También podría gustarte
- Problemas resueltos de electromagnetismo. Volumen I: ElectrostáticaDe EverandProblemas resueltos de electromagnetismo. Volumen I: ElectrostáticaAún no hay calificaciones
- Cap1 Vectores en El PlanoDocumento15 páginasCap1 Vectores en El PlanodylanAún no hay calificaciones
- Guia de Fisica 1Documento72 páginasGuia de Fisica 1Francisco SanvicenteAún no hay calificaciones
- Gráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraDe EverandGráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraAún no hay calificaciones
- Fisica VectoresDocumento17 páginasFisica VectoresMiguel MuñozAún no hay calificaciones
- VectoresDocumento15 páginasVectoresJulio Enrique DuarteAún no hay calificaciones
- 12clase Vectores Fisica GeneralDocumento14 páginas12clase Vectores Fisica Generalkyoto 456Aún no hay calificaciones
- Unidad 2. Cantidades Escalares y Vectoriales - SADocumento33 páginasUnidad 2. Cantidades Escalares y Vectoriales - SADarkn UsAún no hay calificaciones
- Vectores y FuerzasDocumento11 páginasVectores y FuerzasAngel Nava100% (1)
- S01.s2 - Vectores IDocumento26 páginasS01.s2 - Vectores IDany Sandoval NimaAún no hay calificaciones
- Uc2 Manual de MecanicaDocumento15 páginasUc2 Manual de MecanicaAngel Escudero0% (1)
- Cap1 Vectores en El PlanoDocumento23 páginasCap1 Vectores en El Planoramirex7Aún no hay calificaciones
- VectoresDocumento7 páginasVectoresMohammed BenabdelkaderAún no hay calificaciones
- C OperadorDocumento198 páginasC OperadorRenzo A Chero100% (2)
- 4° Secundaria - Material FísicaDocumento24 páginas4° Secundaria - Material FísicaBeto Orlando Yucra SaraAún no hay calificaciones
- Vectores Teoria 2022Documento35 páginasVectores Teoria 2022Jhon CLAún no hay calificaciones
- Apuntes de Vectores (1) 2Documento6 páginasApuntes de Vectores (1) 2De Neira Carolina IbaniaAún no hay calificaciones
- VECTORESDocumento7 páginasVECTORESOmar Leonardo Gaitan OrtegaAún no hay calificaciones
- 1.1 Guía 2. VectoresDocumento6 páginas1.1 Guía 2. VectoresAntonyFredyGarciaAún no hay calificaciones
- Capitulo 2 - Vectores en El Espacio-2022Documento21 páginasCapitulo 2 - Vectores en El Espacio-2022Merli RomeroAún no hay calificaciones
- Cinemática y Dinámica de Partículas: Ing. Francisco MerinoDocumento39 páginasCinemática y Dinámica de Partículas: Ing. Francisco MerinoSteven FrancoAún no hay calificaciones
- Unidad IDocumento26 páginasUnidad IJessica SalgueroAún no hay calificaciones
- Algebra Vectorial (UTN Pacheco)Documento11 páginasAlgebra Vectorial (UTN Pacheco)Casa GubrielsAún no hay calificaciones
- Sesión 1Documento21 páginasSesión 1Luis David Inca ApazaAún no hay calificaciones
- T0 Vectores CinematicaDocumento11 páginasT0 Vectores CinematicarakelarausAún no hay calificaciones
- Suma y Resta de Vectores UCE EstudioDocumento7 páginasSuma y Resta de Vectores UCE EstudioEmily LopezAún no hay calificaciones
- Clase 26 - 28Documento41 páginasClase 26 - 28Alexita ArmijosAún no hay calificaciones
- T0 Vect CinDocumento16 páginasT0 Vect CinJuanLoredoAún no hay calificaciones
- Clase 1 2223 1 DefDocumento48 páginasClase 1 2223 1 DefLeonardo DelgadoAún no hay calificaciones
- 3.1. Vectores en R 2.V.5Documento35 páginas3.1. Vectores en R 2.V.5felix mendozaAún no hay calificaciones
- Presentacion VectoresDocumento72 páginasPresentacion VectoresLoany ReyesAún no hay calificaciones
- Unidad Ii VectoresbDocumento17 páginasUnidad Ii VectoresbVan FranjaiAún no hay calificaciones
- Cantidades Escalares y VectorialesDocumento32 páginasCantidades Escalares y VectorialesBenjamín Alfonso Valdez SalinasAún no hay calificaciones
- Unidad Ii: VectoresDocumento37 páginasUnidad Ii: VectoresJose SalazarAún no hay calificaciones
- Explicación Vectores R3Documento16 páginasExplicación Vectores R3Héctor MolinaAún no hay calificaciones
- CURSO DE FISICA I 2014 Durante El ParoDocumento12 páginasCURSO DE FISICA I 2014 Durante El ParoDiseño Web Profesional & Sistemas De SeguridadAún no hay calificaciones
- Guía No. 2 - VECTORES - Capítulo 3 de SerwayDocumento7 páginasGuía No. 2 - VECTORES - Capítulo 3 de SerwayNALLI LOPEZ BYRON STEVENAún no hay calificaciones
- 02 - VectoresDocumento40 páginas02 - VectoresSaúl OrtizAún no hay calificaciones
- Cap.1 (Vectores) PDFDocumento13 páginasCap.1 (Vectores) PDFSantiago CabAlleroAún no hay calificaciones
- Movimiento en Una Dirección, Magnitudes Vectoriales y Operaciones Con VectoresDocumento5 páginasMovimiento en Una Dirección, Magnitudes Vectoriales y Operaciones Con VectoresJuan GranadosAún no hay calificaciones
- Anual Uni-Semana 02 FísicaDocumento24 páginasAnual Uni-Semana 02 FísicaAlexander Villanueva HuamaniAún no hay calificaciones
- Segunda Guia de VectoresDocumento5 páginasSegunda Guia de VectoreseverjamAún no hay calificaciones
- Nociones Básicas de Vectores en El PlanoDocumento40 páginasNociones Básicas de Vectores en El PlanoMiguel Condezo100% (1)
- 12-Vectores en El EspacioDocumento28 páginas12-Vectores en El EspacioCarlos RamírezAún no hay calificaciones
- Vectores 1Documento12 páginasVectores 1ALBERT HEMERSON ENCO COLQUEAún no hay calificaciones
- Clase 1Documento10 páginasClase 1unicinoAún no hay calificaciones
- M&E I - T3 - Cantiades Escalares y VectorialesDocumento15 páginasM&E I - T3 - Cantiades Escalares y VectorialesJan ArevaloAún no hay calificaciones
- Vectores 1570553085Documento38 páginasVectores 1570553085Edisson VelesacaAún no hay calificaciones
- 1 Vectores en El EspacioDocumento50 páginas1 Vectores en El EspacioOswaldo CázaresAún no hay calificaciones
- Interpretación Geométrica de Operaciones Con Vectores CompletoDocumento13 páginasInterpretación Geométrica de Operaciones Con Vectores CompletoIñaki LopezAún no hay calificaciones
- Resumen. Álgebra y Geometría AnalíticaDocumento25 páginasResumen. Álgebra y Geometría AnalíticaIara MartinelliAún no hay calificaciones
- AyGA - 2021 - Unidad N°1 - Álgebra VectorialDocumento10 páginasAyGA - 2021 - Unidad N°1 - Álgebra VectorialEmiliano BoggianoAún no hay calificaciones
- Vectores - Material Teórico PrácticoDocumento10 páginasVectores - Material Teórico PrácticoAna CamarottaAún no hay calificaciones
- Glosario 1. 1roalbDocumento51 páginasGlosario 1. 1roalbEvelyn LasluisaAún no hay calificaciones
- S03 S2-MaterialDocumento55 páginasS03 S2-MaterialGerson Perez VargasAún no hay calificaciones
- Semana 02Documento19 páginasSemana 02YESSENIA ANACELI FERNANDEZ REYESAún no hay calificaciones
- Sem1 - PPT - Vectores en R3..Documento32 páginasSem1 - PPT - Vectores en R3..malcommmAún no hay calificaciones
- Vector EsDocumento13 páginasVector EsjhonAún no hay calificaciones
- UntitledDocumento48 páginasUntitledJulio Vidal. Q.C.Aún no hay calificaciones
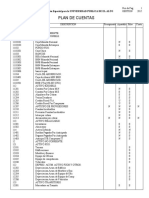
- Plan Cuentas OrionDocumento5 páginasPlan Cuentas Orionramirex7Aún no hay calificaciones
- Distribución BivarianteDocumento11 páginasDistribución Bivarianteramirex7100% (1)
- 10 Registro Asistencia Estudiantes CALC IDocumento1 página10 Registro Asistencia Estudiantes CALC Iramirex7Aún no hay calificaciones
- DerifisicaDocumento3 páginasDerifisicaramirex7Aún no hay calificaciones
- Crear CuentaDocumento3 páginasCrear Cuentaramirex7Aún no hay calificaciones
- Cap1 Vectores en El PlanoDocumento23 páginasCap1 Vectores en El Planoramirex7Aún no hay calificaciones
- Tema1 PDFDocumento14 páginasTema1 PDFramirex7Aún no hay calificaciones
- Muest RabiDocumento5 páginasMuest Rabiramirex7Aún no hay calificaciones
- PRÁCTICAfis 1 2 - 2018 PDFDocumento1 páginaPRÁCTICAfis 1 2 - 2018 PDFramirex7Aún no hay calificaciones
- PRÁCTICAfis 2Documento2 páginasPRÁCTICAfis 2ramirex70% (1)
- Tabla de Derivadas e IntegralesDocumento12 páginasTabla de Derivadas e Integralesramirex7Aún no hay calificaciones
- PRÁCTICAfis 1Documento2 páginasPRÁCTICAfis 1ramirex7Aún no hay calificaciones
- PromedioDocumento2 páginasPromedioalx JCAún no hay calificaciones
- Aplicaciones GeométricasDocumento4 páginasAplicaciones Geométricasjonnathan matuteAún no hay calificaciones
- Guia de Funciones Lineales PDFDocumento3 páginasGuia de Funciones Lineales PDFJosé0% (1)
- MateDocumento9 páginasMateAmelia RodriguezAún no hay calificaciones
- Unidad I - Mat para La EmpresaDocumento16 páginasUnidad I - Mat para La EmpresaAldo JavierAún no hay calificaciones
- Ayudantia 2 PautaDocumento5 páginasAyudantia 2 PautaJDMAAún no hay calificaciones
- Ecuaciones Diferenciales Estocásticas Aplicada A Finanzas PDFDocumento104 páginasEcuaciones Diferenciales Estocásticas Aplicada A Finanzas PDFjhonAún no hay calificaciones
- Recurrentes PDFDocumento29 páginasRecurrentes PDFJose HumireAún no hay calificaciones
- HJBJHGDocumento7 páginasHJBJHGDaniel BeltranAún no hay calificaciones
- Segundo Corte (1-3)Documento4 páginasSegundo Corte (1-3)die_golAún no hay calificaciones
- TRG 4B Sel 02 b4 s1-4 Teo AplicDocumento13 páginasTRG 4B Sel 02 b4 s1-4 Teo AplicBraulio Paolo jesús Machuca TacoAún no hay calificaciones
- Agradecimientos, Dedicatorias, Indices y DemasDocumento28 páginasAgradecimientos, Dedicatorias, Indices y DemasJose Luis T SAún no hay calificaciones
- Examen - AAB01 Cuestionario 1 - Funciones Límites y Sistemas de CoordenadasDocumento6 páginasExamen - AAB01 Cuestionario 1 - Funciones Límites y Sistemas de Coordenadasjonathan ojedaAún no hay calificaciones
- Capítulo 3 ALGEBRA DE BOOLEDocumento43 páginasCapítulo 3 ALGEBRA DE BOOLEFrancisco CorvalánAún no hay calificaciones
- III Evaluación SumativaDocumento6 páginasIII Evaluación SumativaAnonymous zkRqjWgAún no hay calificaciones
- Vectores EscalaresDocumento7 páginasVectores EscalaresWalter LópezAún no hay calificaciones
- 2 Bte Proyecto 6 Semana 2 MatemáticaDocumento5 páginas2 Bte Proyecto 6 Semana 2 Matemáticacarmen peñafiel chocaAún no hay calificaciones
- Trabajo de Análisis Matemático 1Documento49 páginasTrabajo de Análisis Matemático 1Neisser CaruajulcaAún no hay calificaciones
- Convertir Fracciones A DecimalDocumento28 páginasConvertir Fracciones A DecimalRox ReyesAún no hay calificaciones
- Clase 4 - PDocumento34 páginasClase 4 - PsainzAún no hay calificaciones
- Método de BairstowDocumento9 páginasMétodo de BairstowAngel MartinezAún no hay calificaciones
- Integración Por Fracciones ParcialesDocumento37 páginasIntegración Por Fracciones ParcialesJose AguilarAún no hay calificaciones
- APUNTES DE CAMPOS - Cap 1 y 2 PDFDocumento38 páginasAPUNTES DE CAMPOS - Cap 1 y 2 PDFIvan MonterreyAún no hay calificaciones
- Método Reducción de OrdenDocumento3 páginasMétodo Reducción de OrdenLuis MiguelAún no hay calificaciones
- UJAP CNU05405 02 Sistemas de Ecuaciones Lineales 2020ICRDocumento4 páginasUJAP CNU05405 02 Sistemas de Ecuaciones Lineales 2020ICRjajjajajjajajaAún no hay calificaciones
- Habilidades MatemáticasDocumento52 páginasHabilidades MatemáticasJUAN MANUEL FERNÁNDEZ RUIZAún no hay calificaciones
- Calculo DiferencialDocumento7 páginasCalculo DiferencialSanthosUhmAún no hay calificaciones
- Tarea de Propedeutico de Mat Unidad 1Documento8 páginasTarea de Propedeutico de Mat Unidad 1Víctor RodríguezAún no hay calificaciones
- Recurso Taller 1 - U1Documento2 páginasRecurso Taller 1 - U1Julian11Aún no hay calificaciones
- 07 Cc3a1lculo Vectorial Introduccion A Los Campos Vectoriales2Documento3 páginas07 Cc3a1lculo Vectorial Introduccion A Los Campos Vectoriales2Luvia Kon-SlambertAún no hay calificaciones