También podría gustarte
- Control en Cascada Del Motor DCDocumento8 páginasControl en Cascada Del Motor DCcc_10Aún no hay calificaciones
- Evaluación Servicios Arquitectura EmpresarialDocumento6 páginasEvaluación Servicios Arquitectura EmpresarialDo ViAún no hay calificaciones
- Mecánica para la automatización: conceptos fundamentalesDocumento25 páginasMecánica para la automatización: conceptos fundamentalesRuy GallegosAún no hay calificaciones
- Lab1 PDFDocumento33 páginasLab1 PDFMaycoll Maximiliano Gamarra ChuraAún no hay calificaciones
- Semana 06 Taller Operaciones Con Funciones - Composición de FuncionesDocumento5 páginasSemana 06 Taller Operaciones Con Funciones - Composición de FuncionesRenatoAún no hay calificaciones
- Metodología para La Obtención de Indicadores de Nomoto A Partir de Pruebas ExperimentalesDocumento15 páginasMetodología para La Obtención de Indicadores de Nomoto A Partir de Pruebas ExperimentalesEdWyn SanabriaAún no hay calificaciones
- Brazo de BielaDocumento13 páginasBrazo de Bielarobyn100Aún no hay calificaciones
- AA3-EV01. Esquema Comparativo. Actividad de Aprendizaje 3Documento8 páginasAA3-EV01. Esquema Comparativo. Actividad de Aprendizaje 3JESSICA FERNANDA PEREZ MONSALVE100% (1)
- Unidad II ComparadorDocumento34 páginasUnidad II ComparadorMO WerkstattAún no hay calificaciones
- Manual de Cosimir PDFDocumento37 páginasManual de Cosimir PDFManuel Ruiz RondoAún no hay calificaciones
- Diseño VHDL (Organizacion Y Arquitectura)Documento57 páginasDiseño VHDL (Organizacion Y Arquitectura)ENIC-AITCG0% (1)
- Rectificación de media onda no controlada con carga resistiva: análisis y cálculo de parámetrosDocumento8 páginasRectificación de media onda no controlada con carga resistiva: análisis y cálculo de parámetrosYeser HidalgoAún no hay calificaciones
- ModbusDocumento1 páginaModbusBryam CabreraAún no hay calificaciones
- Norma IEC - 154 - 165Documento12 páginasNorma IEC - 154 - 165Ivan BenitezAún no hay calificaciones
- Ejemplo de Regulación Práctica de Relé Térmico en Un Motor EléctricoDocumento5 páginasEjemplo de Regulación Práctica de Relé Térmico en Un Motor EléctricoChester Noel Brenes AguirreAún no hay calificaciones
- ServomecanismoDocumento3 páginasServomecanismoMahecha Lozano Laura MichellAún no hay calificaciones
- SENA Circuitos Eléctricos MixtosDocumento3 páginasSENA Circuitos Eléctricos MixtosGIANCARLOS ORJUELA BETANCOURTAún no hay calificaciones
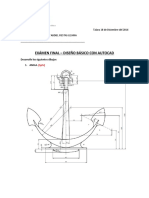
- EXÁMEN FINAL DE DISEÑO BÁSICO CON AUTOCADDocumento5 páginasEXÁMEN FINAL DE DISEÑO BÁSICO CON AUTOCADEder ChipanaAún no hay calificaciones
- Sistemas de Fuerzas TridimencionalesDocumento23 páginasSistemas de Fuerzas Tridimencionalesjhj atjAún no hay calificaciones
- Apuntes Unidad I Sistemas ProgramableDocumento12 páginasApuntes Unidad I Sistemas ProgramableAndy GaytanAún no hay calificaciones
- Topicos Avanzados de AutomatizacionDocumento9 páginasTopicos Avanzados de AutomatizacionAnonymous bqJDeCNIAún no hay calificaciones
- Informe DSP FinalDocumento47 páginasInforme DSP FinalDiego Rey TapiaAún no hay calificaciones
- Tipos de Software CADDocumento4 páginasTipos de Software CADMarce RodriguezAún no hay calificaciones
- Proyecto Capstone PDFDocumento8 páginasProyecto Capstone PDFPAOLO ANGELLO TORRES MALAGAAún no hay calificaciones
- PROGRAMACIÓN DE UN CONTROL DE TEMPERATURA - Guia DocenteDocumento12 páginasPROGRAMACIÓN DE UN CONTROL DE TEMPERATURA - Guia DocenteJuan CifuentesAún no hay calificaciones
- El Motor Paso A Paso Es Un Dispositivo Electromecánico Que Convierte Una Serie de Impulsos Eléctricos en Desplazamientos Angulares DiscretosDocumento4 páginasEl Motor Paso A Paso Es Un Dispositivo Electromecánico Que Convierte Una Serie de Impulsos Eléctricos en Desplazamientos Angulares DiscretosMarilyn ParejoAún no hay calificaciones
- Herramienta y UtillajeDocumento20 páginasHerramienta y UtillajeBenjamin Sanchez100% (1)
- Principios de Automatizacion IndustrialDocumento10 páginasPrincipios de Automatizacion IndustrialKoke Ahumada CastilloAún no hay calificaciones
- Dibujo TécnicoDocumento6 páginasDibujo TécnicoVerónica Elizabeth Paredes SantillanAún no hay calificaciones
- Control AdaptativoDocumento19 páginasControl AdaptativoRonyVargasAún no hay calificaciones
- Tesina Seguidor de LineaDocumento29 páginasTesina Seguidor de LineabrandonAún no hay calificaciones
- Diseñar circuitos electrónicos según especificacionesDocumento4 páginasDiseñar circuitos electrónicos según especificacionesAndres Felipe Valencia PimientaAún no hay calificaciones
- Preguntas DFMADocumento2 páginasPreguntas DFMAAndrea MariaAún no hay calificaciones
- Practica 1 PDFDocumento4 páginasPractica 1 PDFAndres Perez0% (1)
- La Instruccion Marca: Mandos Por Controladores Logicos Programables IDocumento26 páginasLa Instruccion Marca: Mandos Por Controladores Logicos Programables ICesar Augusto Rodriguez FigueroaAún no hay calificaciones
- Parcial 2 EDII - I2020 PDFDocumento2 páginasParcial 2 EDII - I2020 PDFBrayan Stip AvendañoAún no hay calificaciones
- Material de Apoyo de Electricidad Basica PDFDocumento9 páginasMaterial de Apoyo de Electricidad Basica PDFALAIN DIRCEU ANAYA MENDOZAAún no hay calificaciones
- Ensayo ElectromecanicaDocumento13 páginasEnsayo ElectromecanicaCristian UscateguiAún no hay calificaciones
- Brazo Robotico IEEE (Corregido)Documento10 páginasBrazo Robotico IEEE (Corregido)Camilo CorredorAún no hay calificaciones
- Accesorios para Instalaciones IndustrialesDocumento13 páginasAccesorios para Instalaciones IndustrialesGonzález Mora Karen RocioAún no hay calificaciones
- Metodologia CADDocumento2 páginasMetodologia CADXava Fragoso100% (2)
- Poner La Cola Al BurroDocumento10 páginasPoner La Cola Al BurroJuan Pedro Santos FernándezAún no hay calificaciones
- Ejercicio 2.7Documento2 páginasEjercicio 2.7Duvan Bayona100% (1)
- Practica Nro 1Documento3 páginasPractica Nro 1Carlos sarachoAún no hay calificaciones
- Preguntas Test GrafcetDocumento22 páginasPreguntas Test GrafcetMiguel Lobillo FernandezAún no hay calificaciones
- Trabajo Entregable 2 Automatismo Electri y Electro InductDocumento12 páginasTrabajo Entregable 2 Automatismo Electri y Electro InductRivaldo ČötãAún no hay calificaciones
- Samba PLCDocumento8 páginasSamba PLCSosa RosasAún no hay calificaciones
- Bitacora y Gamas de Mantenimiento BicicletaDocumento7 páginasBitacora y Gamas de Mantenimiento BicicletaAlex Fabricio Navarrete TorresAún no hay calificaciones
- Ciclo-08-Ie-Automatismo y Control de Procesos IndustrialesDocumento2 páginasCiclo-08-Ie-Automatismo y Control de Procesos IndustrialesRomel Cárdenas Javier100% (1)
- Actividad de Aprendizaje #02Documento6 páginasActividad de Aprendizaje #02melrock suarez100% (1)
- Cinemática Del RobotDocumento16 páginasCinemática Del RobotGerson Siguenza DavalosAún no hay calificaciones
- Silabo Ing. AmbientalDocumento4 páginasSilabo Ing. AmbientalYoseph Cronwell OjedaAún no hay calificaciones
- Dimensionamiento Dibujo de Ingeniería GieseckDocumento54 páginasDimensionamiento Dibujo de Ingeniería GieseckCristhian Huamán PerezAún no hay calificaciones
- Comparadores Logicos DigtalesDocumento5 páginasComparadores Logicos DigtalesDarwinAún no hay calificaciones
- Elementos de SujecionDocumento12 páginasElementos de SujecionEmerson RodriguezAún no hay calificaciones
- Tipos de Robots Industriales y sus TrayectoriasDocumento14 páginasTipos de Robots Industriales y sus TrayectoriasHera LuceroAún no hay calificaciones
- PLAN DE ACCIÓN - Taller MecanicoDocumento9 páginasPLAN DE ACCIÓN - Taller Mecanicokiara castilloAún no hay calificaciones
- Arranque de Dos Motores Con Secuencia de Arranque Temporizado.Documento12 páginasArranque de Dos Motores Con Secuencia de Arranque Temporizado.Johny JacomeAún no hay calificaciones
- Manual de Practicas de Diodos y Transistores - P1 - UNIDAD I RubricaDocumento9 páginasManual de Practicas de Diodos y Transistores - P1 - UNIDAD I RubricaEliasAún no hay calificaciones
- FotoceldaDocumento5 páginasFotoceldapedroAún no hay calificaciones
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Aún no hay calificaciones
- 2012 - AADECA - Control de Velocidad y Posicion A Lazo Cerrado de Un Motor de CC Con dsPIC30F4011Documento9 páginas2012 - AADECA - Control de Velocidad y Posicion A Lazo Cerrado de Un Motor de CC Con dsPIC30F4011edroalAún no hay calificaciones
- Hpev Spanish PDFDocumento4 páginasHpev Spanish PDFJorge PintoAún no hay calificaciones
- 47721739003Documento23 páginas47721739003negritilloomarAún no hay calificaciones
- Pid Motor DCDocumento148 páginasPid Motor DCLeonardo CorredorAún no hay calificaciones
- Manual de Fluke 1735 PDFDocumento74 páginasManual de Fluke 1735 PDFEDGARAún no hay calificaciones
- Resolución Arconel 038 - 15Documento6 páginasResolución Arconel 038 - 15negritilloomarAún no hay calificaciones
- 2 Pliego Tarifario SPEE 2020 PDFDocumento35 páginas2 Pliego Tarifario SPEE 2020 PDFDiego VergaraAún no hay calificaciones
- 47721739003Documento23 páginas47721739003negritilloomarAún no hay calificaciones
- Catalogo ElectrocablesDocumento132 páginasCatalogo Electrocablesramiro1330% (1)
- Circuito de Fuerza1Documento1 páginaCircuito de Fuerza1negritilloomarAún no hay calificaciones
- Cómo Tratar El PlagioDocumento3 páginasCómo Tratar El PlagioElizabeth RazoAún no hay calificaciones
- C, Industrial 1Documento1 páginaC, Industrial 1negritilloomarAún no hay calificaciones
- Aplicaciones LOGO #1 - SDocumento84 páginasAplicaciones LOGO #1 - Sisaac_268184% (19)
- Programa CI 2010Documento4 páginasPrograma CI 2010negritilloomarAún no hay calificaciones
- Contenido de Geografia ListoDocumento7 páginasContenido de Geografia ListoEleomar Martínez LuisAún no hay calificaciones
- Diagramas ProcesoDocumento64 páginasDiagramas ProcesoIker RV100% (1)
- Ficha Tecnica Nonil FenolDocumento2 páginasFicha Tecnica Nonil Fenolheidy paola del castillo carrilloAún no hay calificaciones
- Caracteristicas Estáticas de Los SensoresDocumento13 páginasCaracteristicas Estáticas de Los SensoresFabricio Veintimilla BautistaAún no hay calificaciones
- Diagrama de Nyquist para evaluar estabilidadDocumento4 páginasDiagrama de Nyquist para evaluar estabilidadKevin Ascue ContrerasAún no hay calificaciones
- Propuesta Metodológica para La Validacion de Los Modelos de Recursos de Codelco Chile PDFDocumento95 páginasPropuesta Metodológica para La Validacion de Los Modelos de Recursos de Codelco Chile PDFJorge Ariel Osorio GuzmanAún no hay calificaciones
- Tensión superficial y capilaridad en fluidosDocumento8 páginasTensión superficial y capilaridad en fluidosLenin Alfaro VidalAún no hay calificaciones
- 2 Trabajo - Piso de CementoDocumento32 páginas2 Trabajo - Piso de CementoAna EstradaAún no hay calificaciones
- SistemasGobiernoFFMMDocumento39 páginasSistemasGobiernoFFMMEmanuel Ugaz SalazarAún no hay calificaciones
- Ficha de Infancia SkliarDocumento3 páginasFicha de Infancia SkliarYESICA SOFIA GUTIERREZ HURTADOAún no hay calificaciones
- Bases Funcionales Del RendimientoDocumento3 páginasBases Funcionales Del RendimientoMartin Leonel PolverigianiAún no hay calificaciones
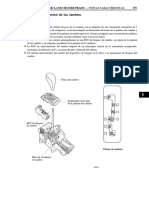
- Mecanismo de Control de Los Cambios: Land Cruiser/ Land Cruiser Prado - Nuevas Caracteristicas 201Documento3 páginasMecanismo de Control de Los Cambios: Land Cruiser/ Land Cruiser Prado - Nuevas Caracteristicas 201urielferAún no hay calificaciones
- MEGATENDENCIADocumento15 páginasMEGATENDENCIAjazminAún no hay calificaciones
- Accidentes PunzocortantesDocumento27 páginasAccidentes PunzocortantesMersy SCAún no hay calificaciones
- Anatomía de los tejidos animalesDocumento10 páginasAnatomía de los tejidos animalesMiqueliAún no hay calificaciones
- TEMPERATURADocumento22 páginasTEMPERATURARonald Jhonn Condori FloresAún no hay calificaciones
- Puentes Losa PretensadoDocumento328 páginasPuentes Losa Pretensadocarito 01Aún no hay calificaciones
- Componentes de Un Espectrómetro de MasasDocumento8 páginasComponentes de Un Espectrómetro de MasasTania Escobar TorneroAún no hay calificaciones
- Derechos Acuicolas - Ancash - VigentesDocumento24 páginasDerechos Acuicolas - Ancash - VigentesBryanMendezReynosoAún no hay calificaciones
- TARIFAS PERMISO SANITARIO Nivel Estadal PDFDocumento5 páginasTARIFAS PERMISO SANITARIO Nivel Estadal PDForson1970Aún no hay calificaciones
- Ubicación TemporalDocumento10 páginasUbicación TemporalMaría JoséAún no hay calificaciones
- Tanque Elevado Sap2000 PDFDocumento108 páginasTanque Elevado Sap2000 PDFbeto032121100% (1)
- Quemaduras Apuntes de InvestigacionDocumento2 páginasQuemaduras Apuntes de InvestigacionLINDA JAZMIN MOSQUERA AGUDELOAún no hay calificaciones
- PRT 048Documento7 páginasPRT 048adiazcalidadAún no hay calificaciones
- Cristian 00553Documento2 páginasCristian 00553Victor Rigoberto Cuc SubAún no hay calificaciones
- Cuadernillo de Trabajo 2do GradoDocumento26 páginasCuadernillo de Trabajo 2do Gradoeira sahily santiago hernandezAún no hay calificaciones
- Sin Patria Ni TumbaDocumento61 páginasSin Patria Ni TumbaJosé da CruzAún no hay calificaciones
- Especificaciones Tecnicas Especificas Partidas Nuevas #02Documento35 páginasEspecificaciones Tecnicas Especificas Partidas Nuevas #02Guimo LastraAún no hay calificaciones