También podría gustarte
- Catalogo Inverter 18 Seer Al Español04092017Documento7 páginasCatalogo Inverter 18 Seer Al Español04092017samuel vilaAún no hay calificaciones
- GEA Compressor HA5: Instrucciones de MontajeDocumento32 páginasGEA Compressor HA5: Instrucciones de MontajePEDROAún no hay calificaciones
- Fundamentos DCDocumento41 páginasFundamentos DCPEDROAún no hay calificaciones
- Ekc 202 PDFDocumento16 páginasEkc 202 PDFJuan esteban Tobon giraldoAún no hay calificaciones
- Tablas Rapidas DanfossDocumento204 páginasTablas Rapidas Danfosscarlos50Aún no hay calificaciones
- Control Cuartos Fríos Ahorro 20Documento4 páginasControl Cuartos Fríos Ahorro 20makv12Aún no hay calificaciones
- NHPlus 20-120KVADocumento2 páginasNHPlus 20-120KVAPEDROAún no hay calificaciones
- 00001340energia NuclearDocumento34 páginas00001340energia NuclearPEDROAún no hay calificaciones
- Control Analogico Act 2Documento6 páginasControl Analogico Act 2PEDROAún no hay calificaciones
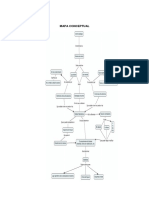
- Mapa Conceptual Unidad I y IIDocumento1 páginaMapa Conceptual Unidad I y IIPEDROAún no hay calificaciones
- La Gestion Por ProcesosDocumento8 páginasLa Gestion Por ProcesosMario AvendañoAún no hay calificaciones
- MODELODocumento12 páginasMODELOPEDROAún no hay calificaciones
- Espectografo de MasaDocumento2 páginasEspectografo de MasaPEDROAún no hay calificaciones
- 13 Indice RefraccionDocumento3 páginas13 Indice RefraccionmeryAún no hay calificaciones
- REGLAMENTOSDocumento2 páginasREGLAMENTOSPEDROAún no hay calificaciones
- Ppu 2010 PDFDocumento211 páginasPpu 2010 PDFPEDROAún no hay calificaciones
- W C 2 2011 IDocumento3 páginasW C 2 2011 IMabel MuñozAún no hay calificaciones
- Telematica Protocolo 2010 IDocumento63 páginasTelematica Protocolo 2010 IPEDROAún no hay calificaciones
- Física de semiconductoresDocumento10 páginasFísica de semiconductoresPEDROAún no hay calificaciones
- Avanza 200709Documento12 páginasAvanza 200709Eliana Sofía Mayorga GiraldoAún no hay calificaciones
- 03-Fabricacion de Transistores BipolaresDocumento5 páginas03-Fabricacion de Transistores BipolaresManuel Rubin de CelisAún no hay calificaciones
- Física de SemiconductoresDocumento6 páginasFísica de SemiconductoresPEDROAún no hay calificaciones
- Modulo Fisica de Semi Conduct OresDocumento138 páginasModulo Fisica de Semi Conduct OresisenambusAún no hay calificaciones
- Fisica ModernaDocumento12 páginasFisica ModernaPEDROAún no hay calificaciones
- Modulo Evaluacion de ProyectosDocumento142 páginasModulo Evaluacion de ProyectosJuank Perez80% (5)
- 03-Fabricacion de Transistores BipolaresDocumento5 páginas03-Fabricacion de Transistores BipolaresManuel Rubin de CelisAún no hay calificaciones
- Mdiseno de Proyec.2011 1Documento121 páginasMdiseno de Proyec.2011 1Nuri Johana Nivia MontoyaAún no hay calificaciones
- Plan Casero Dolor MuscularDocumento2 páginasPlan Casero Dolor Muscularkatherin contreras garciaAún no hay calificaciones
- 08 Cuadro de Identificación - Noticias Falsas (1) ResueltoDocumento2 páginas08 Cuadro de Identificación - Noticias Falsas (1) ResueltoMay Couoh Carlos AlfredoAún no hay calificaciones
- Cartilla Metodología Planes de Comunas y Corregimientos 2020-2023pdfDocumento23 páginasCartilla Metodología Planes de Comunas y Corregimientos 2020-2023pdfJuan GuzmánAún no hay calificaciones
- Empresa NubankDocumento6 páginasEmpresa NubankJair TortoneAún no hay calificaciones
- Trabajo FinalDocumento51 páginasTrabajo FinalIván SobrevillaAún no hay calificaciones
- Calendario de vacunación equina por paísDocumento1 páginaCalendario de vacunación equina por paísGianina Sailema100% (1)
- Crudo Maya 1Documento11 páginasCrudo Maya 1sinatra182Aún no hay calificaciones
- Ejemplo 1: Evaluacion AmbientalDocumento7 páginasEjemplo 1: Evaluacion AmbientalLaura RiveraAún no hay calificaciones
- ACERERIA Y CLASIFICACION JDDocumento10 páginasACERERIA Y CLASIFICACION JDjudithAún no hay calificaciones
- Plan de Entrenamiento de 4 SemanasDocumento6 páginasPlan de Entrenamiento de 4 SemanasCarlos Mejias RabalAún no hay calificaciones
- Actividad de Aprendizaje 2 (Juan Vesga)Documento3 páginasActividad de Aprendizaje 2 (Juan Vesga)JuanAún no hay calificaciones
- Listas vectores cadenas caracteres taller programación fundamentos sistemas ingenieríaDocumento3 páginasListas vectores cadenas caracteres taller programación fundamentos sistemas ingenieríaFabio OcAún no hay calificaciones
- Recetas Dieta DukanDocumento16 páginasRecetas Dieta DukanCati MarcanoAún no hay calificaciones
- TORNILLODocumento25 páginasTORNILLOMiiiki LopezAún no hay calificaciones
- AspiradoraDocumento2 páginasAspiradoraAida VillarrealAún no hay calificaciones
- Com Pres IbleDocumento24 páginasCom Pres IbleJose WuAún no hay calificaciones
- 2.16 Gruas y Equipos de IzajeDocumento24 páginas2.16 Gruas y Equipos de IzajeMiguel Leon RiveraAún no hay calificaciones
- El Pollo A La BrasaDocumento12 páginasEl Pollo A La BrasaMaritza ChoqueAún no hay calificaciones
- Ventajas y DesventajasDocumento1 páginaVentajas y DesventajasAlan imanol Mendoza hernandezAún no hay calificaciones
- 1.3. Etapas Del Analisis QuimicoDocumento32 páginas1.3. Etapas Del Analisis QuimicoSofía Domínguez GonzálezAún no hay calificaciones
- El Proceso de La Toma de DecisionesDocumento6 páginasEl Proceso de La Toma de DecisionesMariana RojasAún no hay calificaciones
- NL 20170402Documento52 páginasNL 20170402Markos G. YanaParedesAún no hay calificaciones
- Guía Proyecto Fin de GradoDocumento5 páginasGuía Proyecto Fin de GradoDelvin NodarseAún no hay calificaciones
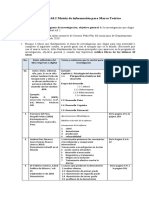
- A8.2 Guía Matriz Información Marco Teórico - 1Documento2 páginasA8.2 Guía Matriz Información Marco Teórico - 1Evelyn OrdoñezAún no hay calificaciones
- Salud Ocupacional Pregustas JDocumento5 páginasSalud Ocupacional Pregustas JJhon Bairon MERCADO ACOSTAAún no hay calificaciones
- Mapa Mental ProtozoosDocumento1 páginaMapa Mental ProtozoosJorge Andres RodriguezAún no hay calificaciones
- Exposicion Las Hortalizas 150602214940 Lva1 App6892Documento16 páginasExposicion Las Hortalizas 150602214940 Lva1 App6892Johana RamosAún no hay calificaciones
- Escala Reserva CognitivaDocumento8 páginasEscala Reserva CognitivaCarmelaELAún no hay calificaciones
- Topónimos de Origen Nahuatl en El Distrito FederalDocumento178 páginasTopónimos de Origen Nahuatl en El Distrito FederalOscar Rene Gonzalez Lopez100% (1)
- Policia Preventiva Y ComunitariaDocumento4 páginasPolicia Preventiva Y ComunitariaGenesis VillacresAún no hay calificaciones