También podría gustarte
- Convolución de Funciones y Evaluación Por Métodos Numéricos y La Transformada de LaplaceDocumento13 páginasConvolución de Funciones y Evaluación Por Métodos Numéricos y La Transformada de LaplaceEduardo PastorAún no hay calificaciones
- LAB01 - Informe Pendulo InvertidoDocumento25 páginasLAB01 - Informe Pendulo InvertidosaulAún no hay calificaciones
- RobotDocumento5 páginasRobotsupconAún no hay calificaciones
- Robot 2DFDocumento5 páginasRobot 2DFsupconAún no hay calificaciones
- Análisis Matemático BasicoDocumento6 páginasAnálisis Matemático BasicoHector DomensainAún no hay calificaciones
- Laboratorio de Control ModernoDocumento6 páginasLaboratorio de Control ModernoJorge SilvaAún no hay calificaciones
- Informe SCDDocumento23 páginasInforme SCDROSAS MONTALVO JESUSAún no hay calificaciones
- Clase 18 Conv AplicDocumento8 páginasClase 18 Conv AplicCristian NarváezAún no hay calificaciones
- TallerDocumento5 páginasTallerMelany RuizAún no hay calificaciones
- Simulación Error Estado Estable y Lugar A RaicesDocumento32 páginasSimulación Error Estado Estable y Lugar A Raicesseebass srosrAún no hay calificaciones
- Composición PctexDocumento20 páginasComposición PctexWilliam Bladimir Quise Huaylla100% (1)
- Pendulo Invertido Jefferson JaimesDocumento4 páginasPendulo Invertido Jefferson Jaimesjefferson jaimesAún no hay calificaciones
- Trabajo N°2 - Grupo 11Documento8 páginasTrabajo N°2 - Grupo 11Leonardo Bolivar VillegasAún no hay calificaciones
- Modelo PInvDocumento2 páginasModelo PInvTonatiuh CortésAún no hay calificaciones
- Apunte MD2020Documento39 páginasApunte MD2020JUAN ANTONIO EYZAGUIRRE ABARZUAAún no hay calificaciones
- CAPITULO - V (Diferenciacion) PRELIMINARDocumento20 páginasCAPITULO - V (Diferenciacion) PRELIMINARLourdesAún no hay calificaciones
- Modelado de Un Péndulo SimpleDocumento3 páginasModelado de Un Péndulo SimpleAilybb ApminathorAún no hay calificaciones
- Entrega4 ResolucionDocumento7 páginasEntrega4 ResolucionRubenAún no hay calificaciones
- Centro de Ingenier Ia y Desarrollo Industrial: Modelado y Simulaci On de Sistemas Por ComputadoraDocumento4 páginasCentro de Ingenier Ia y Desarrollo Industrial: Modelado y Simulaci On de Sistemas Por ComputadoraAilybb ApminathorAún no hay calificaciones
- Clase 16. Resolucion de PVI Usando TransformadasDocumento9 páginasClase 16. Resolucion de PVI Usando TransformadasMacarena AraosAún no hay calificaciones
- GuiaEjercicios 5Documento14 páginasGuiaEjercicios 5Rywer Luna choqueAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Tarea 1 Funciones de Varias Variables y Diferenciació NDocumento10 páginasGuía de Actividades y Rúbrica de Evaluación - Tarea 1 Funciones de Varias Variables y Diferenciació NJose Antonio Deaza Amaya100% (1)
- Longitud de Arco de Curvas Parametricas Archivos - El Blog de LeoDocumento1 páginaLongitud de Arco de Curvas Parametricas Archivos - El Blog de LeoAndrade KAún no hay calificaciones
- Intituto Nacional de MexicoDocumento35 páginasIntituto Nacional de MexicoAlondra G.CAún no hay calificaciones
- Fase 5 - Trabajo PrácticoDocumento18 páginasFase 5 - Trabajo PrácticoJairo GuevaraAún no hay calificaciones
- Fundamentos Método MontecarloDocumento10 páginasFundamentos Método MontecarloRaúl Mejía GAún no hay calificaciones
- Ejercicios Guía III (Maulhardt) - PandemiaDocumento14 páginasEjercicios Guía III (Maulhardt) - Pandemiaagomezalejo99Aún no hay calificaciones
- Herramientas Matematicas ModelamientoDocumento21 páginasHerramientas Matematicas ModelamientoJuan Sebastian Hincapie MontesAún no hay calificaciones
- DSP Cap 05 ConvolucionDocumento28 páginasDSP Cap 05 ConvolucionjoshernandezAún no hay calificaciones
- Extremos RestringidosDocumento26 páginasExtremos RestringidosMatAún no hay calificaciones
- 2 Integracion Con Condiciones InicialesDocumento6 páginas2 Integracion Con Condiciones InicialesMiguel VelizAún no hay calificaciones
- Parcial Tercer CorteDocumento28 páginasParcial Tercer Cortecarlos hernandezAún no hay calificaciones
- Modelo Matematico de Pendulo InvertidoDocumento7 páginasModelo Matematico de Pendulo InvertidoJerson SebastianAún no hay calificaciones
- Problema Trompo - Samuel MartínDocumento6 páginasProblema Trompo - Samuel MartínSamu MgAún no hay calificaciones
- Unidad 1 - Trabajo Colaborativo - 233Documento21 páginasUnidad 1 - Trabajo Colaborativo - 233pablo cesar gonzalez camachoAún no hay calificaciones
- CALCULOII LFM NOTAS1AlumnosDocumento14 páginasCALCULOII LFM NOTAS1Alumnosalanmeco456Aún no hay calificaciones
- Función de TransferenciaDocumento7 páginasFunción de TransferenciaJhonatan EstradaAún no hay calificaciones
- Metodos IntegracionDocumento18 páginasMetodos IntegracionFlorAún no hay calificaciones
- Pauta Ayudantía N°5Documento4 páginasPauta Ayudantía N°5Juan David CruzAún no hay calificaciones
- Análisis Matemático II Final - Bautista SánchezDocumento110 páginasAnálisis Matemático II Final - Bautista SánchezBaty SánchezAún no hay calificaciones
- Paso 4 - Actividad de Los Fundamentos y Reglas de DerivaciónDocumento9 páginasPaso 4 - Actividad de Los Fundamentos y Reglas de DerivaciónSharryth DiazAún no hay calificaciones
- Bloque 2 Tema 2Documento102 páginasBloque 2 Tema 2Javier Payá OliverAún no hay calificaciones
- La Función Derivada (Iniciación)Documento3 páginasLa Función Derivada (Iniciación)María Pilar Sierra LabartaAún no hay calificaciones
- Ayudantia6 PautaDocumento5 páginasAyudantia6 PautaLucas MontielAún no hay calificaciones
- Ejercicios 3,7 y 11Documento5 páginasEjercicios 3,7 y 11Niyireth GomezAún no hay calificaciones
- Transformada LaplaceDocumento7 páginasTransformada LaplaceLoveli Suero PimentelAún no hay calificaciones
- Laboratorio 1Documento10 páginasLaboratorio 1jorgeAún no hay calificaciones
- Taller de DerivadaDocumento8 páginasTaller de DerivadaCamila RamosAún no hay calificaciones
- Criterio NyquistDocumento8 páginasCriterio NyquistJuan GomezAún no hay calificaciones
- Examen Parcial SolucionDocumento9 páginasExamen Parcial Solucionjean HP100% (1)
- Evidencia de Aprendizaje Unidad 3Documento5 páginasEvidencia de Aprendizaje Unidad 3Roberto Antonio PerezAún no hay calificaciones
- Fase 3 Aporte2Documento15 páginasFase 3 Aporte2german.toro3885Aún no hay calificaciones
- Cal2 Gu As I 2023 (5)Documento2 páginasCal2 Gu As I 2023 (5)cintia lizamaAún no hay calificaciones
- Proyecto de Analisis NuméricoDocumento8 páginasProyecto de Analisis NuméricoCarlos Arturo Reynoso BendezúAún no hay calificaciones
- Informe PrevioDocumento16 páginasInforme PrevioOmar David Peña IbarraAún no hay calificaciones
- Actividad Integradora Salmuera 2Documento5 páginasActividad Integradora Salmuera 2MarcoAlcantaraEscaMapAún no hay calificaciones
- Laboratorio 1 SCDDocumento7 páginasLaboratorio 1 SCDbrayan vilela villegasAún no hay calificaciones
- OÑA PALLO 1er TrabajoDocumento29 páginasOÑA PALLO 1er TrabajoLuis OñaAún no hay calificaciones
- 3 10 Teorema de ConvolucionDocumento8 páginas3 10 Teorema de ConvolucionGadiel Rodriguez100% (1)
- KukumDocumento17 páginasKukumTonatiuh CortésAún no hay calificaciones
- Cuestionario TurbinasDocumento4 páginasCuestionario TurbinasTonatiuh CortésAún no hay calificaciones
- Reporte Práctica 3 TSPDocumento9 páginasReporte Práctica 3 TSPTonatiuh CortésAún no hay calificaciones
- Modelo PInvDocumento2 páginasModelo PInvTonatiuh CortésAún no hay calificaciones
- EBCDocumento15 páginasEBCIP ProgramaciónAún no hay calificaciones
- Correspondencia GrafonómicaDocumento5 páginasCorrespondencia GrafonómicaTama KunAún no hay calificaciones
- 8 Acta General AcordsDocumento4 páginas8 Acta General AcordsAdriAún no hay calificaciones
- Que Es Patologias Del ConcretoDocumento4 páginasQue Es Patologias Del ConcretoOlenka ChávezAún no hay calificaciones
- Programa de Cursos - ICCAEDocumento4 páginasPrograma de Cursos - ICCAEEmerson GomezAún no hay calificaciones
- Elementos de Máquinas - Uniones Atornilladas PDFDocumento30 páginasElementos de Máquinas - Uniones Atornilladas PDFVictor Guillermo Lanchipa GamarraAún no hay calificaciones
- Reseña Histórica de Los Ferrocarriles en El PerúDocumento15 páginasReseña Histórica de Los Ferrocarriles en El PerúMERLINAún no hay calificaciones
- Pablollumiluisa Estadística 7Documento7 páginasPablollumiluisa Estadística 7Pablo Llumiluisa100% (1)
- Termino Excluido 4Documento8 páginasTermino Excluido 4angely2Aún no hay calificaciones
- Entregable 1. BlogDocumento7 páginasEntregable 1. BlogFernanda GualteroAún no hay calificaciones
- Control 5 Auditoria de SistemasDocumento4 páginasControl 5 Auditoria de SistemasFrancisca Covarrubias CerecedaAún no hay calificaciones
- Castillo Perez Veronica SecuenciaDocumento107 páginasCastillo Perez Veronica SecuenciaJaime Eduardo Remuzgo RuizAún no hay calificaciones
- EVALUACIÓN DEL SEGUNDO PERÍODO FisicaDocumento6 páginasEVALUACIÓN DEL SEGUNDO PERÍODO FisicaNelly CastroAún no hay calificaciones
- Costos Ii Plan de TrabajoDocumento15 páginasCostos Ii Plan de TrabajoYemz RayónAún no hay calificaciones
- Valor Del Dinero en El Tiempo - Interés Simple y CompuestoDocumento4 páginasValor Del Dinero en El Tiempo - Interés Simple y CompuestoBerry OhAún no hay calificaciones
- Tipos de ImpresorasDocumento9 páginasTipos de ImpresorasافىميراندAún no hay calificaciones
- Muñoz - Gestión de Proyectos - S14Documento16 páginasMuñoz - Gestión de Proyectos - S14Yanina Yahayra Almeyda SaraviaAún no hay calificaciones
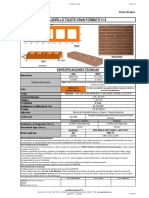
- P - 36 - FT LTGF11 5Documento1 páginaP - 36 - FT LTGF11 5Helmer Yecid Roncancio RoperoAún no hay calificaciones
- Espectrofotometria UVDocumento64 páginasEspectrofotometria UVAlex F. Perdomo0% (1)
- Comunicacion LedesmaDocumento19 páginasComunicacion Ledesmamaria candelaria tito100% (5)
- Causas Básicas y Causas InmediatasDocumento17 páginasCausas Básicas y Causas InmediatasLiuAún no hay calificaciones
- Cuadro Concentrador - Crecimiento y Desarrollo EconómicoDocumento6 páginasCuadro Concentrador - Crecimiento y Desarrollo EconómicoDañe CabreraAún no hay calificaciones
- Práctica Comprensión LectoraDocumento6 páginasPráctica Comprensión LectoraAngie Nolasco ChavezAún no hay calificaciones
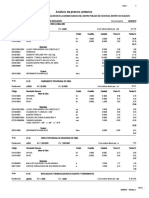
- Costos UnitariosDocumento33 páginasCostos UnitariosmilenaAún no hay calificaciones
- Actividades Textos Los Milesios 2010Documento3 páginasActividades Textos Los Milesios 2010Paco Rojas RodríguezAún no hay calificaciones
- Plan de Área Inglés Grado 8°Documento1 páginaPlan de Área Inglés Grado 8°Diana Alejandra Sanchez PeraltaAún no hay calificaciones
- 8.0.1.2 Class Activity - Can Submarines Swim InstructionsDocumento3 páginas8.0.1.2 Class Activity - Can Submarines Swim InstructionsJonathan Carvajal GarcíaAún no hay calificaciones
- Report Mar-Ago 2021 Barbieri Do Brasil ESPDocumento25 páginasReport Mar-Ago 2021 Barbieri Do Brasil ESPJesús Reynaldo Vigabriel ParedesAún no hay calificaciones
- SemiconductoresDocumento7 páginasSemiconductoresJorge ReyesAún no hay calificaciones
- Entre Conciertos y Des-Conciertos El Juego Como Acto PolíticoDocumento21 páginasEntre Conciertos y Des-Conciertos El Juego Como Acto PolíticoLucía Fernández CívicoAún no hay calificaciones