También podría gustarte
- Montaje de instalaciones automatizadas. ELEE0109De EverandMontaje de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- Aporte RoboticaDocumento4 páginasAporte RoboticaonlyAún no hay calificaciones
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311De EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Calificación: 4.5 de 5 estrellas4.5/5 (2)
- Sensores y Actuadores de Los RobotsDocumento6 páginasSensores y Actuadores de Los RobotsObed Antonio SandovalAún no hay calificaciones
- Reparación de instalaciones automatizadas. ELEE0109De EverandReparación de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- Control de Sistemas Robotizados - Resumen Unidad 2Documento24 páginasControl de Sistemas Robotizados - Resumen Unidad 2BesayAún no hay calificaciones
- Procesos auxiliares de fabricación en el mecanizado por corte y conformado. FMEH0209De EverandProcesos auxiliares de fabricación en el mecanizado por corte y conformado. FMEH0209Aún no hay calificaciones
- Act. 2 Presentación DURAN DIAZ JORGE IM221464 8°ADocumento12 páginasAct. 2 Presentación DURAN DIAZ JORGE IM221464 8°Aim231496Aún no hay calificaciones
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311De EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Calificación: 2 de 5 estrellas2/5 (1)
- 2da Parte Exposición - Transmision y ReductoresDocumento6 páginas2da Parte Exposición - Transmision y ReductoresAmigo InversiónAún no hay calificaciones
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalDe EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalCalificación: 5 de 5 estrellas5/5 (4)
- UD9 Soldadura de RobotDocumento39 páginasUD9 Soldadura de RobotCristian Viqueira carnotaAún no hay calificaciones
- Montaje y reparación de sistemas eléctricos y electrónicos de bienes de equipo y máquinas industriales. FMEE0208De EverandMontaje y reparación de sistemas eléctricos y electrónicos de bienes de equipo y máquinas industriales. FMEE0208Aún no hay calificaciones
- 2 - Servomotores y SensoresDocumento59 páginas2 - Servomotores y SensoresJose YepesAún no hay calificaciones
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208De EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Aún no hay calificaciones
- Las Transmisiones Son Los Elementos Encargados de Transmitir El Movimiento Desde Los Actuadores Hasta Las ArticulacionesDocumento5 páginasLas Transmisiones Son Los Elementos Encargados de Transmitir El Movimiento Desde Los Actuadores Hasta Las ArticulacionesSebastian JimenezAún no hay calificaciones
- Diagnóstico de averías y mantenimiento correctivo de sistemas domóticos e inmóticos. ELEM0111De EverandDiagnóstico de averías y mantenimiento correctivo de sistemas domóticos e inmóticos. ELEM0111Aún no hay calificaciones
- Mecanismos de Transmisión-Robótica IndustrialDocumento4 páginasMecanismos de Transmisión-Robótica IndustrialAnny PalomoAún no hay calificaciones
- Robotica: Transmisiones y Reductores y Sistemas de AccionDocumento4 páginasRobotica: Transmisiones y Reductores y Sistemas de AccionDiego Alejandro Ledesma FloresAún no hay calificaciones
- ROBÓTICADocumento85 páginasROBÓTICAIsrael García NeloAún no hay calificaciones
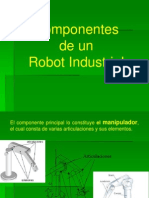
- Componentes de Un RobotDocumento3 páginasComponentes de Un RobotYoo Puees50% (2)
- RI Unidad 2 Final 1de2Documento23 páginasRI Unidad 2 Final 1de2Alejandro PereyraAún no hay calificaciones
- Elementos Terminales - Cinematica - Dinamica - Wilmer YanchapantaDocumento30 páginasElementos Terminales - Cinematica - Dinamica - Wilmer YanchapantaWilmer YtAún no hay calificaciones
- Robotica IndustrialDocumento19 páginasRobotica Industrialrivac85Aún no hay calificaciones
- Resumen Libro Fundamentos de RoboticaDocumento41 páginasResumen Libro Fundamentos de RoboticaaaAún no hay calificaciones
- 4.6 Comunicación de Robot Con Dispositivos de ControlDocumento8 páginas4.6 Comunicación de Robot Con Dispositivos de ControlStarkream28Aún no hay calificaciones
- Robots SerialesDocumento21 páginasRobots SerialesJuan GuzmanAún no hay calificaciones
- Investigación1 MorenoGallegosEmilio-17041177 RoboticaDocumento17 páginasInvestigación1 MorenoGallegosEmilio-17041177 RoboticaEdgar MorenoAún no hay calificaciones
- Morfologia Del Robot PDFDocumento10 páginasMorfologia Del Robot PDFphillamxAún no hay calificaciones
- Morfología de Los Robots IndustrialesDocumento21 páginasMorfología de Los Robots IndustrialesKevin CastilloAún no hay calificaciones
- Apuntes de Robótica UD1 Punto 5Documento13 páginasApuntes de Robótica UD1 Punto 5Francisco Alfonso Hernandez BravoAún no hay calificaciones
- Cuestionario de Robótica PDFDocumento17 páginasCuestionario de Robótica PDFIsrael Bonilla50% (4)
- Transmisiones y ReductoresDocumento2 páginasTransmisiones y ReductoresErick Gomez VelazquezAún no hay calificaciones
- RobotDocumento5 páginasRobotlarmmxAún no hay calificaciones
- Informe N°1 RoboticaDocumento15 páginasInforme N°1 RoboticaEduardo QuistanAún no hay calificaciones
- Tema 1.3 y 1.4 Actuadores, Sensores y Efectores FinalesDocumento22 páginasTema 1.3 y 1.4 Actuadores, Sensores y Efectores FinalesYami CortezAún no hay calificaciones
- Investigación Sobre Trayectorias Paramétricas, Perfil Trapezoidal y Restricciones de TrayectoriasDocumento9 páginasInvestigación Sobre Trayectorias Paramétricas, Perfil Trapezoidal y Restricciones de TrayectoriasLeonardo Romo100% (1)
- Estructura de Un Robot IndustrialDocumento20 páginasEstructura de Un Robot IndustrialPerla Rodríguez PAún no hay calificaciones
- Apuntes de Robótica UD1 Punto 3Documento11 páginasApuntes de Robótica UD1 Punto 3Francisco Alfonso Hernandez BravoAún no hay calificaciones
- Definición y Elementos BásicosDocumento11 páginasDefinición y Elementos BásicosAndy PolancoAún no hay calificaciones
- Estructura de Un Robot IndustrialDocumento22 páginasEstructura de Un Robot IndustrialMiroslava GalvánAún no hay calificaciones
- Tif ScadaDocumento7 páginasTif ScadaLuis Gabriel QuispeAún no hay calificaciones
- Robotica Tarea 2 Aportes Significativos 123Documento25 páginasRobotica Tarea 2 Aportes Significativos 123Samuel GutierrezAún no hay calificaciones
- ROBOTICADocumento5 páginasROBOTICAvictoria stherAún no hay calificaciones
- OptativaDocumento9 páginasOptativamiguelAún no hay calificaciones
- Estructura Mecánica de Un RobotDocumento21 páginasEstructura Mecánica de Un RobotSuspeso100% (1)
- Tarea 1 RoboticaDocumento5 páginasTarea 1 RoboticaIsmael AguilarAún no hay calificaciones
- Pia Arq RobotsDocumento27 páginasPia Arq RobotsAlex MartinezAún no hay calificaciones
- 2 Componentes de Un Robot IndustrialDocumento26 páginas2 Componentes de Un Robot IndustrialJorge L. Aguilar Martínez100% (1)
- Elementos Constitutivos de Un Robot IndustrialDocumento6 páginasElementos Constitutivos de Un Robot Industrialalejandro urbinaAún no hay calificaciones
- Robotic ADocumento9 páginasRobotic AjesussimpsonAún no hay calificaciones
- Efectores y PrecisionDocumento29 páginasEfectores y PrecisionEli D'KidAún no hay calificaciones
- Transmisiones y ReductoresDocumento3 páginasTransmisiones y ReductoresMiroslava GalvánAún no hay calificaciones
- Practica 9 Completa PDFDocumento22 páginasPractica 9 Completa PDFManuel De Jesus ValenzuelaAún no hay calificaciones
- Fase 6Documento16 páginasFase 6carolina pereiraAún no hay calificaciones
- Reporte Brazo RoboticoDocumento33 páginasReporte Brazo RoboticoKevin EstradaAún no hay calificaciones
- Brazo Tipo CartesianoDocumento5 páginasBrazo Tipo CartesianoMich VellveAún no hay calificaciones
- Unidad 1 Tarea 1Documento14 páginasUnidad 1 Tarea 1cairoAún no hay calificaciones
- Concepto de RoboticaDocumento26 páginasConcepto de Roboticabomaye10% (1)
- Control Numerico ExpoDocumento19 páginasControl Numerico ExpoJorge ZozayaAún no hay calificaciones
- Practica 4Documento8 páginasPractica 4sistemaelectricoAún no hay calificaciones
- Practica 1Documento5 páginasPractica 1sistemaelectricoAún no hay calificaciones
- 01 Representación de La PosiciónDocumento5 páginas01 Representación de La PosiciónsistemaelectricoAún no hay calificaciones
- 9567 34712 1 SMDocumento8 páginas9567 34712 1 SMsistemaelectricoAún no hay calificaciones
- 02 Representación de La Orientación.Documento12 páginas02 Representación de La Orientación.sistemaelectricoAún no hay calificaciones
- Practica 3Documento12 páginasPractica 3sistemaelectricoAún no hay calificaciones
- Practica 5Documento33 páginasPractica 5sistemaelectricoAún no hay calificaciones
- Practica 2Documento18 páginasPractica 2sistemaelectricoAún no hay calificaciones
- 01 Tipos de TrayectoriasDocumento6 páginas01 Tipos de TrayectoriassistemaelectricoAún no hay calificaciones
- 01 Tipos de TrayectoriasDocumento6 páginas01 Tipos de TrayectoriassistemaelectricoAún no hay calificaciones
- 01 Tipos de TrayectoriasDocumento6 páginas01 Tipos de TrayectoriassistemaelectricoAún no hay calificaciones
- Teorias de La MotivaciónDocumento9 páginasTeorias de La MotivaciónsistemaelectricoAún no hay calificaciones
- 02 Cinemática Directa e Inversa.Documento10 páginas02 Cinemática Directa e Inversa.sistemaelectricoAún no hay calificaciones
- Estructura Mecánica de Un RobotDocumento9 páginasEstructura Mecánica de Un RobotsistemaelectricoAún no hay calificaciones
- RODAMIENTOSDocumento1 páginaRODAMIENTOSsistemaelectricoAún no hay calificaciones
- Clasificación de Robots IndustrialesDocumento10 páginasClasificación de Robots IndustrialessistemaelectricoAún no hay calificaciones
- Manual de OperacionesDocumento12 páginasManual de OperacionessistemaelectricoAún no hay calificaciones
- Manual de MantenimientoDocumento8 páginasManual de MantenimientosistemaelectricoAún no hay calificaciones
- Función de TransferenciaDocumento17 páginasFunción de Transferenciasistemaelectrico100% (1)
- Los 7 Hábitos de La Gente Altamente EfectivaDocumento1 páginaLos 7 Hábitos de La Gente Altamente EfectivasistemaelectricoAún no hay calificaciones
- GRASASDocumento4 páginasGRASASsistemaelectricoAún no hay calificaciones
- Sistemas de ControlDocumento4 páginasSistemas de ControlsistemaelectricoAún no hay calificaciones
- Cuadro Sinoptico de Definición de Robot PDFDocumento1 páginaCuadro Sinoptico de Definición de Robot PDFsistemaelectricoAún no hay calificaciones
- Características DinamicasDocumento22 páginasCaracterísticas DinamicassistemaelectricoAún no hay calificaciones
- Control Automático (Manual)Documento20 páginasControl Automático (Manual)sistemaelectrico100% (1)
- Sistemas de Control Lazo Abierto y Lazo CerradoDocumento11 páginasSistemas de Control Lazo Abierto y Lazo CerradosistemaelectricoAún no hay calificaciones
- Estabilidad en Sistemas LinealesDocumento9 páginasEstabilidad en Sistemas LinealessistemaelectricoAún no hay calificaciones
- Teorías de MotivaciónDocumento16 páginasTeorías de MotivaciónsistemaelectricoAún no hay calificaciones
- Sistemas de ControlDocumento4 páginasSistemas de ControlsistemaelectricoAún no hay calificaciones
- Informe 01 Motores de Combustion InternaDocumento36 páginasInforme 01 Motores de Combustion InternaJosePeñaTorresAún no hay calificaciones
- 04 Dispositivos de To y SujecionDocumento47 páginas04 Dispositivos de To y SujecionGerardo Fernandez Farias100% (1)
- Cuestionario1 (Cap4-LibroDiagnósticoOBDII Crouse)Documento4 páginasCuestionario1 (Cap4-LibroDiagnósticoOBDII Crouse)Hemay CortesAún no hay calificaciones
- Seles SpeedDocumento26 páginasSeles SpeedEduardo Yagüe Gomez56% (9)
- Caja 4F27E FordDocumento260 páginasCaja 4F27E FordPacoSitja50% (4)
- M. Iv Ayudante de Mantenimiento Mecánico PDFDocumento124 páginasM. Iv Ayudante de Mantenimiento Mecánico PDFAnder CisnerosAún no hay calificaciones
- CRS-UNICEF S.F. Pozos de Agua. Manual de Operación y MantenimientoDocumento13 páginasCRS-UNICEF S.F. Pozos de Agua. Manual de Operación y MantenimientoOrlando Jose Leon RodriguezAún no hay calificaciones
- Manual Bibropison DS 70Documento32 páginasManual Bibropison DS 70Cristian GalleguillosAún no hay calificaciones
- 1 Descripcion de La CulataDocumento9 páginas1 Descripcion de La CulataKennedy Vargas MarceloAún no hay calificaciones
- Tarea5 TermodinamicaDocumento11 páginasTarea5 TermodinamicaAlexis Artys BullaAún no hay calificaciones
- TAREA 2 Partes de Un Motor de CADocumento6 páginasTAREA 2 Partes de Un Motor de CAEscalona Mondragón Dafne ShessidAún no hay calificaciones
- FS3640020Documento1 páginaFS3640020Julio Cesar Morales SalasAún no hay calificaciones
- Caja de Velocidades Con Poleas PDFDocumento3 páginasCaja de Velocidades Con Poleas PDFsolouno69Aún no hay calificaciones
- Caja de CambiosDocumento52 páginasCaja de CambiosEmiliano Ruiz HernándezAún no hay calificaciones
- Golf A5-1Documento42 páginasGolf A5-1Yayo PodstawekAún no hay calificaciones
- Manual Operacion 01 Bha 455Documento215 páginasManual Operacion 01 Bha 455Jose BanosAún no hay calificaciones
- Abrazaderas Breeze V Band Conversion A CatDocumento5 páginasAbrazaderas Breeze V Band Conversion A CatJosé DiazAún no hay calificaciones
- Catalogo Filtros Famel Caterpillar Revmar 09Documento77 páginasCatalogo Filtros Famel Caterpillar Revmar 09Gustavo Bignone100% (1)
- Objetivo Holistico: Piezas MóvilesDocumento7 páginasObjetivo Holistico: Piezas MóvilesalfredoAún no hay calificaciones
- Volantes de Inercia Unidad 6Documento17 páginasVolantes de Inercia Unidad 6MANUEL EMILIANO AGUILAR PATINOAún no hay calificaciones
- 5.1 - 797 F Sistema Hidráulico Del Mando Del VentiladorDocumento14 páginas5.1 - 797 F Sistema Hidráulico Del Mando Del VentiladorChristian Perez100% (1)
- Bombas Pruebas HidrostáticasDocumento2 páginasBombas Pruebas HidrostáticasSergio GuerreroAún no hay calificaciones
- Tecnoamigo - Sept 2022Documento4 páginasTecnoamigo - Sept 2022AUTOTRONIC MOTORAún no hay calificaciones
- Transluz 01 - Alta - Tension PDFDocumento53 páginasTransluz 01 - Alta - Tension PDFSantiago LunaAún no hay calificaciones
- PC1 - TurbomaquinasDocumento15 páginasPC1 - TurbomaquinasKennedy Vargas MarceloAún no hay calificaciones
- TR2 ResueltoDocumento9 páginasTR2 ResueltoDarwin MontecinosAún no hay calificaciones
- Circuito de ElevaciónDocumento17 páginasCircuito de ElevaciónThomas BravoAún no hay calificaciones
- MOTOR MAZDA 323 E3 DiagnosticoDocumento5 páginasMOTOR MAZDA 323 E3 DiagnosticoLeidy Julieth Rodriguez GonzalezAún no hay calificaciones
- PIC Reloj Digital Con AlarmaDocumento12 páginasPIC Reloj Digital Con AlarmaMaster MonomasAún no hay calificaciones
- Proceso de Combustion Del Motor DieselDocumento6 páginasProceso de Combustion Del Motor DieselJordan Alejandro Ramirez MartinezAún no hay calificaciones
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- Lógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosDe EverandLógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosCalificación: 3.5 de 5 estrellas3.5/5 (7)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- Proyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadDe EverandProyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadCalificación: 5 de 5 estrellas5/5 (1)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Inteligencia artificial: Análisis de datos e innovación para principiantesDe EverandInteligencia artificial: Análisis de datos e innovación para principiantesCalificación: 4 de 5 estrellas4/5 (3)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- Cómo hacer aviones de papel y otros objetos voladoresDe EverandCómo hacer aviones de papel y otros objetos voladoresAún no hay calificaciones
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDe Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosCalificación: 5 de 5 estrellas5/5 (1)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Todo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainDe EverandTodo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainAún no hay calificaciones
- La causa raiz de los accidentes: Historias de accidentes en la industriaDe EverandLa causa raiz de los accidentes: Historias de accidentes en la industriaCalificación: 5 de 5 estrellas5/5 (1)
- Machine Learning y Deep Learning: Usando Python, Scikit y KerasDe EverandMachine Learning y Deep Learning: Usando Python, Scikit y KerasAún no hay calificaciones
- Comunicaciones industriales y WinCCDe EverandComunicaciones industriales y WinCCCalificación: 5 de 5 estrellas5/5 (4)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialCalificación: 4.5 de 5 estrellas4.5/5 (10)
- El mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosDe EverandEl mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosCalificación: 5 de 5 estrellas5/5 (2)
- Metodología básica de instrumentación industrial y electrónicaDe EverandMetodología básica de instrumentación industrial y electrónicaCalificación: 4 de 5 estrellas4/5 (12)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Perforación con tubería de revestimiento en la construcción del hoyo superficial en campos petrolerosDe EverandPerforación con tubería de revestimiento en la construcción del hoyo superficial en campos petrolerosCalificación: 5 de 5 estrellas5/5 (3)
- Ciberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialDe EverandCiberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialCalificación: 4.5 de 5 estrellas4.5/5 (11)