en neurofacilitaciónDe EverandCuaderno de actividades prácticas en neurofacilitaciónAún no hay calificaciones
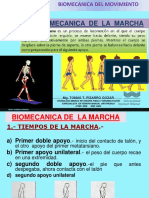
- Biomecanica de La MarchaDocumento9 páginasBiomecanica de La MarchaSteffy SandovalAún no hay calificaciones
- Clase 3 y 4 - Analisis de La Marcha PDFDocumento81 páginasClase 3 y 4 - Analisis de La Marcha PDFmanuela canoAún no hay calificaciones
- Deformaciones Admisibles para Las Capas Del Pavimento AsfalticoDocumento10 páginasDeformaciones Admisibles para Las Capas Del Pavimento AsfalticoÇs LeonelAún no hay calificaciones
- FT Vasa-101Documento2 páginasFT Vasa-101Mauricio ceballosAún no hay calificaciones
- A8 EjerciciosDocumento4 páginasA8 EjerciciosIan EspinozaAún no hay calificaciones
- Trabajo de Ciencias 9BDocumento12 páginasTrabajo de Ciencias 9BjosueortizAún no hay calificaciones
- Diagrama de Esfuerzo 2Documento2 páginasDiagrama de Esfuerzo 2Marlon GutierrezAún no hay calificaciones
- 5 Calculos Caida e Intensidad ElectricaDocumento17 páginas5 Calculos Caida e Intensidad ElectricaDaniel Omar Vasquez ZegarraAún no hay calificaciones
- Vibraciones Libres y ForzadasDocumento14 páginasVibraciones Libres y ForzadasDeyvid Leonel Castro ArcelaAún no hay calificaciones
- Programa Curso Resistencia de Materiales 2020-2 PDFDocumento3 páginasPrograma Curso Resistencia de Materiales 2020-2 PDFJessus David Gutiérrez TeránAún no hay calificaciones
- Glosario de FisicaDocumento11 páginasGlosario de FisicaGloriely Lucia Espinoza Pereira100% (1)
- ViscosidadDocumento33 páginasViscosidadCesar MendozaAún no hay calificaciones
- Ensayo Segunda Ley de La TermodinamicaDocumento4 páginasEnsayo Segunda Ley de La Termodinamicaegb75% (4)
- Curso Diseño de Losas Vigueta y BovedillaDocumento66 páginasCurso Diseño de Losas Vigueta y BovedillaOmar Luna J.Aún no hay calificaciones
- MRUV para Segundo Grado de SecundariaDocumento5 páginasMRUV para Segundo Grado de SecundariaMARIA DE LOS ANGELES PUESCAS TAVARAAún no hay calificaciones
- Calculo Experimental de La Gravedad 1Documento4 páginasCalculo Experimental de La Gravedad 1Yenire AguilarAún no hay calificaciones
- 1CIV22 T9-B Criterios Desempeño Sísmico-Caso Edificios Reforzados-ACI 562-16Documento16 páginas1CIV22 T9-B Criterios Desempeño Sísmico-Caso Edificios Reforzados-ACI 562-16HEMERSON LIZARBE ALARCONAún no hay calificaciones
- Laboratorio #1 Mecanica de MaterialesDocumento8 páginasLaboratorio #1 Mecanica de MaterialesMemonroy MAún no hay calificaciones
- Electromagnetismo PDFDocumento4 páginasElectromagnetismo PDFadalaviAún no hay calificaciones
- Variables FísicasDocumento35 páginasVariables FísicasCamilo CotrinoAún no hay calificaciones
- Guía de Apendizaje DinámicaDocumento6 páginasGuía de Apendizaje DinámicaBrassy JarlAún no hay calificaciones
- Proyecto Maquina de GolberDocumento10 páginasProyecto Maquina de GolberLUIS ALEXANDER PULLOQUINGA ESCOBARAún no hay calificaciones
- Termodinámica 2021Documento7 páginasTermodinámica 2021Andres ValenciaAún no hay calificaciones
- Diseno Sismico Primera Clase UNHEVALDocumento136 páginasDiseno Sismico Primera Clase UNHEVALBryan MartelAún no hay calificaciones
- Medición de Caudales en Conductos AbiertosDocumento10 páginasMedición de Caudales en Conductos AbiertosMario Jose Taype HuertasAún no hay calificaciones
- Politejo Catambidur 2143814660526e95a31ab1aDocumento48 páginasPolitejo Catambidur 2143814660526e95a31ab1anmcarlosAún no hay calificaciones
- GENERADORES CC - Ing. Efrain de La Cruz PDFDocumento77 páginasGENERADORES CC - Ing. Efrain de La Cruz PDFChristian DanielAún no hay calificaciones
- TEMA 22 4to de Secundaria - CAIDA LIBREDocumento3 páginasTEMA 22 4to de Secundaria - CAIDA LIBRERuben Vidal Flores SernaAún no hay calificaciones
- MecanismosDocumento28 páginasMecanismoskatiaAún no hay calificaciones