También podría gustarte
- Infografia Estructuralismo-FuncionalismoDocumento4 páginasInfografia Estructuralismo-Funcionalismopsicoeduc14100% (2)
- Tarea 4.1 Estrategias CompetitivasDocumento3 páginasTarea 4.1 Estrategias CompetitivasJhosselyne VelasquezAún no hay calificaciones
- Estructura Redes Multiplexadas PDFDocumento51 páginasEstructura Redes Multiplexadas PDFMiguel ruiz100% (3)
- Diagnostico Por Modo 6Documento53 páginasDiagnostico Por Modo 6Ramon Acosta100% (1)
- Información CAN Bus SEATDocumento30 páginasInformación CAN Bus SEATel_george007949167% (3)
- Diagnosis de Un Can Bus BMWDocumento6 páginasDiagnosis de Un Can Bus BMWjjossette11Aún no hay calificaciones
- Aprenda A Diagnosticar Un Red Can y Que Metodos Debes de EmplearDocumento3 páginasAprenda A Diagnosticar Un Red Can y Que Metodos Debes de EmplearJaimer Yersiño Riveros ReyesAún no hay calificaciones
- CAN BUS VW SPDocumento29 páginasCAN BUS VW SPIsmael Lenin Barahona LazoAún no hay calificaciones
- Sensor de CargaDocumento4 páginasSensor de CargaAMAL SAQRONIAún no hay calificaciones
- MultiplexadoDocumento28 páginasMultiplexadosebamaxiAún no hay calificaciones
- DTCS y MasDocumento55 páginasDTCS y MasOscar Villaseñor100% (1)
- 1911 ssp186 eDocumento30 páginas1911 ssp186 eJose Reiriz Garcia100% (1)
- Fallos Comues Red de Abordo VAGDocumento3 páginasFallos Comues Red de Abordo VAGTolo TerrasaAún no hay calificaciones
- Tiempo de InyeccionDocumento7 páginasTiempo de InyeccionMarcelo Rodriguez100% (2)
- Sensor VSS CaracteristicasDocumento1 páginaSensor VSS CaracteristicasRicky SantiagoAún no hay calificaciones
- Sistema de Comunicacion CAN BUSDocumento34 páginasSistema de Comunicacion CAN BUSManolo Castillo100% (1)
- Ajuste Basico DSGDocumento6 páginasAjuste Basico DSGNestor FidalgoAún no hay calificaciones
- Averías CAN-Bus TracciónDocumento23 páginasAverías CAN-Bus TracciónBj BenitezAún no hay calificaciones
- Reparacion CentralitaDocumento7 páginasReparacion CentralitaPatrick LopezAún no hay calificaciones
- Sistema Can BusDocumento29 páginasSistema Can BusDavid ParariAún no hay calificaciones
- Redes MultiplexadasDocumento15 páginasRedes MultiplexadasDagar GR0% (1)
- 2 Curso Can Bus y Tableros Digitales InternacionalDocumento2 páginas2 Curso Can Bus y Tableros Digitales InternacionalFreddy VillegasAún no hay calificaciones
- Cobertura Vedis Kit MexicoDocumento3 páginasCobertura Vedis Kit MexicoAutoland MexicoAún no hay calificaciones
- (On Board Diagnostic) : ¿Que Es El Obd?Documento12 páginas(On Board Diagnostic) : ¿Que Es El Obd?jcramosAún no hay calificaciones
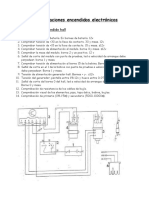
- Comprobaciones Encendidos ElectrónicosDocumento12 páginasComprobaciones Encendidos Electrónicososkar100% (5)
- Todo Can PDFDocumento41 páginasTodo Can PDFpacobu128Aún no hay calificaciones
- Multilpexado 3Documento21 páginasMultilpexado 3Patricio ValenciaAún no hay calificaciones
- Log Turbo y Caudalimetro TDI Con VAG-COMDocumento11 páginasLog Turbo y Caudalimetro TDI Con VAG-COMJose Cantero CastilloAún no hay calificaciones
- Curso Sistema Direccion Caracteristicas Arquitectura Historia Mecanismos TiposDocumento28 páginasCurso Sistema Direccion Caracteristicas Arquitectura Historia Mecanismos TipospedroAún no hay calificaciones
- Sicca AutomotrizDocumento54 páginasSicca Automotrizjuan100% (1)
- CAN VAN Bus GlosarioDocumento8 páginasCAN VAN Bus Glosarioapi-3850582100% (1)
- EncendidoDocumento69 páginasEncendidoEduardo Enrique Rojas ValenzuelaAún no hay calificaciones
- Encendido Electrc3b3nico PDFDocumento160 páginasEncendido Electrc3b3nico PDFRoger Martinez100% (1)
- Cise ElectronicDocumento38 páginasCise ElectronicWalter Puca100% (2)
- Pruebas de Banco BobinasDocumento12 páginasPruebas de Banco BobinasPablomst GomezAún no hay calificaciones
- Sensor CMPDocumento16 páginasSensor CMPRicardo Ignacio Muñoz SaldañaAún no hay calificaciones
- Monitoreo Del Sistema de CombustibleDocumento3 páginasMonitoreo Del Sistema de Combustiblelopezdestruction100% (1)
- 1 Incylinder EspañolDocumento5 páginas1 Incylinder EspañolRoger Ortega100% (1)
- Sonda de Oxigeno o Lambda de 1 2 y 3 CABLESDocumento8 páginasSonda de Oxigeno o Lambda de 1 2 y 3 CABLESNeida MorenoAún no hay calificaciones
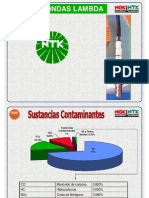
- Sonda LambdaDocumento17 páginasSonda LambdaKarlitosmanAún no hay calificaciones
- Grupo 2 - LinDocumento27 páginasGrupo 2 - LinDaniel Gomez100% (1)
- Sondas Lambda NTKDocumento43 páginasSondas Lambda NTKapi-3709675100% (3)
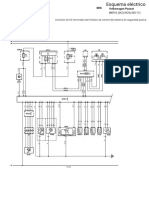
- Airbag Passat 2005Documento5 páginasAirbag Passat 2005jose angelAún no hay calificaciones
- Mariposa MotorizadaDocumento25 páginasMariposa MotorizadaFacu Pravos100% (1)
- Notas de Forma de Onda de Encendido Bujias BobinasDocumento7 páginasNotas de Forma de Onda de Encendido Bujias Bobinasjuan carlos cabreraAún no hay calificaciones
- Prueba Del Sensor de TemperaturaDocumento5 páginasPrueba Del Sensor de TemperaturaHerberPerazaAún no hay calificaciones
- CAN-Bus - Ion Del InstructorDocumento42 páginasCAN-Bus - Ion Del Instructorapi-3850582100% (12)
- Posicionado y control de la estructura en bancada. TMVL0309De EverandPosicionado y control de la estructura en bancada. TMVL0309Aún no hay calificaciones
- Diagnostico Can BusDocumento9 páginasDiagnostico Can BusJoaquin Moliner AguilonAún no hay calificaciones
- Diagnosticar Un Red CANDocumento10 páginasDiagnosticar Un Red CANLopez Maciel100% (2)
- Cómo Diagnosticar Un Red CAN y Qué Método EmplearDocumento10 páginasCómo Diagnosticar Un Red CAN y Qué Método EmplearARAMNDO GALVAN100% (1)
- Diagnostic Can 1Documento5 páginasDiagnostic Can 1julio montenegroAún no hay calificaciones
- Documento 1Documento27 páginasDocumento 1german hdez100% (1)
- Can BusDocumento6 páginasCan BusJosé Rodriguez100% (1)
- Diagnosis CAN BUS, Paso A Paso. - Diagnosis TipsDocumento18 páginasDiagnosis CAN BUS, Paso A Paso. - Diagnosis TipsAndrés Alejandro Pereira100% (3)
- Redes Can BusDocumento17 páginasRedes Can BusmarceloAún no hay calificaciones
- Fallas Red CanDocumento3 páginasFallas Red Canangel100% (2)
- Can BusDocumento5 páginasCan BusJulian DavidAún no hay calificaciones
- Medicion Red Can y Van MutiplexadasDocumento23 páginasMedicion Red Can y Van MutiplexadasAndres Torres Cuvili100% (3)
- Señales Can High Can LowDocumento11 páginasSeñales Can High Can LowJIMMY CHUNG PAIMA100% (1)
- Ficha Tecnica Can BusDocumento8 páginasFicha Tecnica Can BusCarlos MamaniAún no hay calificaciones
- Deber3 GR5Documento7 páginasDeber3 GR5Dario Orosco OrozcoAún no hay calificaciones
- Carta Restaurante Los MarfilesDocumento12 páginasCarta Restaurante Los MarfilesjmarsaajosAún no hay calificaciones
- Técnicas de EstudioDocumento71 páginasTécnicas de EstudiojmarsaajosAún no hay calificaciones
- A IntroduccionDocumento7 páginasA IntroduccionjmarsaajosAún no hay calificaciones
- Alessandro Striggio El Joven, OrfeoDocumento10 páginasAlessandro Striggio El Joven, OrfeojmarsaajosAún no hay calificaciones
- Manual de Motores de Arranque y Alternadores - Batería y DiagnósticoDocumento20 páginasManual de Motores de Arranque y Alternadores - Batería y DiagnósticothiagotavoraAún no hay calificaciones
- La Electronica Del Automóvil. 2 FácilDocumento40 páginasLa Electronica Del Automóvil. 2 Fáciljmarsaajos100% (3)
- Funcionamiento Inyector PiezoeléctricoDocumento6 páginasFuncionamiento Inyector Piezoeléctricojmarsaajos50% (2)
- Alertas y Mantenimiento Motores BlueHDiDocumento38 páginasAlertas y Mantenimiento Motores BlueHDijmarsaajosAún no hay calificaciones
- Manejo de La Pinza AmperimétricaDocumento5 páginasManejo de La Pinza AmperimétricajmarsaajosAún no hay calificaciones
- La Electroválvula de Regulación de Caudal de Carburante Provoca Una Presión Raíl Demasiado ElevadaDocumento3 páginasLa Electroválvula de Regulación de Caudal de Carburante Provoca Una Presión Raíl Demasiado ElevadajmarsaajosAún no hay calificaciones
- I J KDocumento123 páginasI J KJulie MorrowAún no hay calificaciones
- Rigor Libor Algor MortisDocumento8 páginasRigor Libor Algor MortisJaz TTAún no hay calificaciones
- Compartir Carpeta Windows ServerDocumento22 páginasCompartir Carpeta Windows Serverricardo_g1973Aún no hay calificaciones
- Tarea 8 de Español 2Documento5 páginasTarea 8 de Español 2INVERSIONES RODRIGUEZ100% (2)
- Variaciones MorfologicasDocumento11 páginasVariaciones Morfologicasmajosdiz84Aún no hay calificaciones
- STC14705 2019Documento26 páginasSTC14705 2019Andrei BarraganAún no hay calificaciones
- 4° Básico A y B Lenguaje Material de Apoyo Unidad 1Documento2 páginas4° Básico A y B Lenguaje Material de Apoyo Unidad 1Elizabeth Montero CartesAún no hay calificaciones
- Procedimiento de Auditorias InternasDocumento16 páginasProcedimiento de Auditorias InternasYdram AjAún no hay calificaciones
- Deber CardamaDocumento21 páginasDeber CardamaWladimir BalsecaAún no hay calificaciones
- Clase 3. - Fisiología Del DolorDocumento3 páginasClase 3. - Fisiología Del DolorDiego PonceAún no hay calificaciones
- Modelado FMS AutomatasDocumento55 páginasModelado FMS AutomatasRubiany Gonzalez QuiñonezAún no hay calificaciones
- Designación de Cargos en El Pueblo de SarhuaDocumento7 páginasDesignación de Cargos en El Pueblo de SarhuaEduardo EvanánAún no hay calificaciones
- Seminario Extensión SentipensarDocumento14 páginasSeminario Extensión SentipensarMatías AhumadaAún no hay calificaciones
- Silabus de Defensa Nacional - UNPDocumento4 páginasSilabus de Defensa Nacional - UNPJenner Davis Ugaz RoaAún no hay calificaciones
- Lecturas para El Área de Matemática-SecundariaDocumento8 páginasLecturas para El Área de Matemática-Secundariac_enrique33742Aún no hay calificaciones
- Trenes TEILLIERDocumento51 páginasTrenes TEILLIERjorge jorge jorgeAún no hay calificaciones
- Practica Dirigida VariablesDocumento5 páginasPractica Dirigida VariablesJorge Iván PaEsAún no hay calificaciones
- Análisis Curricular Estudio Regional Comparativo y Explicativo (ERCE 2019)Documento43 páginasAnálisis Curricular Estudio Regional Comparativo y Explicativo (ERCE 2019)Juana MoraAún no hay calificaciones
- UCT - GESTIÓN POR RESULTADOS EN LA GESTIÓN PÚBLICA (Unidad II)Documento30 páginasUCT - GESTIÓN POR RESULTADOS EN LA GESTIÓN PÚBLICA (Unidad II)Carlos Eduardo Fuentes AdrianzénAún no hay calificaciones
- Reconocimiento Sílabas DirectasDocumento119 páginasReconocimiento Sílabas DirectasTany RodriguezAún no hay calificaciones
- La Mediación.Documento4 páginasLa Mediación.LUCIAAún no hay calificaciones
- Ejercicio Taller IO 2Documento4 páginasEjercicio Taller IO 2alvaro vargas caballeroAún no hay calificaciones
- Democracia en El CaribeDocumento17 páginasDemocracia en El CaribeChris Yunior RDAún no hay calificaciones
- Qué Es DivisibilidadDocumento7 páginasQué Es DivisibilidadMichael PeñaAún no hay calificaciones
- Terminaciones Nerviosas de LapielDocumento21 páginasTerminaciones Nerviosas de LapielHectorx sequeiraAún no hay calificaciones
- Ejercicio Panorama de RiesgosDocumento3 páginasEjercicio Panorama de RiesgosDiana MarcelaAún no hay calificaciones
- Caracterizacion de Los Procesos de Retroalimentacion en La Práctica DocenteDocumento14 páginasCaracterizacion de Los Procesos de Retroalimentacion en La Práctica DocenteAlexis Peñailillo ArceAún no hay calificaciones
- Reporte No. 1 (Perdida de Energia Por Friccion en Tuberias)Documento16 páginasReporte No. 1 (Perdida de Energia Por Friccion en Tuberias)tgu1eramosAún no hay calificaciones