También podría gustarte
- 01 - Galactic Burn - Mel TeshcoDocumento145 páginas01 - Galactic Burn - Mel TeshcoAMMHAún no hay calificaciones
- Análisis Inferencial-Tesis IDocumento13 páginasAnálisis Inferencial-Tesis IscribdleonpepeAún no hay calificaciones
- 4 Dispositivos IntegradosDocumento23 páginas4 Dispositivos Integradoscchristt2584Aún no hay calificaciones
- Tema 02Documento46 páginasTema 02andres limaAún no hay calificaciones
- Lab 10 Método de CurvaDocumento11 páginasLab 10 Método de CurvaJo CaballeroAún no hay calificaciones
- Características de Los ProcesosDocumento35 páginasCaracterísticas de Los ProcesosManuel Barreto VelasquezAún no hay calificaciones
- Lab3-Sintonía de Un Controlador PID Metodo Del TanteoDocumento7 páginasLab3-Sintonía de Un Controlador PID Metodo Del TanteoCandy Paredes Padilla0% (1)
- Copia de Trabajo Individual N1Documento5 páginasCopia de Trabajo Individual N1rodrigo.solorzanoAún no hay calificaciones
- Lab06-Modos de Control PI y PIDDocumento25 páginasLab06-Modos de Control PI y PIDBryan Shamir Gutierrez MoyaAún no hay calificaciones
- Informe 06 PotenciaDocumento14 páginasInforme 06 PotenciaJean Cc100% (1)
- Lab 03 - Enlace Entre Un PLC y Un HMIDocumento16 páginasLab 03 - Enlace Entre Un PLC y Un HMIRodrigo Cabrera EspinozaAún no hay calificaciones
- Analisis Del Cuento de Ushanan Jampi. 11111Documento20 páginasAnalisis Del Cuento de Ushanan Jampi. 11111Anthony Orellano71% (7)
- Lab04 - Rectificador Trifasico No ControladoDocumento33 páginasLab04 - Rectificador Trifasico No ControladoWilly Luque BautistaAún no hay calificaciones
- Reporte LAB12Documento5 páginasReporte LAB12Scryd AleysterAún no hay calificaciones
- 2 ControladoresDocumento69 páginas2 ControladoresEsteban BenitesAún no hay calificaciones
- Ejercicios Resueltos en Diagramas NSDocumento20 páginasEjercicios Resueltos en Diagramas NSALEX86% (7)
- SEM 14 - 04 - CASO EJEMPLO MISTURA - Plan Gestión Alcance Tiempo y RequisitosDocumento11 páginasSEM 14 - 04 - CASO EJEMPLO MISTURA - Plan Gestión Alcance Tiempo y RequisitosDaniel RomeroAún no hay calificaciones
- 01 Control CascadaDocumento24 páginas01 Control Cascadaluisfiis1Aún no hay calificaciones
- Controlador PID Con PLCDocumento5 páginasControlador PID Con PLCNestor Eduardo Polania VargasAún no hay calificaciones
- Control Regulatorio PIDDocumento43 páginasControl Regulatorio PIDAntHony K-ianAún no hay calificaciones
- Lab 9 Sintonizacion PID Con Curva de Reacción y MatlabDocumento15 páginasLab 9 Sintonizacion PID Con Curva de Reacción y Matlabccesar1990Aún no hay calificaciones
- Control PidDocumento20 páginasControl PidJordanG.NoriegaAún no hay calificaciones
- Laboratorio N°7 Control en CascadaDocumento15 páginasLaboratorio N°7 Control en CascadaYanira ChambillaAún no hay calificaciones
- Sistemas Biologicos PDFDocumento5 páginasSistemas Biologicos PDFluisroloncg0% (1)
- Admon Financiera #4Documento9 páginasAdmon Financiera #4Erick Orlando100% (2)
- Clase 1 Estrategias Control Automatico 2017 - 2Documento31 páginasClase 1 Estrategias Control Automatico 2017 - 2Leonidas Miano0% (1)
- Control de Procesos - Lab 12Documento18 páginasControl de Procesos - Lab 12Elvis GarciaAún no hay calificaciones
- Control Onoff PidDocumento40 páginasControl Onoff PidJose Francisco CamachoAún no hay calificaciones
- Arq Bio PDFDocumento163 páginasArq Bio PDFEzequielAún no hay calificaciones
- Lab 6Documento10 páginasLab 6Yosilin Domínguez ArellanoAún no hay calificaciones
- Guia de Laboratorio - Sintonia Del Controlador - Procesos y ControlDocumento15 páginasGuia de Laboratorio - Sintonia Del Controlador - Procesos y ControlJose Luiz Martel CltsAún no hay calificaciones
- Lab 08 Sintonia Método HeurísticoDocumento11 páginasLab 08 Sintonia Método HeurísticoJeffry Cr PaJar PonCe100% (1)
- Lab09 Sintonia M+®todo Heur+¡stico-1Documento11 páginasLab09 Sintonia M+®todo Heur+¡stico-1Alternador AlternadoAún no hay calificaciones
- Lab11 - Modo de Control PIDDocumento10 páginasLab11 - Modo de Control PIDFreddy ZuñigaAún no hay calificaciones
- Lab06-Modos de Control PI y PIDDocumento9 páginasLab06-Modos de Control PI y PIDHenry ValenciaAún no hay calificaciones
- Informe 9Documento12 páginasInforme 9AlwinAún no hay calificaciones
- Sistemas Industriales Complejos "Curva Característica": InformeDocumento17 páginasSistemas Industriales Complejos "Curva Característica": InformeJose Luis Condori PintoAún no hay calificaciones
- Informe 9Documento12 páginasInforme 9Mauricio Emilio Arotingo Reyes100% (1)
- Sesión 05 Modos de Control Rev PDFDocumento32 páginasSesión 05 Modos de Control Rev PDFUlfer FloresAún no hay calificaciones
- Sintonia CompletaDocumento14 páginasSintonia CompletaAngie Morales MorenoAún no hay calificaciones
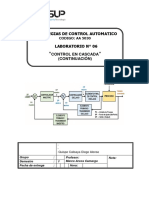
- Laboratorio N°6 Control en Cascada (Continuación)Documento16 páginasLaboratorio N°6 Control en Cascada (Continuación)Erick Contreras QuispeAún no hay calificaciones
- Sintonía Por El Método Del TanteoDocumento12 páginasSintonía Por El Método Del TanteoMauricio ARAún no hay calificaciones
- Lab 02 ModBus 2018Documento23 páginasLab 02 ModBus 2018Joelcito Pillco AlarconAún no hay calificaciones
- Lab 02 Caracteristicas de Los Procesos 2020 - 2Documento6 páginasLab 02 Caracteristicas de Los Procesos 2020 - 2Antony Perez SoveroAún no hay calificaciones
- Laboratorio N6 Control en Cascada Continuacion.111111111Documento15 páginasLaboratorio N6 Control en Cascada Continuacion.111111111Joseph CanalesAún no hay calificaciones
- Inform Lab 14Documento16 páginasInform Lab 14Cesar CuadrosAún no hay calificaciones
- Laboratorio N°6 Control en Cascada PARTE 5Documento17 páginasLaboratorio N°6 Control en Cascada PARTE 5Erick Contreras QuispeAún no hay calificaciones
- Lab06 - Control de Fase - Motor DCDocumento39 páginasLab06 - Control de Fase - Motor DCjeimy.carrilloAún no hay calificaciones
- Guía de Implementación v3.0 - Control de Variadores Altivar en Modbus RTU Con SoMachineDocumento33 páginasGuía de Implementación v3.0 - Control de Variadores Altivar en Modbus RTU Con SoMachineAldo PeñaAún no hay calificaciones
- Laboratorio N6 Control en Cascada Continuacion.111111111Documento24 páginasLaboratorio N6 Control en Cascada Continuacion.111111111Jose HuamaniAún no hay calificaciones
- Lab 7 Estrategias de Control Tieno MillerDocumento12 páginasLab 7 Estrategias de Control Tieno MillerMiller Tineo PerezAún no hay calificaciones
- Lab 9 ProcesosDocumento13 páginasLab 9 ProcesosVagnert Alva RojasAún no hay calificaciones
- Lab Control 3Documento38 páginasLab Control 3Wilar Humpiri Turpo100% (1)
- Control de RazonDocumento18 páginasControl de RazonHoly ZentsukiAún no hay calificaciones
- Laboratorio N6 Falta CHIPANADocumento26 páginasLaboratorio N6 Falta CHIPANAAlonso CMAún no hay calificaciones
- Lab10 Sintonia Método Curva de ReacciónDocumento9 páginasLab10 Sintonia Método Curva de Reaccióndeded deAún no hay calificaciones
- Control Prealimentado (Feedforward)Documento17 páginasControl Prealimentado (Feedforward)ALBERTO ROSELLO ALVAREZAún no hay calificaciones
- Sesión 10 Sintonia Por Curva de Reacción PDFDocumento39 páginasSesión 10 Sintonia Por Curva de Reacción PDFIlder Juan Ticona MamaniAún no hay calificaciones
- Laboratorio N°4 Lugar de Raices y Diagranas de BodeDocumento10 páginasLaboratorio N°4 Lugar de Raices y Diagranas de BodegustavoAún no hay calificaciones
- Laboratorio N°1 Introducción Al Matlab - Simulink - 2021 - 1Documento24 páginasLaboratorio N°1 Introducción Al Matlab - Simulink - 2021 - 1Cristhian Efrain Mamani BlancoAún no hay calificaciones
- LAB8 - Control On OffDocumento26 páginasLAB8 - Control On OffAnthony Rodrigo CuevaAún no hay calificaciones
- SIMATIC TemporizadoresDocumento17 páginasSIMATIC TemporizadoresFrank Ruiz MitteennAún no hay calificaciones
- Control PIDDocumento12 páginasControl PIDjoeAún no hay calificaciones
- Laboratorio N°8Documento17 páginasLaboratorio N°8Alex ChuctayaAún no hay calificaciones
- LAB 07 - Electrónica de PotenciaDocumento23 páginasLAB 07 - Electrónica de PotenciaChristian FernandoAún no hay calificaciones
- Configuración y Ajuste de Un RegistradorDocumento27 páginasConfiguración y Ajuste de Un RegistradorFeedy LopezAún no hay calificaciones
- Modo Proporcional IntegrativoDocumento11 páginasModo Proporcional IntegrativoHumberto PachecoAún no hay calificaciones
- Guia Laboratorio 0-3Documento20 páginasGuia Laboratorio 0-3José QuispeAún no hay calificaciones
- Es Acs150 Qisg C A3Documento2 páginasEs Acs150 Qisg C A3Joel UtpAún no hay calificaciones
- Temario P e Gestion de Redes SocialesDocumento13 páginasTemario P e Gestion de Redes SocialesJoel UtpAún no hay calificaciones
- III. Ejercicio Clase #3 - Tema IIIDocumento4 páginasIII. Ejercicio Clase #3 - Tema IIIJoel UtpAún no hay calificaciones
- Reglas de Sintonizacion de Controladores PidDocumento6 páginasReglas de Sintonizacion de Controladores PidJoel UtpAún no hay calificaciones
- Proa - 1 Año - Primer CapituloDocumento13 páginasProa - 1 Año - Primer CapituloShirley Daiana CecconAún no hay calificaciones
- Aranceles Smie 2020Documento229 páginasAranceles Smie 2020Yatniel BjAún no hay calificaciones
- Región Sur BrasilDocumento12 páginasRegión Sur BrasilJuan Pablo LoperaAún no hay calificaciones
- Analisis de Gracias A La VidaDocumento9 páginasAnalisis de Gracias A La VidaPadilla MuñozAún no hay calificaciones
- Manual de Capacitación para Manipuladores de Alimentos PDFDocumento45 páginasManual de Capacitación para Manipuladores de Alimentos PDFCarolina BohorquezAún no hay calificaciones
- El JuegoDocumento2 páginasEl JuegoMarcoAún no hay calificaciones
- Raz. Matematico 5º I 2007Documento72 páginasRaz. Matematico 5º I 2007Roy J. TaypeAún no hay calificaciones
- Estetica de Laboratorio-ApuntesDocumento6 páginasEstetica de Laboratorio-ApuntesVeroni-k AguirreAún no hay calificaciones
- Autocontrol - KendalDocumento4 páginasAutocontrol - KendalGuiliana ValdiviesoAún no hay calificaciones
- Ensayo de Actividades Antropogenicas MALR 301 MPDocumento3 páginasEnsayo de Actividades Antropogenicas MALR 301 MPMiguel Andrés López RangelAún no hay calificaciones
- La Ensenanza EfectivaDocumento29 páginasLa Ensenanza EfectivaRene Oscar Duhalde SantanaAún no hay calificaciones
- Aplicacion Informaticas Practica 4Documento4 páginasAplicacion Informaticas Practica 4GinaOnofreOrtegaAún no hay calificaciones
- Cuestionario Capítulo 1Documento1 páginaCuestionario Capítulo 1joevel22Aún no hay calificaciones
- Dificultades de Aprendizaje en La Infancia Un Enfoque CognitivoDocumento3 páginasDificultades de Aprendizaje en La Infancia Un Enfoque CognitivomontseAún no hay calificaciones
- Adminis Del Cambio Foro 3 Sema 6Documento3 páginasAdminis Del Cambio Foro 3 Sema 6SANDRA MILENA ACOSTA VALLEJO100% (1)
- Planeación 3 Negro MARZODocumento72 páginasPlaneación 3 Negro MARZOremcreepsAún no hay calificaciones
- Aritmetica 2015 1 ParteDocumento82 páginasAritmetica 2015 1 ParteJohnnyMeca0% (1)
- Escalas Evaluacion Desarrollo InteligenciaDocumento12 páginasEscalas Evaluacion Desarrollo InteligenciaGODISNOWHEREAún no hay calificaciones
- Malla de Ingles 6º A 11ºDocumento84 páginasMalla de Ingles 6º A 11ºJuan Montalvo CaraballoAún no hay calificaciones
- Dibal Series KDocumento74 páginasDibal Series Kjesvarah100% (1)
- Examen Parcial 2022 I - SM - JB Ugarte eDocumento4 páginasExamen Parcial 2022 I - SM - JB Ugarte eAnthony BartoloAún no hay calificaciones
- Actividad Evaluativa Eje 3 Gestión Por CompetenciasDocumento9 páginasActividad Evaluativa Eje 3 Gestión Por CompetenciasRoger Arevalo MatizAún no hay calificaciones