También podría gustarte
- Lab4 Control 2 PDFDocumento7 páginasLab4 Control 2 PDFMatthiasSibrianAún no hay calificaciones
- Plantilla Formato Ensayo IEEEDocumento3 páginasPlantilla Formato Ensayo IEEEMatthiasSibrianAún no hay calificaciones
- HT 4Documento3 páginasHT 4MatthiasSibrianAún no hay calificaciones
- Plantilla Formato Ensayo IEEEDocumento3 páginasPlantilla Formato Ensayo IEEEMatthiasSibrianAún no hay calificaciones
- Laboratorio 7: Rastreo de Referencias Mediante Control IntegralDocumento2 páginasLaboratorio 7: Rastreo de Referencias Mediante Control IntegralMatthiasSibrianAún no hay calificaciones
- Hoja 1 IMEDocumento1 páginaHoja 1 IMEMatthiasSibrianAún no hay calificaciones
- HT 4Documento3 páginasHT 4MatthiasSibrianAún no hay calificaciones
- Laboratorio 7: Rastreo de Referencias Mediante Control IntegralDocumento2 páginasLaboratorio 7: Rastreo de Referencias Mediante Control IntegralMatthiasSibrianAún no hay calificaciones
- LDocumento3 páginasLMatthiasSibrianAún no hay calificaciones
- Laboratorio 3: Estabilidad y Respuesta en El Tiempo: Christopher Jenatz (16172) y Matthias Sibrian (16247)Documento13 páginasLaboratorio 3: Estabilidad y Respuesta en El Tiempo: Christopher Jenatz (16172) y Matthias Sibrian (16247)MatthiasSibrianAún no hay calificaciones
- Práctica 3Documento20 páginasPráctica 3MatthiasSibrianAún no hay calificaciones
- Investigación Grupo2Documento4 páginasInvestigación Grupo2MatthiasSibrianAún no hay calificaciones
- TDocumento9 páginasTMatthiasSibrianAún no hay calificaciones
- Inv 1Documento6 páginasInv 1MatthiasSibrianAún no hay calificaciones
- Grupo 10 - Semana 14Documento46 páginasGrupo 10 - Semana 14Rakel GHAún no hay calificaciones
- Página Principal Psicología Informe Test Del ÁrbolDocumento8 páginasPágina Principal Psicología Informe Test Del ÁrbolAbigail RodríguezAún no hay calificaciones
- Trabajo Final Orientacion VocacionalDocumento10 páginasTrabajo Final Orientacion VocacionalYenny Mendez BenítezAún no hay calificaciones
- Liderazgo y Maquiavelismo v2Documento8 páginasLiderazgo y Maquiavelismo v2samuel matosAún no hay calificaciones
- 10 Leyes de AtraccionDocumento5 páginas10 Leyes de Atraccion195jecerAún no hay calificaciones
- 01 E.T. de AgregadosDocumento6 páginas01 E.T. de AgregadosDONATO CESPEDES RAMOSAún no hay calificaciones
- AN 2022-2-21 Tarea 3 Punto Fijo y Newton Raphson-Terán Castillo Daniela Sofía PDFDocumento13 páginasAN 2022-2-21 Tarea 3 Punto Fijo y Newton Raphson-Terán Castillo Daniela Sofía PDFBarev ArrajAún no hay calificaciones
- Ciencias Sociales y Salud en México Movimientos Fundacionales y Desarrollos ActualesDocumento4 páginasCiencias Sociales y Salud en México Movimientos Fundacionales y Desarrollos ActualesCarlos VidalAún no hay calificaciones
- Actividad - 1 - Grupo 212049 - 35Documento82 páginasActividad - 1 - Grupo 212049 - 35Jesus Fabian ArenasAún no hay calificaciones
- 21.06.historia ORGANIZACIÓN SOCIAL EN EL TAHUANTINSUYODocumento1 página21.06.historia ORGANIZACIÓN SOCIAL EN EL TAHUANTINSUYOFredy Inga QuispeAún no hay calificaciones
- Factores Geográficos, Culturales y Sociales en La Adquisición Del LenguajeDocumento13 páginasFactores Geográficos, Culturales y Sociales en La Adquisición Del Lenguajeѕ ω є є тAún no hay calificaciones
- BL01-Piedra de LuzDocumento1 páginaBL01-Piedra de LuzJesusSalamanca100% (1)
- Tema 8 El Modelado Del Relieve - 1Documento13 páginasTema 8 El Modelado Del Relieve - 1yejanro2Aún no hay calificaciones
- 2019 Adulto JovenDocumento8 páginas2019 Adulto Jovenangel leonAún no hay calificaciones
- Tratamiento y Reutilización de Aguas Grises Por Medio de PlantasDocumento14 páginasTratamiento y Reutilización de Aguas Grises Por Medio de PlantasDayana100% (1)
- P9-Movimiento ParabolicoDocumento8 páginasP9-Movimiento ParabolicoMatias Cabezas50% (2)
- Taller 2 (Componentes de La AI)Documento3 páginasTaller 2 (Componentes de La AI)Jose GarciaAún no hay calificaciones
- P. Ingles Prim 14 - 18 FebreroDocumento3 páginasP. Ingles Prim 14 - 18 FebreroRuben VzAún no hay calificaciones
- Tarea 6 Analisis de CasosDocumento7 páginasTarea 6 Analisis de CasosYarilin MarietteAún no hay calificaciones
- Anexo 1 Ejercicios y Formato Tarea 3 - 485Documento38 páginasAnexo 1 Ejercicios y Formato Tarea 3 - 485Paola CipaconAún no hay calificaciones
- HINTZE, Jorge - Administracion de EstructurasDocumento43 páginasHINTZE, Jorge - Administracion de EstructurasVicente RussoAún no hay calificaciones
- Introducción A La SociologíaDocumento67 páginasIntroducción A La SociologíaOstiaAún no hay calificaciones
- PB Assist JRDocumento4 páginasPB Assist JRXimena RiosAún no hay calificaciones
- El Arte de La Teoría SocialDocumento4 páginasEl Arte de La Teoría SocialDavid HurtadoAún no hay calificaciones
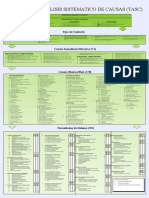
- Matriz TascDocumento1 páginaMatriz Tascbrigitte molinaAún no hay calificaciones
- Cotizacion Nueva de Redica Sin Acetona y QuitaesmalteDocumento1 páginaCotizacion Nueva de Redica Sin Acetona y Quitaesmalteirvin calixAún no hay calificaciones
- Folleto N #5 1er0 Basica Enero 2022Documento22 páginasFolleto N #5 1er0 Basica Enero 2022OSWALDO GUAYASAMINAún no hay calificaciones
- PRACTICA 3 Operaciones Unitarias Parte LLDocumento10 páginasPRACTICA 3 Operaciones Unitarias Parte LLitaliasanchezcruz29Aún no hay calificaciones
- Antecedentes Históricos de La NeumáticaDocumento17 páginasAntecedentes Históricos de La NeumáticaRamón Ayala100% (3)
- SEM 11 Ejercicios en Clase ED 2022-2Documento3 páginasSEM 11 Ejercicios en Clase ED 2022-2Richard Loor100% (1)