También podría gustarte
- Tema 3. Método de Trabajo y EnergíaDocumento21 páginasTema 3. Método de Trabajo y EnergíaRomulo MelendezAún no hay calificaciones
- Mecanismo Man BielDocumento13 páginasMecanismo Man BielEduardo EscobarAún no hay calificaciones
- 4ta Unidad DinamicaDocumento4 páginas4ta Unidad DinamicaOrlando HerradaAún no hay calificaciones
- Ejercicio Resuelto Sistema de Edo en MatlabDocumento4 páginasEjercicio Resuelto Sistema de Edo en Matlabcamilassoto_roAún no hay calificaciones
- User RPLDocumento99 páginasUser RPLJose AlmanzaAún no hay calificaciones
- Intensidad Del Campo EléctricoDocumento3 páginasIntensidad Del Campo EléctricoElvis David Olivera MerloAún no hay calificaciones
- Práctica 2Documento16 páginasPráctica 2Candido Basilio CruzAún no hay calificaciones
- Paper Diseño y Construcción de Circuitos de Carga y Descarga de CapacitoresDocumento10 páginasPaper Diseño y Construcción de Circuitos de Carga y Descarga de CapacitoresDAVID SEBASTIAN PANCHI QUINTANAAún no hay calificaciones
- Asignacion MecanicaDocumento12 páginasAsignacion MecanicaLeonardo Morales0% (1)
- Sanchez Ronny TAREA 5Documento35 páginasSanchez Ronny TAREA 5Ronny SanchezAún no hay calificaciones
- Problemas de Cables EstaticaDocumento8 páginasProblemas de Cables EstaticaLuis Capillo JaqueAún no hay calificaciones
- Condiciones de RotabilidadDocumento3 páginasCondiciones de RotabilidadJess MedinaAún no hay calificaciones
- Leyes de NewtonDocumento6 páginasLeyes de NewtonRicardo AlvarezAún no hay calificaciones
- Mecanica de Fluidos Unidad 3Documento17 páginasMecanica de Fluidos Unidad 3kikocachetes100% (2)
- Se Realizó Una Nivelación Geométrica Del Eje de Un Camino Por El Método Del Punto MedioDocumento3 páginasSe Realizó Una Nivelación Geométrica Del Eje de Un Camino Por El Método Del Punto MedioRommel CasavilcaAún no hay calificaciones
- 2 Cables Suspendidos - GDocumento3 páginas2 Cables Suspendidos - GAnonimus290599Aún no hay calificaciones
- PROYECTO de CalculoDocumento5 páginasPROYECTO de Calculomery trilleras0% (1)
- Proceso PolitropicoDocumento1 páginaProceso PolitropicoMary ChAún no hay calificaciones
- Ecuaciones Diferenciales-Tarea 9Documento3 páginasEcuaciones Diferenciales-Tarea 9Luis GallegosAún no hay calificaciones
- Problem A 89Documento2 páginasProblem A 89KARITO SUAREZAún no hay calificaciones
- Funciones Rampa, EscalonDocumento4 páginasFunciones Rampa, EscalonMisael Gómez100% (1)
- Taller Métodos Numéricos PDFDocumento2 páginasTaller Métodos Numéricos PDFDavid LucasAún no hay calificaciones
- Ecuaciones DiferencialesDocumento15 páginasEcuaciones DiferencialesIsmael BenitezAún no hay calificaciones
- Temario de Mecanica de FluidosDocumento4 páginasTemario de Mecanica de FluidosRene CortezAún no hay calificaciones
- Sistemas Resorte MasaDocumento15 páginasSistemas Resorte MasaMemo CuellarAún no hay calificaciones
- Formulario de Calculo 1 PDFDocumento1 páginaFormulario de Calculo 1 PDFJhonatan Rafael100% (1)
- Practica Numero 4 ''Ley de La Conservacion de La Energia''Documento7 páginasPractica Numero 4 ''Ley de La Conservacion de La Energia''Xiuhcoatl Saurat100% (2)
- Calibracion y CertificacionDocumento2 páginasCalibracion y Certificacionjohmbito100% (1)
- 6 Diagramas A BloquesDocumento14 páginas6 Diagramas A BloquesCastañeta EdgarAún no hay calificaciones
- Transformaciones Del Algebra Lineal para La Generacion de Movimiento Usando La Interfaz Grafica de Matlab PDFDocumento78 páginasTransformaciones Del Algebra Lineal para La Generacion de Movimiento Usando La Interfaz Grafica de Matlab PDFEliana RozasAún no hay calificaciones
- PyD U3Documento3 páginasPyD U3David HernandezAún no hay calificaciones
- Sesión 2 Rectas, Planos y Cilindros: Cálculo III Ingenierías Plan ComúnDocumento19 páginasSesión 2 Rectas, Planos y Cilindros: Cálculo III Ingenierías Plan ComúnJocelyn QuezadaAún no hay calificaciones
- TP1 Analisis Numérico PoveaDocumento14 páginasTP1 Analisis Numérico PoveaMich ZimmerAún no hay calificaciones
- Módulo 8 (Inestabilidad Elástica)Documento52 páginasMódulo 8 (Inestabilidad Elástica)Hugo Alberto Sosa Chavez100% (1)
- Ejercicios Primer PrevioDocumento4 páginasEjercicios Primer PrevioJorge Andres TellezAún no hay calificaciones
- (VF) Guia de Problemas #01 Cinemática de La Partícula Enero 2009Documento13 páginas(VF) Guia de Problemas #01 Cinemática de La Partícula Enero 2009andresunexpo0% (1)
- Conceptos Básicos 1.1 Y 1.2Documento10 páginasConceptos Básicos 1.1 Y 1.2Jesus Manuel Solorzano Lopez100% (1)
- Codigo en Matlab para Un Grado de LibertadDocumento8 páginasCodigo en Matlab para Un Grado de LibertadJavier Paredes AvilaAún no hay calificaciones
- CINEMÁTICADocumento8 páginasCINEMÁTICACristhiam Flores ZavalaAún no hay calificaciones
- Mecanismo Manivela-CorrederaDocumento5 páginasMecanismo Manivela-CorrederadavidAún no hay calificaciones
- Clase 3Documento14 páginasClase 3A Zenitram Fan de Pvz2Aún no hay calificaciones
- Tema 02. Ejercicios Resueltos - Teoría Atómica de Dalton y Leyes PonderalesDocumento2 páginasTema 02. Ejercicios Resueltos - Teoría Atómica de Dalton y Leyes PonderalesJeremy PeraltaAún no hay calificaciones
- Metrologia 1Documento12 páginasMetrologia 1Edzon Yujra100% (1)
- Solucionario de Dennis G Zill EcuacionesDocumento86 páginasSolucionario de Dennis G Zill EcuacionesAlejandro Amaya100% (1)
- Variables de EstadoDocumento59 páginasVariables de EstadoJuan Carlos ElectroTecAún no hay calificaciones
- Guía No.9 Ecuac Dif Variacion de ParametrosDocumento9 páginasGuía No.9 Ecuac Dif Variacion de Parametroskenia izquierdogonzalezAún no hay calificaciones
- Leccion Equilibrio y ElasticidadDocumento3 páginasLeccion Equilibrio y ElasticidadPatoCepedaAún no hay calificaciones
- Ejercicio de Examen Grados de LibertadDocumento7 páginasEjercicio de Examen Grados de LibertadRodrigoBarriosAún no hay calificaciones
- Métodos Numéricos, EsposicionDocumento10 páginasMétodos Numéricos, EsposicionEstebanGuzmanAún no hay calificaciones
- Solucion de D'AlembertDocumento3 páginasSolucion de D'AlembertJorge MatusAún no hay calificaciones
- Fuerzas IntermolecularesDocumento8 páginasFuerzas IntermolecularesIsmael DLgAún no hay calificaciones
- Ecuación Diferencial de La CatenariaDocumento4 páginasEcuación Diferencial de La CatenariaChristopher Galvez Nucamendi100% (3)
- Informe#5 Lab - FisicaDocumento16 páginasInforme#5 Lab - FisicaAdemir Sanchez RodriguezAún no hay calificaciones
- Metodo CholeskyDocumento3 páginasMetodo CholeskyAngel Alvarez GonzalezAún no hay calificaciones
- Examen de RoboticaDocumento7 páginasExamen de RoboticaIsmael Criollo ArevaloAún no hay calificaciones
- Gabarito - Din Amica: (10 Puntos)Documento10 páginasGabarito - Din Amica: (10 Puntos)Marco Andres Flores FaveroAún no hay calificaciones
- Ejercicios 1 2 3 y 4 Taller Dinamica 1Documento17 páginasEjercicios 1 2 3 y 4 Taller Dinamica 1george montoyaAún no hay calificaciones
- IE2018 TPNro 5Documento2 páginasIE2018 TPNro 5Fabian GimenezAún no hay calificaciones
- Final Practico 13-08-Todas Las Carreras-Enunciado y SoluciónDocumento4 páginasFinal Practico 13-08-Todas Las Carreras-Enunciado y SoluciónFabian GimenezAún no hay calificaciones
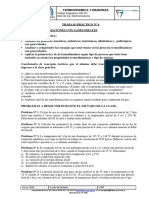
- Examen Final de Termodinámica-Parte Práctica-3º Turno Ordinario 2020Documento1 páginaExamen Final de Termodinámica-Parte Práctica-3º Turno Ordinario 2020Fabian GimenezAún no hay calificaciones
- IE2018 TPNro 6Documento5 páginasIE2018 TPNro 6Fabian GimenezAún no hay calificaciones
- IE2018 TPNro 7Documento2 páginasIE2018 TPNro 7Fabian GimenezAún no hay calificaciones
- Trabajo Práctico #4Documento3 páginasTrabajo Práctico #4Fabian GimenezAún no hay calificaciones
- Trabajo Práctico #8 Propiedades y Ciclos Con Vapor de AguaDocumento3 páginasTrabajo Práctico #8 Propiedades y Ciclos Con Vapor de AguaFabian GimenezAún no hay calificaciones
- TP 5 Sistemas de Cañerías G2Documento16 páginasTP 5 Sistemas de Cañerías G2Fabian GimenezAún no hay calificaciones
- Trabajo Práctico #5. 2º Principio de La Termodinámica 2019Documento3 páginasTrabajo Práctico #5. 2º Principio de La Termodinámica 2019Fabian GimenezAún no hay calificaciones
- Trabajo Práctico #6 Transformaciones EnergéticasDocumento3 páginasTrabajo Práctico #6 Transformaciones EnergéticasFabian GimenezAún no hay calificaciones
- Regular Problema 1 Estudiante 4Documento1 páginaRegular Problema 1 Estudiante 4Fabian GimenezAún no hay calificaciones
- Proyectos Vigentes 2022Documento2 páginasProyectos Vigentes 2022Fabian GimenezAún no hay calificaciones
- IO2 Ejercicios Resueltos GDE5Documento6 páginasIO2 Ejercicios Resueltos GDE5Fabian GimenezAún no hay calificaciones
- Trabajo Practico #1 Grupo 8 2022 (CORREGIDO)Documento22 páginasTrabajo Practico #1 Grupo 8 2022 (CORREGIDO)Fabian GimenezAún no hay calificaciones
- TP 1 Principiosbasicosdelaingdelvapor2022TERMINADO-GRUPO 6Documento18 páginasTP 1 Principiosbasicosdelaingdelvapor2022TERMINADO-GRUPO 6Fabian GimenezAún no hay calificaciones
- Integrador 2021Documento14 páginasIntegrador 2021Fabian GimenezAún no hay calificaciones
- TP3 Elementos Auxiliares - Corregido Grupo N° 3Documento22 páginasTP3 Elementos Auxiliares - Corregido Grupo N° 3Fabian GimenezAún no hay calificaciones
- Formulario ChainoDocumento1 páginaFormulario ChainoFabian GimenezAún no hay calificaciones
- TP 4 Introducción Al Tratamiento de Agua G2 - CompletoDocumento10 páginasTP 4 Introducción Al Tratamiento de Agua G2 - CompletoFabian GimenezAún no hay calificaciones
- Consigna TP Integrador Parte IIDocumento2 páginasConsigna TP Integrador Parte IIFabian GimenezAún no hay calificaciones
- RESUMEN CALDERAS Completo - Fabian GimenezDocumento202 páginasRESUMEN CALDERAS Completo - Fabian GimenezFabian GimenezAún no hay calificaciones
- Fundamento de ELECTROTECNIA GENERAL Con Octave - Capítulo 1Documento106 páginasFundamento de ELECTROTECNIA GENERAL Con Octave - Capítulo 1Fabian Gimenez100% (1)
- Actividad de Aula N° 1 - Gimenez Fabian 2021Documento6 páginasActividad de Aula N° 1 - Gimenez Fabian 2021Fabian GimenezAún no hay calificaciones
- G7 Mision, Vision y Valores (FODA Corregido)Documento20 páginasG7 Mision, Vision y Valores (FODA Corregido)Fabian GimenezAún no hay calificaciones
- Administracion de OperacionesDocumento6 páginasAdministracion de OperacionesFabian GimenezAún no hay calificaciones
- AA3 Gimenez FabianDocumento6 páginasAA3 Gimenez FabianFabian GimenezAún no hay calificaciones
- Para FabiolaDocumento3 páginasPara FabiolaFabian GimenezAún no hay calificaciones
- Trabajo Integrador N°1Documento28 páginasTrabajo Integrador N°1Fabian GimenezAún no hay calificaciones
- Ingeniería Industrial Procesos de Produccíon: Unidad 8: Fundición y MoldeoDocumento33 páginasIngeniería Industrial Procesos de Produccíon: Unidad 8: Fundición y MoldeoFabian GimenezAún no hay calificaciones
- Trabajo Práctico #4 Procesos Con Arranque de Viruta OtravezDocumento24 páginasTrabajo Práctico #4 Procesos Con Arranque de Viruta OtravezFabian GimenezAún no hay calificaciones
- Tablas de Viscosidad - D de Moody - Coeficientes de Rugosidad - K de Perdidas 2riasDocumento8 páginasTablas de Viscosidad - D de Moody - Coeficientes de Rugosidad - K de Perdidas 2riasAnonymous Th8DKuhAún no hay calificaciones
- Leyes Fundamentales de ElectromagnetismoDocumento9 páginasLeyes Fundamentales de ElectromagnetismoAlicia PiginoAún no hay calificaciones
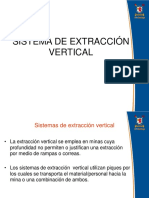
- Sistema de Extraccion VerticalDocumento56 páginasSistema de Extraccion VerticalDaniel Eduardo López RiquelmeAún no hay calificaciones
- Transcripcion 13Documento25 páginasTranscripcion 13Luis MorilloAún no hay calificaciones
- AterrizajeDocumento16 páginasAterrizajeIzhar HernándezAún no hay calificaciones
- Efecto de Placa en Muros de MamposteriaDocumento4 páginasEfecto de Placa en Muros de MamposteriaJaime CoronellAún no hay calificaciones
- Espectrofotimetria PDFDocumento10 páginasEspectrofotimetria PDFEilen Gineth Rincon PallaresAún no hay calificaciones
- Documento14 PDFDocumento15 páginasDocumento14 PDFJorge Ivan MezaAún no hay calificaciones
- BatimientoDocumento3 páginasBatimientoadebuya100% (2)
- Tubo de VenturiDocumento8 páginasTubo de VenturijfgaravitomAún no hay calificaciones
- Ejempl Examen 2PDocumento17 páginasEjempl Examen 2PJoao Jairo Flores VillanuevaAún no hay calificaciones
- Lab4 Viscosidad 1Documento11 páginasLab4 Viscosidad 1gustavoAún no hay calificaciones
- El ÁtomoDocumento10 páginasEl ÁtomobenalemanAún no hay calificaciones
- Investigación de FuerzasDocumento2 páginasInvestigación de FuerzasloloAún no hay calificaciones
- Prueba de Compresión Axial Simple No ConfinadoDocumento6 páginasPrueba de Compresión Axial Simple No ConfinadoHugo Padilla RamirezAún no hay calificaciones
- VSDGSDGH 35Documento2 páginasVSDGSDGH 35Maribel Castillejos TolesoAún no hay calificaciones
- Analisis Termodinamico de Una Columna de DestilacionDocumento67 páginasAnalisis Termodinamico de Una Columna de DestilacionNony Rechnitzer0% (1)
- Problemas Resueltos de CinemáticaDocumento14 páginasProblemas Resueltos de CinemáticaANGEL DEL RIO QUISPEAún no hay calificaciones
- EXAMEN MENSUAL (Fisica)Documento3 páginasEXAMEN MENSUAL (Fisica)kennedyhun13Aún no hay calificaciones
- Leyes de NewtonDocumento4 páginasLeyes de NewtonSherwinAún no hay calificaciones
- 2.1 Estructura Atómica Modelos EvoluciónDocumento41 páginas2.1 Estructura Atómica Modelos EvoluciónAle PerezAún no hay calificaciones
- Sistemas Dinamicos DiscretosDocumento6 páginasSistemas Dinamicos DiscretossheyAún no hay calificaciones
- Circuito Magnético de Dos BobinasDocumento16 páginasCircuito Magnético de Dos BobinasJairo RojarAún no hay calificaciones
- Aisladores Elastoméricos de Alto Amortiguamiento (HDRB)Documento11 páginasAisladores Elastoméricos de Alto Amortiguamiento (HDRB)Darwin Paul TPazAún no hay calificaciones
- ExcelDocumento22 páginasExcelRAUL ROJAS RAMOSAún no hay calificaciones
- Ley NewtonDocumento20 páginasLey NewtonelizaAún no hay calificaciones
- Centroides y Momentos Inercia PDFDocumento12 páginasCentroides y Momentos Inercia PDFRuben Chavira FloresAún no hay calificaciones
- Calculo SPT 2Documento5 páginasCalculo SPT 2Jose Arcos AguirreAún no hay calificaciones
- MobileCrane Supplementary ESDocumento116 páginasMobileCrane Supplementary ESdavidAún no hay calificaciones
- Taller Ondas y Oscilaciones-ProblemasDocumento11 páginasTaller Ondas y Oscilaciones-ProblemasPirry Brs PerdomoAún no hay calificaciones