También podría gustarte
- Sistemas DinamicosDocumento61 páginasSistemas DinamicosOscar LeonardoAún no hay calificaciones
- Prácticas Electrónica Análogica - UNEDDocumento33 páginasPrácticas Electrónica Análogica - UNEDJuan Carlos IrigoyenAún no hay calificaciones
- Ex. Sustitutorio Ee438 - Fiee UniDocumento8 páginasEx. Sustitutorio Ee438 - Fiee UniDavidAún no hay calificaciones
- E3, Lab03 - Amplificadores Operacionales PDFDocumento20 páginasE3, Lab03 - Amplificadores Operacionales PDFJaime RicardoAún no hay calificaciones
- Clase3 Amplificadores OperacionalesDocumento38 páginasClase3 Amplificadores OperacionalesCircuiJHONAún no hay calificaciones
- Problemas y Preguntas de Op-Amps - Iel115Documento8 páginasProblemas y Preguntas de Op-Amps - Iel115nomomumuffAún no hay calificaciones
- Circuitos p8Documento16 páginasCircuitos p8prohpeAún no hay calificaciones
- LAB4 Amp Operacional VirtualDocumento8 páginasLAB4 Amp Operacional VirtualLuis Gerardo Jesús Sánchez EspinozaAún no hay calificaciones
- p2 Respuestas CuestionesDocumento7 páginasp2 Respuestas CuestionesresumenesfreeAún no hay calificaciones
- Guias de Laboratorio114Documento18 páginasGuias de Laboratorio114Clases MatematicasAún no hay calificaciones
- Simulaciones OrcadDocumento10 páginasSimulaciones OrcadJuan Carlos Mendoza LimaAún no hay calificaciones
- Laboratorio 1 2015-0Documento12 páginasLaboratorio 1 2015-0Jimmie Valverde MontalvoAún no hay calificaciones
- Tercera Fase PDFDocumento28 páginasTercera Fase PDFDiego LazoAún no hay calificaciones
- LABORATORIO #7-Regulador ZenerDocumento3 páginasLABORATORIO #7-Regulador ZenerBruno EnzoAún no hay calificaciones
- Informe Lab4Documento10 páginasInforme Lab4RiguiiAún no hay calificaciones
- Prácticas Medidas de Potencia en TrifasicaDocumento12 páginasPrácticas Medidas de Potencia en TrifasicaZoilo juan nkogo bayemeAún no hay calificaciones
- Amplificador Operacional en Operación LinealDocumento24 páginasAmplificador Operacional en Operación LinealellocovottaAún no hay calificaciones
- Laboratorio 5 Amplificadores de Instrumentación 2 PDFDocumento6 páginasLaboratorio 5 Amplificadores de Instrumentación 2 PDFAldair GarcíaAún no hay calificaciones
- If4 Reguladores de Voltaje Discreto e Integrados2.0Documento6 páginasIf4 Reguladores de Voltaje Discreto e Integrados2.0Rodrigo Alonso Flores PalaciosAún no hay calificaciones
- ACS Exa Jun 21 1Documento2 páginasACS Exa Jun 21 1Iván GenshinAún no hay calificaciones
- IT144Lab7. Amp. OperacionalDocumento5 páginasIT144Lab7. Amp. OperacionalcarlosAún no hay calificaciones
- IP2 Circuitos de DisparoDocumento10 páginasIP2 Circuitos de DisparoChristian Joel Becerra JiménezAún no hay calificaciones
- CofemDocumento2 páginasCofemedwin choqueAún no hay calificaciones
- CLR02Z-12Z Ficha PDFDocumento2 páginasCLR02Z-12Z Ficha PDFPaul Guillen P0% (1)
- EE442Lab5. Amp. OperacionalDocumento5 páginasEE442Lab5. Amp. OperacionalBryan Jesus RAAún no hay calificaciones
- Práctica 2 Amplificador InversorDocumento5 páginasPráctica 2 Amplificador Inversorerwin julian silva duarteAún no hay calificaciones
- IT144 Lab9. Amp. OperacionalDocumento5 páginasIT144 Lab9. Amp. OperacionalJorgeGonzalesAún no hay calificaciones
- AlmuerzoDocumento10 páginasAlmuerzoGeorge McDani Villca BautistaAún no hay calificaciones
- Informe ContadorDocumento3 páginasInforme ContadorAlejandro MontoyaAún no hay calificaciones
- P2 LopezDocumento6 páginasP2 LopezRicardo RomeroAún no hay calificaciones
- Práctica 2 - Amplificador InversorDocumento2 páginasPráctica 2 - Amplificador Inversorerwin julian silva duarteAún no hay calificaciones
- Clase D ToeDocumento10 páginasClase D ToeKevin Medina VillagomezAún no hay calificaciones
- IT144 Lab. 8Documento5 páginasIT144 Lab. 8RaiLeonAún no hay calificaciones
- Preguntas de Teoría para El Examen y PruebaDocumento4 páginasPreguntas de Teoría para El Examen y PruebapabloAún no hay calificaciones
- Trabajo Final Experiencia 1Documento22 páginasTrabajo Final Experiencia 1Vladimir Gonzales TaipeAún no hay calificaciones
- Amplificador Operacional Parte 2 de 2.Documento15 páginasAmplificador Operacional Parte 2 de 2.Alberto Riobo IglesiasAún no hay calificaciones
- IT144 8 Lab. Amp - DiferencialDocumento4 páginasIT144 8 Lab. Amp - DiferencialAnonymous b7znLVAún no hay calificaciones
- Lce1p6b Inv06Documento3 páginasLce1p6b Inv06RAMON ELIZARRARASAún no hay calificaciones
- Laboratorio Nro 1 - Amplificador DiferencialDocumento7 páginasLaboratorio Nro 1 - Amplificador DiferencialGustavo La Madrid100% (1)
- Practica 5Documento2 páginasPractica 5Rodolfo RamirezAún no hay calificaciones
- Labo 2 ControlDocumento7 páginasLabo 2 ControlFreddyGutierrezAún no hay calificaciones
- EE428 Lab4 Fuentes Reguladas ICDocumento3 páginasEE428 Lab4 Fuentes Reguladas ICDIEGO JOSUE MATHEUS MIRANDAAún no hay calificaciones
- Practica 3 Hector MartinezDocumento21 páginasPractica 3 Hector MartinezHéctor J. MartínezAún no hay calificaciones
- CLVR FichaDocumento2 páginasCLVR FichaJhuan MarkezAún no hay calificaciones
- Exp2b PDFDocumento6 páginasExp2b PDFJosuéChavarríaFAún no hay calificaciones
- Aplicaciones Del OpamDocumento5 páginasAplicaciones Del OpamWilson De La Cruz Jr.Aún no hay calificaciones
- Estruct. de Entrega de SimulacionesDocumento1 páginaEstruct. de Entrega de SimulacionesIleana Siqueiros ArceoAún no hay calificaciones
- Informe Labo6Documento7 páginasInforme Labo6Emanuel CrespoAún no hay calificaciones
- Exp 1 Conf AODocumento3 páginasExp 1 Conf AOJosé Orlando Pérez CisternasAún no hay calificaciones
- MS Sist Circ 5Documento1 páginaMS Sist Circ 5letito bert 1Aún no hay calificaciones
- Experimento 1Documento7 páginasExperimento 1Pedro ChavarriaAún no hay calificaciones
- 8-11 Servomecanismo Con Motor de Corriente DirectaDocumento3 páginas8-11 Servomecanismo Con Motor de Corriente DirectaGARY GABRIEL RAMOS PASTRANAAún no hay calificaciones
- PRE5Documento6 páginasPRE5qwer33Aún no hay calificaciones
- Laboratorio Fet ..Documento4 páginasLaboratorio Fet ..Estrella CarolinqAún no hay calificaciones
- A Guias de Laboratorio 1Documento21 páginasA Guias de Laboratorio 1Adrian LfnsAún no hay calificaciones
- Microelectronics - Circuit - Analysis - and - de (1) - 1-1000-499-1000 (151-200) .En - EsDocumento50 páginasMicroelectronics - Circuit - Analysis - and - de (1) - 1-1000-499-1000 (151-200) .En - EsAndres Rojas BalvinAún no hay calificaciones
- HW 6Documento3 páginasHW 6holaAún no hay calificaciones
- Capitulo 06 Convertidores AC-AC v1Documento34 páginasCapitulo 06 Convertidores AC-AC v1Andrés ToroAún no hay calificaciones
- Master Tema 2A Electrónica IndustrialDocumento13 páginasMaster Tema 2A Electrónica Industrialrafagares9Aún no hay calificaciones
- Astrid Zoro - 1Documento2 páginasAstrid Zoro - 1Daniel DuranAún no hay calificaciones
- Una GallinaDocumento1 páginaUna GallinaDaniel DuranAún no hay calificaciones
- La Crisi Que Afecta A ColombiaDocumento10 páginasLa Crisi Que Afecta A ColombiaDaniel DuranAún no hay calificaciones
- Simuladores Fisicos FVDocumento25 páginasSimuladores Fisicos FVDaniel DuranAún no hay calificaciones
- Simuladores de Fisica DIDocumento24 páginasSimuladores de Fisica DIDaniel DuranAún no hay calificaciones
- File PDFDocumento22 páginasFile PDFIvanunniAún no hay calificaciones
- Sistemas Lógicos: (Álgebra de Boole)Documento2 páginasSistemas Lógicos: (Álgebra de Boole)Arturo MendozaAún no hay calificaciones
- Control ModelamientoDocumento10 páginasControl ModelamientoEmerson Otálora DíazAún no hay calificaciones
- Control (Matlab)Documento13 páginasControl (Matlab)Daniel DuranAún no hay calificaciones
- RI002795Documento129 páginasRI002795Daniel DuranAún no hay calificaciones
- Modelamientos PDFDocumento71 páginasModelamientos PDFDaniel DuranAún no hay calificaciones
- Control Amp OpDocumento5 páginasControl Amp OpDaniel DuranAún no hay calificaciones
- informe-PRACTICA 6 MOVIMIENTO PARABOLICODocumento12 páginasinforme-PRACTICA 6 MOVIMIENTO PARABOLICORobinson ChanoAún no hay calificaciones
- 2 PP Nme3 2016 Torque y ReaccionesDocumento5 páginas2 PP Nme3 2016 Torque y ReaccionesrogalenzAún no hay calificaciones
- Ensayo Mecanica de FluidosDocumento5 páginasEnsayo Mecanica de FluidosKaterinne NuñezAún no hay calificaciones
- Elementos Estructurales Firme Parte 1Documento13 páginasElementos Estructurales Firme Parte 1blakacyto18100% (1)
- Guia de Fisica 2Documento22 páginasGuia de Fisica 2dios009Aún no hay calificaciones
- DIAPOSDocumento25 páginasDIAPOSjorge luisAún no hay calificaciones
- Bomba de CalorDocumento7 páginasBomba de CalorHector GarciaAún no hay calificaciones
- Enlace Metálico y Teoría de BandasDocumento6 páginasEnlace Metálico y Teoría de BandasWillyAún no hay calificaciones
- Clase 5.ppt - 20231107 - 102612 - 0000Documento42 páginasClase 5.ppt - 20231107 - 102612 - 0000Helen Carolina Chiappa LópezAún no hay calificaciones
- Guía de Ejercicios Química General I 2012 PDFDocumento91 páginasGuía de Ejercicios Química General I 2012 PDFDiego Gaston Enrich0% (1)
- Instrumentos Optométricos APUNTESDocumento52 páginasInstrumentos Optométricos APUNTESTyler marcial NtutumuAún no hay calificaciones
- Protocolo de Determinación de Kps de Ca (OH) 2-2Documento28 páginasProtocolo de Determinación de Kps de Ca (OH) 2-2Tania GachusAún no hay calificaciones
- TP 07 Conservacion de La Energía 2022Documento4 páginasTP 07 Conservacion de La Energía 2022Fabiana Luz YampeAún no hay calificaciones
- Zuncho-15 (SP) 2Documento36 páginasZuncho-15 (SP) 2Deanie MonterreyAún no hay calificaciones
- Diseño de Vigas Doblemente ReforzadasDocumento4 páginasDiseño de Vigas Doblemente ReforzadasernestoAún no hay calificaciones
- Resumen Física 2.0Documento8 páginasResumen Física 2.0micaelaAún no hay calificaciones
- Generalización de La Segunda Ley de NewtonDocumento23 páginasGeneralización de La Segunda Ley de NewtonBlanquis de EnriquezAún no hay calificaciones
- HeladasDocumento5 páginasHeladasZenaida Choque CarrascoAún no hay calificaciones
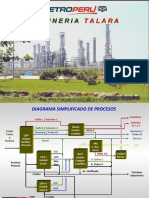
- Presentación Refinería TalaraDocumento68 páginasPresentación Refinería TalaraAlexis SánchezAún no hay calificaciones
- FIsica II - Anexo - Cuadernillo de Actividades - CompressedDocumento71 páginasFIsica II - Anexo - Cuadernillo de Actividades - CompressedJhonny Uchiha50% (2)
- Yacimiento Gas SecoDocumento3 páginasYacimiento Gas SecoING.PET100% (1)
- InhibiciónDocumento125 páginasInhibiciónOrlando Tatis RangelAún no hay calificaciones
- Rueda de MaxwellDocumento11 páginasRueda de MaxwellJuan Espinoza ConisllaAún no hay calificaciones
- Enlace 1Documento2 páginasEnlace 1Edson Luis Egusquiza CordovaAún no hay calificaciones
- CTA 2 Lectura 3 Procesamiento Térmico y Destrucción Microbiana PDFDocumento5 páginasCTA 2 Lectura 3 Procesamiento Térmico y Destrucción Microbiana PDFclaudia serranoAún no hay calificaciones
- Porcentaje de Inclusión en Concretos ExpuestosDocumento8 páginasPorcentaje de Inclusión en Concretos ExpuestosDaniel Marquez100% (1)
- Constantes Elásticas. Parte 1 PDFDocumento17 páginasConstantes Elásticas. Parte 1 PDFMaferVázquezBautistaAún no hay calificaciones
- Actividad 1.3Documento4 páginasActividad 1.3ADOLFO HERNANDEZ CORTINAAún no hay calificaciones
- Primer Examen Sustitutorio de Operaciones Unitariaa Grupo D 2021Documento4 páginasPrimer Examen Sustitutorio de Operaciones Unitariaa Grupo D 2021ALEJANDRO ALONSO OCHOA VARGASAún no hay calificaciones
- El Espectro ElectromagnéticoDocumento3 páginasEl Espectro ElectromagnéticoIvan RuizAún no hay calificaciones