También podría gustarte
- 1°medio Evaluacion Productos NotablesDocumento2 páginas1°medio Evaluacion Productos NotablesMonica Ximena Mansilla Ruiz100% (1)
- Diseño de Estructuras Metálicas (MODULO 2 Sección 2.1)Documento34 páginasDiseño de Estructuras Metálicas (MODULO 2 Sección 2.1)Frandy Vargas AbreuAún no hay calificaciones
- Ejercicios Suma Resta de FraccionesDocumento12 páginasEjercicios Suma Resta de FraccionesVictor Corona0% (1)
- Linea Del Tiempo de La Teoria AtomicaDocumento2 páginasLinea Del Tiempo de La Teoria AtomicaMadrid Silva Victor Joshua 1IM11Aún no hay calificaciones
- FRET00 - Mejoras Riesgo Parte 1Documento6 páginasFRET00 - Mejoras Riesgo Parte 1cristian garciaAún no hay calificaciones
- RQ1-Nuevo Formato - Niveles DocumentaciónDocumento7 páginasRQ1-Nuevo Formato - Niveles Documentacióncristian garciaAún no hay calificaciones
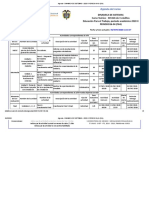
- Agenda - DINAMICA DE SISTEMAS - 2020 II PERIODO16-04 PDFDocumento2 páginasAgenda - DINAMICA DE SISTEMAS - 2020 II PERIODO16-04 PDFMayra TovarAún no hay calificaciones
- F 7 2 1Documento2 páginasF 7 2 1Pedro DominguezAún no hay calificaciones
- FilenameDocumento1 páginaFilenamecristian garciaAún no hay calificaciones
- DescargaDocumento3 páginasDescargacristian garciaAún no hay calificaciones
- FRET00 - Mejoras Riesgo Parte 2Documento15 páginasFRET00 - Mejoras Riesgo Parte 2cristian garciaAún no hay calificaciones
- F 7 2 1Documento2 páginasF 7 2 1Pedro DominguezAún no hay calificaciones
- Definición Variables Parametros AdrianaDocumento6 páginasDefinición Variables Parametros Adrianacristian garciaAún no hay calificaciones
- F 7 2 1Documento2 páginasF 7 2 1Pedro DominguezAún no hay calificaciones
- Diseño OVI - Laura HernándezDocumento9 páginasDiseño OVI - Laura Hernándezcristian garciaAún no hay calificaciones
- Asegúrese de Consultar La Versión Vigente de Este Formato enDocumento17 páginasAsegúrese de Consultar La Versión Vigente de Este Formato encristian garciaAún no hay calificaciones
- Eac 06316Documento14 páginasEac 06316MirkoMontecinosCortezAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación Fase 2 Realizar Diagnóstico de Necesidades de AprendizajeDocumento10 páginasGuía de Actividades y Rúbrica de Evaluación Fase 2 Realizar Diagnóstico de Necesidades de AprendizajefrancyAún no hay calificaciones
- Anexo 1-Plantilla - Entrega - Tarea 1Documento33 páginasAnexo 1-Plantilla - Entrega - Tarea 1cristian garciaAún no hay calificaciones
- Formato de Autoevaluación y CoevaluaciónDocumento3 páginasFormato de Autoevaluación y Coevaluacióncristian garciaAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación Fase 6Documento10 páginasGuía de Actividades y Rúbrica de Evaluación Fase 6cristian garciaAún no hay calificaciones
- Tarifas GasDocumento3 páginasTarifas Gascristian garciaAún no hay calificaciones
- Las Matrices HomogeneasDocumento30 páginasLas Matrices HomogeneasRossell Villarroel BayaAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación Fase 4 Ejecutar Un Plan para Solucionar El Problema PlanteadoDocumento10 páginasGuía de Actividades y Rúbrica de Evaluación Fase 4 Ejecutar Un Plan para Solucionar El Problema Planteadocristian garciaAún no hay calificaciones
- Voucher Jesus Adrian PDFDocumento1 páginaVoucher Jesus Adrian PDFcristian garciaAún no hay calificaciones
- Robots KUKA para Cargas Elevadas PDFDocumento36 páginasRobots KUKA para Cargas Elevadas PDFcristian garcia100% (1)
- Factura Barcode 201912041221Documento1 páginaFactura Barcode 201912041221cristian garciaAún no hay calificaciones
- Errores Facturación Igac AlcantarilladoDocumento3 páginasErrores Facturación Igac Alcantarilladocristian garciaAún no hay calificaciones
- Evaluación de Fundamentos de Economía Fase 1Documento6 páginasEvaluación de Fundamentos de Economía Fase 1cristian garciaAún no hay calificaciones
- Fase 4 - Trabajo Individual - Maria Alejandra QuicenoDocumento8 páginasFase 4 - Trabajo Individual - Maria Alejandra Quicenocristian garciaAún no hay calificaciones
- Guia de Actividades y Rúbrica de Evaluación - Fase 4 - Evaluación FinalDocumento7 páginasGuia de Actividades y Rúbrica de Evaluación - Fase 4 - Evaluación Finaldiego rodriguezAún no hay calificaciones
- APGU01Documento19 páginasAPGU01cristian garciaAún no hay calificaciones
- 10 Resonancia en Un Circuito RLC SerieDocumento10 páginas10 Resonancia en Un Circuito RLC SerieGERARDO ADRIAN PALACIOS CALDERONAún no hay calificaciones
- Informe TopograficoDocumento44 páginasInforme TopograficoAngel Cardenas YauriAún no hay calificaciones
- Formación Profesional Dual: Servicio Nacional de Adiestramiento en Trabajo IndustrialDocumento13 páginasFormación Profesional Dual: Servicio Nacional de Adiestramiento en Trabajo IndustrialJhoncito Huarac ValderramaAún no hay calificaciones
- Informe Sobre Aplicaciones de Ecuaciones DiferencialesDocumento10 páginasInforme Sobre Aplicaciones de Ecuaciones DiferencialesEmisario de los GorgonitasAún no hay calificaciones
- T01 - Resumen Orificios - Ximena Sánchez PDFDocumento8 páginasT01 - Resumen Orificios - Ximena Sánchez PDFXIMENA SANCHEZ ALVAREZAún no hay calificaciones
- Tarea DinámicaDocumento8 páginasTarea DinámicaAlejandro Triviño De La CruzAún no hay calificaciones
- Tabla 2.1 y Tabla 2.2Documento2 páginasTabla 2.1 y Tabla 2.2jc2113781Aún no hay calificaciones
- Tema 1.1 Conceptos Generales de La ComposicionDocumento10 páginasTema 1.1 Conceptos Generales de La ComposicionVICTOR SANTIAGO CANO MONTESAún no hay calificaciones
- Impulsores, NPSH, Cavit., Recirc.Documento35 páginasImpulsores, NPSH, Cavit., Recirc.Dan PardoAún no hay calificaciones
- Simulacro de Humedad Faa Roscardi FaduDocumento2 páginasSimulacro de Humedad Faa Roscardi FaduLarocha OMGAún no hay calificaciones
- Psm-Psa-2021-Discusion de Problemas 1a-BDocumento11 páginasPsm-Psa-2021-Discusion de Problemas 1a-BStefany Mariela Pineda AyalaAún no hay calificaciones
- Propiedades de La Suma y La MultiplicacionDocumento4 páginasPropiedades de La Suma y La MultiplicacionLiuskary UrayAún no hay calificaciones
- Matemáticas III Geometría Analítica 2da Edicion René JiménezDocumento205 páginasMatemáticas III Geometría Analítica 2da Edicion René JiménezJuan de Dios Martínez RodríguezAún no hay calificaciones
- Evidencia 2 - 1er ParcialDocumento1 páginaEvidencia 2 - 1er ParcialEric LopezAún no hay calificaciones
- Unidad 1. Unidades y VectoresDocumento33 páginasUnidad 1. Unidades y VectoresCharina Tejada40% (5)
- Catalogo LaserDocumento20 páginasCatalogo Laserjorjim8784Aún no hay calificaciones
- Informe de Aprendizaje YadielDocumento23 páginasInforme de Aprendizaje YadielcopyAún no hay calificaciones
- Hidraulica de Canales Unidad 4 Flujo Gradualmente VariadoDocumento30 páginasHidraulica de Canales Unidad 4 Flujo Gradualmente Variadoluishumbertocabreralopez1234Aún no hay calificaciones
- Tema 8 Metafisica I UnedDocumento7 páginasTema 8 Metafisica I UnedAlfAún no hay calificaciones
- BALISTICADocumento7 páginasBALISTICAyobi VillarroelAún no hay calificaciones
- Campos de Jacobi y Puntos ConjugadosDocumento19 páginasCampos de Jacobi y Puntos ConjugadosJerry jordan Marcheno RetuertoAún no hay calificaciones
- Trabajo de Campo n2Documento3 páginasTrabajo de Campo n2Fiorella R. CamposAún no hay calificaciones
- Losa de FundacionDocumento26 páginasLosa de FundacionACOSTAAún no hay calificaciones
- Tiempo de VaciadoDocumento4 páginasTiempo de VaciadoAnahli VasquezAún no hay calificaciones
- Aplicaciones Del Campo y Carga Eléctrica en La Vida DiariaDocumento16 páginasAplicaciones Del Campo y Carga Eléctrica en La Vida DiariaDarlin EspinosaAún no hay calificaciones
- Resumen de Fisica BiomedicaDocumento128 páginasResumen de Fisica BiomedicaNahuel ZarateAún no hay calificaciones
- Diapositiva C-H-C 1Documento13 páginasDiapositiva C-H-C 1Otilia QuinteroAún no hay calificaciones