También podría gustarte
- Actividad Evaluativa Eje 4Documento10 páginasActividad Evaluativa Eje 4Jesus DavidAún no hay calificaciones
- Actividad Evaluativa Eje4 Ecuaciones DiferencialesDocumento19 páginasActividad Evaluativa Eje4 Ecuaciones DiferencialesGeidy Tatiana Colorado DiazAún no hay calificaciones
- Ecuaciones Diferenciales Eje 4Documento14 páginasEcuaciones Diferenciales Eje 4John Jairo Lasso MeloAún no hay calificaciones
- Ecuaciones Diferenciales Eje 4Documento13 páginasEcuaciones Diferenciales Eje 4Fabián RamirezAún no hay calificaciones
- Ecuaciones Eje 3 Resuelto PDFDocumento9 páginasEcuaciones Eje 3 Resuelto PDFNicolasVargasJimenezAún no hay calificaciones
- Eje 3 Fisica IiDocumento11 páginasEje 3 Fisica IiJeisson Augusto Aragones OrjuelaAún no hay calificaciones
- Aprendiendo Sobre Potencial y Energía EléctricaDocumento14 páginasAprendiendo Sobre Potencial y Energía Eléctricalaura alvarezAún no hay calificaciones
- Actividad Evaluativa Eje 2 Ecuaciones DiferencialesDocumento11 páginasActividad Evaluativa Eje 2 Ecuaciones Diferencialesluisa mayeny fernandez florezAún no hay calificaciones
- Actividad Evaluativa Eje 3 CircuitosDocumento8 páginasActividad Evaluativa Eje 3 CircuitosBrayan BenavidesAún no hay calificaciones
- Ecuaciones Diferenciales EJE 3 - Oscar DiazDocumento9 páginasEcuaciones Diferenciales EJE 3 - Oscar DiazOzkar Dia'zAún no hay calificaciones
- Aplicaciones de Las Ecuaciones Diferenciales Eje 2Documento32 páginasAplicaciones de Las Ecuaciones Diferenciales Eje 2Carlos VillegasAún no hay calificaciones
- Actividad Eje 3 Circuitos EléctricosDocumento4 páginasActividad Eje 3 Circuitos EléctricosCarlos Julio Santos BarbosaAún no hay calificaciones
- Actividad Evaluativa Eje 2 ED.Documento11 páginasActividad Evaluativa Eje 2 ED.carolina BarajasAún no hay calificaciones
- Eje IV Analisis NumericoDocumento2 páginasEje IV Analisis NumericoJesus Martinez MejiaAún no hay calificaciones
- Ecuaciones Diferenciales Actividad Eje 2Documento11 páginasEcuaciones Diferenciales Actividad Eje 2Sandra Gómez TovarAún no hay calificaciones
- Actividad Evaluativa Eje 2 Ecuaciones DiferencialesDocumento11 páginasActividad Evaluativa Eje 2 Ecuaciones DiferencialesEDGAR LEONARDO VELANDIA GARCIAAún no hay calificaciones
- Cálculo Diferencial Tarea Eje 3 Mayo 13-2Documento3 páginasCálculo Diferencial Tarea Eje 3 Mayo 13-2Leon StevenAún no hay calificaciones
- Actividad Eje 4, Calculo 1.1 FinalDocumento15 páginasActividad Eje 4, Calculo 1.1 Finalanon_810401158Aún no hay calificaciones
- Eje 3 Actividad GrupalDocumento2 páginasEje 3 Actividad GrupalCarlos Rodriguez Casallas100% (1)
- Eje 3 Actividad GrupalDocumento1 páginaEje 3 Actividad Grupalaleja24ifyAún no hay calificaciones
- Actividad Evaluativa Del Eje2 Investigacion de OperacionesDocumento10 páginasActividad Evaluativa Del Eje2 Investigacion de OperacionesLiliana VarelaAún no hay calificaciones
- ExamenDocumento6 páginasExamenpedro gilAún no hay calificaciones
- Actividad Evaluativa Eje 1 (P1) - FISICA II - IS - 2020 - 06 - 08 - 071-3 PDFDocumento11 páginasActividad Evaluativa Eje 1 (P1) - FISICA II - IS - 2020 - 06 - 08 - 071-3 PDFJavier Stenches RepulsiveAún no hay calificaciones
- Actividad Evaluativa Eje 4Documento3 páginasActividad Evaluativa Eje 4Sebastian Soto0% (1)
- Eje 3Documento13 páginasEje 3juan camilo puerto gonzalezAún no hay calificaciones
- Ecuaciones Diferenciales EJE 3 Carlos Alberto Villegas SanchezDocumento8 páginasEcuaciones Diferenciales EJE 3 Carlos Alberto Villegas SanchezCarlos VillegasAún no hay calificaciones
- Ecuaciones Diferenciales Taller Eje 2-1Documento3 páginasEcuaciones Diferenciales Taller Eje 2-1jhon hernandezAún no hay calificaciones
- Solucion Eje 4Documento16 páginasSolucion Eje 4Juan José Ortiz ParraAún no hay calificaciones
- Actividad Evaluativa Eje 1 - Calculo Diferencial - 202210-1a - 13Documento12 páginasActividad Evaluativa Eje 1 - Calculo Diferencial - 202210-1a - 13Lion MegaproteinAún no hay calificaciones
- Eje 2 Foro de Debate EcuacionesDocumento6 páginasEje 2 Foro de Debate EcuacionesSergio Andres Ramirez AcostaAún no hay calificaciones
- Actividad Evaluativa Eje 4 Ecuaciones DiferencialesDocumento19 páginasActividad Evaluativa Eje 4 Ecuaciones DiferencialesDesconocidoAún no hay calificaciones
- Actividad Evaluativa Eje II Estadistica y ProbabilidadDocumento19 páginasActividad Evaluativa Eje II Estadistica y ProbabilidadJefferson Harvey Marquez NiñoAún no hay calificaciones
- Ecuaciones Diferenciales - Eje - 3Documento9 páginasEcuaciones Diferenciales - Eje - 3Angie SaavedraAún no hay calificaciones
- EJE 2 Calculo DiferencialDocumento16 páginasEJE 2 Calculo DiferencialAndres100% (1)
- Activ Eje 1 - Ecuaciones DiferDocumento13 páginasActiv Eje 1 - Ecuaciones DiferJulian Alberto Prado SanchezAún no hay calificaciones
- Ecuaciones Diferenciales Eje2Documento7 páginasEcuaciones Diferenciales Eje2jhon hernandezAún no hay calificaciones
- Actividad Evaluativa Eje 2. Ecuaciones DiferencialesDocumento18 páginasActividad Evaluativa Eje 2. Ecuaciones DiferencialesFabián Enrique Bolaños GarcíaAún no hay calificaciones
- Solucion Del Eje2Documento13 páginasSolucion Del Eje2jhonattan lopezAún no hay calificaciones
- Actividad Evaluativa Eje 2 FisicaDocumento17 páginasActividad Evaluativa Eje 2 FisicaSebastian OrtizAún no hay calificaciones
- Actividad Evaluativa EJE 2 Ecuaciones DiferencialesDocumento12 páginasActividad Evaluativa EJE 2 Ecuaciones DiferencialesVelandia LeonardoAún no hay calificaciones
- Actividad Evaluativa Eje 1 - Calculo Diferencial - 202110-1a - 014Documento18 páginasActividad Evaluativa Eje 1 - Calculo Diferencial - 202110-1a - 014Carlos MartinezAún no hay calificaciones
- TAREA EJE 4 - Calculo-SERIES Y SUCESIONES E INTEGRALES MULTIPLESDocumento9 páginasTAREA EJE 4 - Calculo-SERIES Y SUCESIONES E INTEGRALES MULTIPLESYïNå Sånå100% (1)
- Taller EJE 4 Calculo DiferencialDocumento14 páginasTaller EJE 4 Calculo DiferencialjesusAún no hay calificaciones
- Eje 4 Calculo Multivariado Actividad Evaluativa Eje CuatroDocumento7 páginasEje 4 Calculo Multivariado Actividad Evaluativa Eje CuatroAdriana Maria Parga PovedaAún no hay calificaciones
- Actividad Evaluativa Eje 1 ECUACIONES DIFERENCIALES - 202110-1A - 012Documento15 páginasActividad Evaluativa Eje 1 ECUACIONES DIFERENCIALES - 202110-1A - 012Geidy Tatiana Colorado DiazAún no hay calificaciones
- Actividad Eje 3 - Cálculo Area AndinaDocumento11 páginasActividad Eje 3 - Cálculo Area AndinaKaren Mendivelso RamirezAún no hay calificaciones
- Algebra Lineal Eje 3Documento12 páginasAlgebra Lineal Eje 3AndresAún no hay calificaciones
- Cálculo Eje 3Documento9 páginasCálculo Eje 3Jorge Luis Sanchez ChavezAún no hay calificaciones
- Taller Eje 3 - Calculo Integral8216 - Diego Felipe Tovar SanchezDocumento11 páginasTaller Eje 3 - Calculo Integral8216 - Diego Felipe Tovar SanchezDiego TovarAún no hay calificaciones
- Eje 2 Investigacion Operacional IDocumento4 páginasEje 2 Investigacion Operacional IJeisson Augusto Aragones OrjuelaAún no hay calificaciones
- Estadistica y Probabilidad - Eje 2 - AreandinaDocumento19 páginasEstadistica y Probabilidad - Eje 2 - AreandinaJuanAún no hay calificaciones
- Trabajo Fisica-Eje 2Documento14 páginasTrabajo Fisica-Eje 2brandon hernandezAún no hay calificaciones
- ACTIVIDAD EVALUATIVA EJE 1 - Producción (Michael Sáenz)Documento6 páginasACTIVIDAD EVALUATIVA EJE 1 - Producción (Michael Sáenz)Laura FarfanAún no hay calificaciones
- Criptosistemas SegurosDocumento16 páginasCriptosistemas SegurosJuan Andrés PachecoAún no hay calificaciones
- Taller Eje 3 Ing Estadistica y Probabilidad PDFDocumento7 páginasTaller Eje 3 Ing Estadistica y Probabilidad PDFCristian CortesAún no hay calificaciones
- Actividad Evaluativa 3 - Historia y Problemas de ColombiaDocumento18 páginasActividad Evaluativa 3 - Historia y Problemas de ColombiaJeison Patino CamargoAún no hay calificaciones
- Actividad Evaluativa Eje 4 Ecuaciones DiferencialesDocumento8 páginasActividad Evaluativa Eje 4 Ecuaciones DiferencialesJuan Camilo lara rojasAún no hay calificaciones
- Ejercicios 2Documento6 páginasEjercicios 2Sergio BCAún no hay calificaciones
- Ecuacion - Diferenciales - EJE 4-1Documento10 páginasEcuacion - Diferenciales - EJE 4-1Nancy del carmen Davila BurbanoAún no hay calificaciones
- Solución Actividad Evaluativa Eje 4 - Ecuaciones DiferencialesDocumento8 páginasSolución Actividad Evaluativa Eje 4 - Ecuaciones Diferencialesfredy diazAún no hay calificaciones
- Taller Eje 2 TGSDocumento11 páginasTaller Eje 2 TGSJoseLuisRubianoAún no hay calificaciones
- 244 Eje4 t1Documento10 páginas244 Eje4 t1JoseLuisRubianoAún no hay calificaciones
- Esquema MVC Sistema FirmesDocumento13 páginasEsquema MVC Sistema FirmesJoseLuisRubianoAún no hay calificaciones
- Uleam Infor 0044Documento94 páginasUleam Infor 0044JoseLuisRubianoAún no hay calificaciones
- TareaDocumento2 páginasTareaJoseLuisRubianoAún no hay calificaciones
- Actividad Evaluativa Eje 4 - SGSIDocumento14 páginasActividad Evaluativa Eje 4 - SGSIJoseLuisRubiano0% (1)
- Actividad Evaluativa Eje 3 - Informatica ForenseDocumento13 páginasActividad Evaluativa Eje 3 - Informatica ForenseJoseLuisRubiano100% (1)
- Actividad Evaluativa Eje 1 - Informatica ForenseDocumento6 páginasActividad Evaluativa Eje 1 - Informatica ForenseJoseLuisRubianoAún no hay calificaciones
- Actividad Evaluativa Eje 4 - Seguridad en RedesDocumento16 páginasActividad Evaluativa Eje 4 - Seguridad en RedesJoseLuisRubiano100% (3)
- Tallejer Eje 2 ForenseDocumento16 páginasTallejer Eje 2 ForenseJoseLuisRubianoAún no hay calificaciones
- Actividad Evaluativa Eje 4 - TGSDocumento4 páginasActividad Evaluativa Eje 4 - TGSJoseLuisRubianoAún no hay calificaciones
- 4.cerradura Manija Ev60 G2 D-InoxDocumento1 página4.cerradura Manija Ev60 G2 D-InoxEscobar ProduccionesAún no hay calificaciones
- CATEDRA 8 - Mecanismos de Fortalecimiento de Los MaterialesDocumento47 páginasCATEDRA 8 - Mecanismos de Fortalecimiento de Los MaterialesteodoroAún no hay calificaciones
- Metodología BIMDocumento4 páginasMetodología BIMrudyAún no hay calificaciones
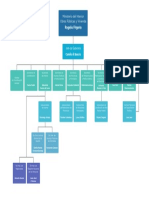
- Organigrama Ministerio Del Interior 1 - ARGENTINADocumento1 páginaOrganigrama Ministerio Del Interior 1 - ARGENTINAdaniel muñozAún no hay calificaciones
- Plan de NegocioDocumento13 páginasPlan de NegocioJaime Pelaez100% (1)
- Foro 2Documento2 páginasForo 2Mariela MeloAún no hay calificaciones
- Sílabo Comunicación.Documento9 páginasSílabo Comunicación.DamianaAún no hay calificaciones
- Musica A Finales Del XIX y Principios Del XXDocumento3 páginasMusica A Finales Del XIX y Principios Del XXasdfghjklkjhgfdsAún no hay calificaciones
- Ensayo de La Pelicula de Ana FrankDocumento4 páginasEnsayo de La Pelicula de Ana Frankalejandra rosalesAún no hay calificaciones
- Tema 13 Conceptos Basicos Do CteDocumento4 páginasTema 13 Conceptos Basicos Do CteRocio Hermida MiserAún no hay calificaciones
- Temas SeleccionadosDocumento45 páginasTemas Seleccionadosherranarte100% (1)
- PRACTICA - Unidad 2. Software de Simulación-V2Documento9 páginasPRACTICA - Unidad 2. Software de Simulación-V2Jonathan Pompeyo RamirezAún no hay calificaciones
- S5 - 4.plantilla de Comentario de HidrogramaDocumento14 páginasS5 - 4.plantilla de Comentario de HidrogramaAzuAún no hay calificaciones
- Hace Mucho TiempoDocumento2 páginasHace Mucho TiempoMaria Ignacia Van De Wyngard GillmoreAún no hay calificaciones
- Probelmas Ambientales LambayequeDocumento9 páginasProbelmas Ambientales Lambayequewaldo ruben100% (1)
- Proceso de Fabricacion de ZapatosDocumento7 páginasProceso de Fabricacion de ZapatosFabian PullopaxiAún no hay calificaciones
- The Death Mage That Doesn 6Documento389 páginasThe Death Mage That Doesn 6JuanAún no hay calificaciones
- Taller Incoterms PDFDocumento2 páginasTaller Incoterms PDFSandra BerdugoAún no hay calificaciones
- Parasitosis IntestinalesDocumento24 páginasParasitosis IntestinalesFrancisco ChalenAún no hay calificaciones
- Reporte U4 Control de MotoresDocumento9 páginasReporte U4 Control de MotoresKáros VerheerendAún no hay calificaciones
- AGUSTÍN HernandezDocumento55 páginasAGUSTÍN HernandezAndo Cano0% (1)
- Informe 3 Plan de Trabajo AdolescenteDocumento10 páginasInforme 3 Plan de Trabajo AdolescentelissethAún no hay calificaciones
- Cultura MocheDocumento54 páginasCultura MocheMilnert Vp100% (1)
- Kera PoxyDocumento6 páginasKera PoxyEstuco AndinoAún no hay calificaciones
- Deficiencia de Vitamina B12 Como Etiología de Deterioro Cognitivo y DemenciaDocumento15 páginasDeficiencia de Vitamina B12 Como Etiología de Deterioro Cognitivo y DemenciaEricka FelizAún no hay calificaciones
- ¿Qué Es El Método DELPHI y Cómo Se AplicaDocumento9 páginas¿Qué Es El Método DELPHI y Cómo Se AplicaCESAR/RIJO CRISTIAN RAFAEL100% (1)
- Programa Analitico 1 Calidad Ambiental IDocumento16 páginasPrograma Analitico 1 Calidad Ambiental Ifocos2005Aún no hay calificaciones
- Tesis Maestria Carmen Karina Palomino ReymundoDocumento33 páginasTesis Maestria Carmen Karina Palomino ReymundoDeirita Barrios ChaparroAún no hay calificaciones
- Guia - 7 - Estructuración de Planes de NegociosDocumento42 páginasGuia - 7 - Estructuración de Planes de NegociosSebastian Vega HernandezAún no hay calificaciones
- Cultivo de PaltoDocumento6 páginasCultivo de PaltoYasminia YassAún no hay calificaciones