También podría gustarte
- Manual en Español de Pirometro CH102Documento10 páginasManual en Español de Pirometro CH102Espinoza Jose67% (3)
- Variadores CFW - 09 WEG ManualDocumento292 páginasVariadores CFW - 09 WEG Manualangel_goyés0% (1)
- Tablas Rapidas DanfossDocumento204 páginasTablas Rapidas Danfosscarlos50Aún no hay calificaciones
- Reglas Ziegler-Nichols sintonizar PIDDocumento11 páginasReglas Ziegler-Nichols sintonizar PIDAdrianRmzAún no hay calificaciones
- Control PID para Impresora 3D Ziegler NicholsDocumento6 páginasControl PID para Impresora 3D Ziegler NicholsrichideathAún no hay calificaciones
- Unidad V 2019 - Reactores en Estado No Estacionario (Batch, Semibatch, Arranque de CSTR) .Documento14 páginasUnidad V 2019 - Reactores en Estado No Estacionario (Batch, Semibatch, Arranque de CSTR) .ruth 1904Aún no hay calificaciones
- Catalogo Inverter 18 Seer Al Español04092017Documento7 páginasCatalogo Inverter 18 Seer Al Español04092017samuel vilaAún no hay calificaciones
- La Gestion Por ProcesosDocumento8 páginasLa Gestion Por ProcesosMario AvendañoAún no hay calificaciones
- GEA Compressor HA5: Instrucciones de MontajeDocumento32 páginasGEA Compressor HA5: Instrucciones de MontajePEDROAún no hay calificaciones
- Ekc 202 PDFDocumento16 páginasEkc 202 PDFJuan esteban Tobon giraldoAún no hay calificaciones
- Fundamentos DCDocumento41 páginasFundamentos DCPEDROAún no hay calificaciones
- 00001340energia NuclearDocumento34 páginas00001340energia NuclearPEDROAún no hay calificaciones
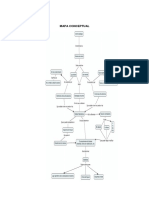
- Mapa Conceptual Unidad I y IIDocumento1 páginaMapa Conceptual Unidad I y IIPEDROAún no hay calificaciones
- Control Cuartos Fríos Ahorro 20Documento4 páginasControl Cuartos Fríos Ahorro 20makv12Aún no hay calificaciones
- NHPlus 20-120KVADocumento2 páginasNHPlus 20-120KVAPEDROAún no hay calificaciones
- Espectografo de MasaDocumento2 páginasEspectografo de MasaPEDROAún no hay calificaciones
- MODELODocumento12 páginasMODELOPEDROAún no hay calificaciones
- 13 Indice RefraccionDocumento3 páginas13 Indice RefraccionmeryAún no hay calificaciones
- W C 2 2011 IDocumento3 páginasW C 2 2011 IMabel MuñozAún no hay calificaciones
- Diseodecompensadores 2Documento43 páginasDiseodecompensadores 2PEDROAún no hay calificaciones
- Ppu 2010 PDFDocumento211 páginasPpu 2010 PDFPEDROAún no hay calificaciones
- Avanza 200709Documento12 páginasAvanza 200709Eliana Sofía Mayorga GiraldoAún no hay calificaciones
- Telematica Protocolo 2010 IDocumento63 páginasTelematica Protocolo 2010 IPEDROAún no hay calificaciones
- REGLAMENTOSDocumento2 páginasREGLAMENTOSPEDROAún no hay calificaciones
- Física de semiconductoresDocumento10 páginasFísica de semiconductoresPEDROAún no hay calificaciones
- 03-Fabricacion de Transistores BipolaresDocumento5 páginas03-Fabricacion de Transistores BipolaresManuel Rubin de CelisAún no hay calificaciones
- 03-Fabricacion de Transistores BipolaresDocumento5 páginas03-Fabricacion de Transistores BipolaresManuel Rubin de CelisAún no hay calificaciones
- Modulo Evaluacion de ProyectosDocumento142 páginasModulo Evaluacion de ProyectosJuank Perez80% (5)
- Física de SemiconductoresDocumento6 páginasFísica de SemiconductoresPEDROAún no hay calificaciones
- Fisica ModernaDocumento12 páginasFisica ModernaPEDROAún no hay calificaciones
- Mdiseno de Proyec.2011 1Documento121 páginasMdiseno de Proyec.2011 1Nuri Johana Nivia MontoyaAún no hay calificaciones
- Modulo Fisica de Semi Conduct OresDocumento138 páginasModulo Fisica de Semi Conduct OresisenambusAún no hay calificaciones
- Ajuste Y Sintonizacion de Lazos de Control PIDDocumento3 páginasAjuste Y Sintonizacion de Lazos de Control PIDEmil JimenezAún no hay calificaciones
- Control Pid RobustoDocumento18 páginasControl Pid RobustoFrancisco GomezAún no hay calificaciones
- Control PID: Análisis del comportamiento de procesos con controlador PIDDocumento6 páginasControl PID: Análisis del comportamiento de procesos con controlador PIDluisAún no hay calificaciones
- InformeGeneral Incubadora PDFDocumento49 páginasInformeGeneral Incubadora PDFJ Clever Calizaya NeiraAún no hay calificaciones
- P7 Control8 CStation 4Documento14 páginasP7 Control8 CStation 4MiguelAngelGutierrezAún no hay calificaciones
- Control de nivel y caudal con PIDDocumento9 páginasControl de nivel y caudal con PIDwinweb89Aún no hay calificaciones
- Modulo Neumatico 5Documento25 páginasModulo Neumatico 5IvanZavaletaAún no hay calificaciones
- Taller Segundo Corte Tópicos Avanzados de ControlDocumento5 páginasTaller Segundo Corte Tópicos Avanzados de ControlJhon RodriguezAún no hay calificaciones
- Proyecto de Control AnalogoDocumento24 páginasProyecto de Control AnalogoMónik TelloAún no hay calificaciones
- Automatismo Control LecturaDocumento35 páginasAutomatismo Control LecturaMiguel Ángel SánchezAún no hay calificaciones
- Control PID temperatura ArduinoDocumento7 páginasControl PID temperatura ArduinoSalimAún no hay calificaciones
- Control PIDDocumento26 páginasControl PIDCristian Gaspar GonzalesAún no hay calificaciones
- Construcción de un controlador PID con amplificadores operacionalesDocumento11 páginasConstrucción de un controlador PID con amplificadores operacionalesArnan N. MichelAún no hay calificaciones
- Unidad 4. Aplicaciones de ControlDocumento26 páginasUnidad 4. Aplicaciones de ControlArnold Vasquez0% (1)
- Sistema de Control de Temperatura PDFDocumento31 páginasSistema de Control de Temperatura PDFjonelss50% (2)
- Reporte Final Control DigitalDocumento23 páginasReporte Final Control DigitalHéctor Omar SanchezAún no hay calificaciones
- Control PDDocumento18 páginasControl PDsandimaAún no hay calificaciones
- Proyecto Final Sistema de ControlDocumento8 páginasProyecto Final Sistema de ControlChristian JJ BasalduaAún no hay calificaciones
- Manual Contro Ltemperatura E5CKDocumento108 páginasManual Contro Ltemperatura E5CKalfonso100% (1)
- Pid ControllerDocumento13 páginasPid Controllerggggggggggg32Aún no hay calificaciones
- Identificacion de Sistemas Parte2Documento28 páginasIdentificacion de Sistemas Parte2omarAún no hay calificaciones
- Plan de TesisDocumento17 páginasPlan de TesisJimmy Pimentel CruzAún no hay calificaciones
- Act 7 Control DigitalDocumento6 páginasAct 7 Control DigitalGysell CuellarAún no hay calificaciones
- Taller 3 Inst Sem 1 2019Documento4 páginasTaller 3 Inst Sem 1 2019Alexander ReinaAún no hay calificaciones
- Control Clasico-Tema 1Documento42 páginasControl Clasico-Tema 1Joaquin SantesAún no hay calificaciones