También podría gustarte
- Diagrama Electrico - Antes 2008Documento16 páginasDiagrama Electrico - Antes 2008Juan Jose Perdomo75% (8)
- Tema 3 (Análisis Elec. de Actuadores)Documento22 páginasTema 3 (Análisis Elec. de Actuadores)Uziel Vicencio100% (6)
- C9 Motores para Máquinas Fabricadas Por CaterpillarDocumento152 páginasC9 Motores para Máquinas Fabricadas Por CaterpillarNippur de Lagash80% (10)
- Bombas de Inyección Diésel CaterpillarDocumento63 páginasBombas de Inyección Diésel CaterpillarAndrew Galvez Sanchez77% (13)
- Codigos de Falla IsxDocumento5 páginasCodigos de Falla IsxEsteban MunaresAún no hay calificaciones
- Técnicas Profesionales de Manejo ISXe4Documento45 páginasTécnicas Profesionales de Manejo ISXe4Juan Escamilla Rojas100% (1)
- ISX Euro 4Documento14 páginasISX Euro 4Juan Escamilla Rojas75% (8)
- 2 Especificaciones Eléctricas Sensores Actuadores ISXDocumento5 páginas2 Especificaciones Eléctricas Sensores Actuadores ISXharoldAún no hay calificaciones
- Datos de Operacion Motor ISXDocumento2 páginasDatos de Operacion Motor ISXSampre Terrestre100% (5)
- Diagnóstico y Solución en Sistemas Electrónicos DieselDocumento178 páginasDiagnóstico y Solución en Sistemas Electrónicos Dieselpevare42% (12)
- Escaner Cummins InsiteDocumento2 páginasEscaner Cummins InsiteChrystian Meller Vasquez Mayta100% (1)
- Motor CumminsDocumento10 páginasMotor CumminsRoberto Mamani Huillca100% (2)
- Operacion Nuevo ColumbiaDocumento62 páginasOperacion Nuevo ColumbiaSergio MitaAún no hay calificaciones
- ISF Combo V1.0 EspañolDocumento293 páginasISF Combo V1.0 EspañolMIGUEL ANGEL HERRERA PATINO95% (42)
- Arranque de Un Motor Trifásico Por Arrancador SuaveDocumento45 páginasArranque de Un Motor Trifásico Por Arrancador SuaveEdwin Olivario Taipe Suri0% (1)
- Codigos Falla IsmDocumento1 páginaCodigos Falla IsmJuan Jose Bolivar Rios100% (1)
- Codigos de Falla ISX Modulo CM871kilin PDFDocumento16 páginasCodigos de Falla ISX Modulo CM871kilin PDFOjos VerdesAún no hay calificaciones
- ISX SignatureDocumento20 páginasISX SignatureAlejandro RuizAún no hay calificaciones
- Operacion Cummins PDFDocumento53 páginasOperacion Cummins PDFJose Luis Calla Huanca100% (2)
- Operación y Diagnóstico Del EcmDocumento18 páginasOperación y Diagnóstico Del EcmMASTERTECH_0198% (42)
- Árbol de Diagnósticos de Desempeño Del Motor - Motores ISB Equipados Con EGR (Sistema de Control Electrónico CM850)Documento59 páginasÁrbol de Diagnósticos de Desempeño Del Motor - Motores ISB Equipados Con EGR (Sistema de Control Electrónico CM850)kamana7Aún no hay calificaciones
- Diésel Cummins ISX Regeneracion.Documento26 páginasDiésel Cummins ISX Regeneracion.Claudio Slimcs100% (9)
- Nueva Pregio & K2700Documento54 páginasNueva Pregio & K2700MARCO AGUIRRE100% (1)
- Diésel San Pedro-Tren Motriz.Documento36 páginasDiésel San Pedro-Tren Motriz.George GuerreroAún no hay calificaciones
- Códigos IsxDocumento6 páginasCódigos IsxKurt Vader100% (1)
- Manual TruckTech+ ClientesDocumento83 páginasManual TruckTech+ ClientesChristian67% (3)
- Regeneracion CumminsDocumento6 páginasRegeneracion CumminsMarco MelchorAún no hay calificaciones
- Ficha t680 2020Documento3 páginasFicha t680 2020Javier Oaxaca arenas100% (1)
- Bomba de EngranajesDocumento5 páginasBomba de EngranajesreneAún no hay calificaciones
- INSITE Fault Viewer Training EspañolDocumento21 páginasINSITE Fault Viewer Training Españollkv100% (1)
- Presentacion ISXDocumento20 páginasPresentacion ISXJuan Pablo Puentes67% (3)
- Códigos de Falla Cummins - ISX Signature PDFDocumento6 páginasCódigos de Falla Cummins - ISX Signature PDFAleDcgcAún no hay calificaciones
- Curso 302 TTT Principios BasicosDocumento47 páginasCurso 302 TTT Principios BasicosWILDER100% (1)
- Examen de preparación para CDL: Conocimientos GeneralesDe EverandExamen de preparación para CDL: Conocimientos GeneralesAún no hay calificaciones
- Mantencion Kenworth t600Documento19 páginasMantencion Kenworth t600Camilo Urrutia50% (2)
- Plantillas Tractocamiones EPA98Documento14 páginasPlantillas Tractocamiones EPA98Leonardo Avila100% (2)
- Codigos de FallaDocumento4 páginasCodigos de FallaAdan Moreno GomezAún no hay calificaciones
- 03) Modelos (Modo de Compatibilidad)Documento30 páginas03) Modelos (Modo de Compatibilidad)Hector Dongo Arrayan100% (3)
- Caracteristicas Cummins IsxDocumento15 páginasCaracteristicas Cummins IsxRoberto Carlos Montoya Sirlupu100% (3)
- Ubicacion de Sensores.Documento1 páginaUbicacion de Sensores.dario67% (3)
- Presentacion 777FDocumento102 páginasPresentacion 777FAngela Allen100% (5)
- Exámen para MecánicosDocumento22 páginasExámen para MecánicosRosemary Calderon Vigo85% (13)
- Codigos de Falla N-14 Celect Plus-2Documento9 páginasCodigos de Falla N-14 Celect Plus-2Maquinaria Pesada Servis100% (1)
- Componentes Electrónica Del Motor CumminsDocumento32 páginasComponentes Electrónica Del Motor Cumminstaller avansys100% (1)
- Motor Cummins N14Documento8 páginasMotor Cummins N14Fabrizio Jesus Morales Salirrosas100% (2)
- Codigos de FallaDocumento7 páginasCodigos de FallaDarisnel Santana100% (2)
- Funciones Básicas de Insite - Características Motor y ParametrosDocumento9 páginasFunciones Básicas de Insite - Características Motor y ParametrosMASTERTECH_01Aún no hay calificaciones
- Diagramas Del Motor ISX-Signature PDFDocumento22 páginasDiagramas Del Motor ISX-Signature PDFAna Lorca75% (4)
- Manual de Diagnósticos de Códigos de Falla Del ISX CM570Documento3 páginasManual de Diagnósticos de Códigos de Falla Del ISX CM570sergio100% (1)
- Tec Prof Demanejoisx 2005 120522204415 Phpapp01Documento84 páginasTec Prof Demanejoisx 2005 120522204415 Phpapp01Edwin Olivario Taipe Suri100% (5)
- 2020 2 ImDocumento242 páginas2020 2 ImDaniel Escorza MejiaAún no hay calificaciones
- Electronica Del Motor Diesel 7.3 L DIT PDFDocumento107 páginasElectronica Del Motor Diesel 7.3 L DIT PDFPedro AparicioAún no hay calificaciones
- Cableado e Instalaciones Electricas Peugeot 306 Parte 2 1 PDFDocumento109 páginasCableado e Instalaciones Electricas Peugeot 306 Parte 2 1 PDFoscar taberaAún no hay calificaciones
- Código de Falla. 483Documento2 páginasCódigo de Falla. 483roger ccasaAún no hay calificaciones
- Sistema Celect CumminsDocumento16 páginasSistema Celect CumminsERNESTOAún no hay calificaciones
- El InyectorDocumento30 páginasEl Inyectortonymeloaqp100% (3)
- Tec Prof de Manejo ISX - 2015Documento47 páginasTec Prof de Manejo ISX - 2015alan100% (1)
- Códigos de Fallas Cummins en Español ISX SignatureDocumento3 páginasCódigos de Fallas Cummins en Español ISX SignatureLaura Castuera HerreraAún no hay calificaciones
- Procedimiento Tecnico Primaax KenworthDocumento76 páginasProcedimiento Tecnico Primaax KenworthMauricio Balbuena TorresAún no hay calificaciones
- Sensores Signature ISXDocumento15 páginasSensores Signature ISXJoseVernonAún no hay calificaciones
- 4-Curso de Sensores de TemperaturaDocumento8 páginas4-Curso de Sensores de TemperaturaDani-meganeboy100% (3)
- TruckMechanicO 927Documento58 páginasTruckMechanicO 927Kristen Holmes100% (1)
- Camion MineroDocumento41 páginasCamion MineroYobany Alexander RamírezAún no hay calificaciones
- Sist Elect 906 4000Documento4 páginasSist Elect 906 4000Nestor Zela Maman100% (2)
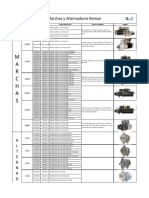
- Tabla de Referencia Marchas y AlternadoresDocumento2 páginasTabla de Referencia Marchas y AlternadoresDossi Duranti BrunoAún no hay calificaciones
- Sig - ISX - QSX15 Priming Pump TsDocumento5 páginasSig - ISX - QSX15 Priming Pump TsCarlos Rivera100% (1)
- 650 Twin IB Training (Spanish)Documento117 páginas650 Twin IB Training (Spanish)leandro ahumada100% (1)
- Historia VW Golf Gti OriginalDocumento6 páginasHistoria VW Golf Gti OriginalcaresilAún no hay calificaciones
- 7.1 Motor Electrónico PEECDocumento13 páginas7.1 Motor Electrónico PEECDiego GonzalezAún no hay calificaciones
- Diagrama de Fluja Sistema de Admision de Aire ISXDocumento2 páginasDiagrama de Fluja Sistema de Admision de Aire ISXCristian Muñoz100% (1)
- Bomba RotativaDocumento29 páginasBomba Rotativachemo195Aún no hay calificaciones
- Modificación de Un Motor Rally Modelo LancerDocumento27 páginasModificación de Un Motor Rally Modelo LancerAngelAlbarracin100% (1)
- CumminsDocumento7 páginasCumminsJuan Betancur OsorioAún no hay calificaciones
- Motores PaccarDocumento9 páginasMotores PaccarRAMON CALDERON100% (1)
- CH395 - TP 17 590 395Documento14 páginasCH395 - TP 17 590 395Edwin Olivario Taipe SuriAún no hay calificaciones
- Código de Conducta de La Organización Con Sus Proveedores KMMP V02Documento8 páginasCódigo de Conducta de La Organización Con Sus Proveedores KMMP V02Edwin Olivario Taipe SuriAún no hay calificaciones
- WB93R eDocumento8 páginasWB93R eEdwin Olivario Taipe SuriAún no hay calificaciones
- D65EX/WX/PX-17: Bulldozer Sobre OrugasDocumento20 páginasD65EX/WX/PX-17: Bulldozer Sobre OrugasEdwin Olivario Taipe SuriAún no hay calificaciones
- Herramienta de Calidad Total 2Documento5 páginasHerramienta de Calidad Total 2Edwin Olivario Taipe SuriAún no hay calificaciones
- E20001 A180 m106 X 7800Documento6 páginasE20001 A180 m106 X 7800Edwin Olivario Taipe SuriAún no hay calificaciones
- Foro Tarea G4 - 2Documento3 páginasForo Tarea G4 - 2Edwin Olivario Taipe SuriAún no hay calificaciones
- Bomba Rotativa de Inyección de Émbolos RadialesDocumento14 páginasBomba Rotativa de Inyección de Émbolos RadialesÁngelus Quispe Rafael0% (1)
- Bolter 88 JMC - 227Documento50 páginasBolter 88 JMC - 227Hugo Coaquira Arizaca80% (5)
- Uis PDFDocumento29 páginasUis PDFAriel Rodrigo Magne NinaAún no hay calificaciones
- Tema 1 Sistema Auxiliares Del MotorDocumento9 páginasTema 1 Sistema Auxiliares Del MotorJose Manuel Martinez Bourial0% (1)
- Carlos Cuauhtemoc Sanchez - ContravenenoDocumento3 páginasCarlos Cuauhtemoc Sanchez - ContravenenoLuz FreileAún no hay calificaciones
- Sistemas de InyecciónDocumento10 páginasSistemas de InyecciónDiiego CevallosAún no hay calificaciones
- Motores MiniaturaDocumento51 páginasMotores MiniaturaYackeline Galvez RamosAún no hay calificaciones
- Bomba AlimentadoraDocumento46 páginasBomba AlimentadoraNathanielChoqueLizarazu57% (7)
- Manual para El Operador de Cargador FrontalDocumento19 páginasManual para El Operador de Cargador Frontaldiscoduro2013Aún no hay calificaciones
- Prueba de Motores de Combustión Interna PDFDocumento5 páginasPrueba de Motores de Combustión Interna PDFAnonymous nG59YiB100% (1)
- Medidas MciDocumento181 páginasMedidas MciBryan SolórzanoAún no hay calificaciones
- 352 FichatecnicaDocumento6 páginas352 FichatecnicaNicolas Graus SanchezAún no hay calificaciones
- Conversion de Motores Diesel A GasDocumento13 páginasConversion de Motores Diesel A GasSuarez Romero Gabino AuxibioAún no hay calificaciones
- Proyecto Mini Banco de PruebasDocumento32 páginasProyecto Mini Banco de PruebasClar Jubal Shicshi Ramires80% (5)
- Sistemas de Inyección Diesel ConvencionalesDocumento4 páginasSistemas de Inyección Diesel Convencionaleslaft99Aún no hay calificaciones
- All 167 1 Catalogo Riduttori GPL Low Spa PDFDocumento11 páginasAll 167 1 Catalogo Riduttori GPL Low Spa PDFtaller avansysAún no hay calificaciones
- Introducion A La Maquinaria Pesada PDFDocumento97 páginasIntroducion A La Maquinaria Pesada PDFAlexander ChillitupaAún no hay calificaciones