También podría gustarte
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 1 de 5 estrellas1/5 (2)
- Cigüeñal Detroit (DDC15)Documento20 páginasCigüeñal Detroit (DDC15)JUAN ERNESTO BETANCUR OSORIO100% (5)
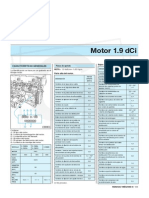
- Manual de Megane II - Motor 1.9 DciDocumento30 páginasManual de Megane II - Motor 1.9 Dcibrayanhorvathrozas91% (64)
- Reparación Del Sistema de Frenos NeumáticoDocumento148 páginasReparación Del Sistema de Frenos NeumáticoSDanielTorresPachas100% (7)
- Recirculación de gases de escape mediante sistemas de baja presión en motores diésel sobrealimentadosDe EverandRecirculación de gases de escape mediante sistemas de baja presión en motores diésel sobrealimentadosCalificación: 3 de 5 estrellas3/5 (3)
- Análisis de Fallas en Motores EléctricosDocumento23 páginasAnálisis de Fallas en Motores EléctricosJaviel SánchezAún no hay calificaciones
- BacklashDocumento2 páginasBacklashEdgardo Carrillo Navarro100% (7)
- Mrmotd4d D4FDocumento72 páginasMrmotd4d D4Fwjsalazar83% (18)
- Ensamble de Pistón y BielaDocumento24 páginasEnsamble de Pistón y Bielaluis100% (4)
- Curso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoDe EverandCurso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoAún no hay calificaciones
- Diseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaDe EverandDiseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaAún no hay calificaciones
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Aún no hay calificaciones
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorAún no hay calificaciones
- Curso moderno de máquinas eléctricas rotativas. Tomo I: La máquina eléctrica en generalDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo I: La máquina eléctrica en generalCalificación: 3 de 5 estrellas3/5 (2)
- Compresor Climatuff PartesDocumento24 páginasCompresor Climatuff PartesEduardo RodriguezAún no hay calificaciones
- Diseño de Banco Mecanico para El Armado de Motores LivianosDocumento46 páginasDiseño de Banco Mecanico para El Armado de Motores LivianosGuillermo Alexamder Sanchez YbañezAún no hay calificaciones
- 01-Motor - Multi Air 140 CV y 105 CVDocumento136 páginas01-Motor - Multi Air 140 CV y 105 CVPablo Servitec100% (2)
- Freelander 1 MY01 - Manual de Taller - Descripcion y FuncionamientoDocumento635 páginasFreelander 1 MY01 - Manual de Taller - Descripcion y FuncionamientoGerardo Degollado0% (1)
- Como Puedo Aumentar El Rendimiento Al Motor de Mi VochoDocumento24 páginasComo Puedo Aumentar El Rendimiento Al Motor de Mi VochoGato de Tejado100% (4)
- Analisis de Las VibracionesDocumento28 páginasAnalisis de Las VibracionesLissandro Rzr100% (1)
- Desarrollo Del Metodo Bielas y TirantesDocumento14 páginasDesarrollo Del Metodo Bielas y TirantesAlan ValdezAún no hay calificaciones
- Curso moderno de máquinas eléctricas rotativas. Tomo III: Máquinas de corriente alterna asíncronasDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo III: Máquinas de corriente alterna asíncronasAún no hay calificaciones
- Practica 2.2sistema Masa Resorte AmortiguadorDocumento14 páginasPractica 2.2sistema Masa Resorte AmortiguadorGustavo Rubio100% (1)
- Vibraciones Turbina FrancisDocumento12 páginasVibraciones Turbina FrancisVicente GarciaAún no hay calificaciones
- Vibraciones MecanicasDocumento19 páginasVibraciones Mecanicasjose davila100% (1)
- Compresores de Gas Natural 2Documento39 páginasCompresores de Gas Natural 2Anonymous HJZffHvTAún no hay calificaciones
- Conceptos VibracionesDocumento11 páginasConceptos VibracionesAldo Alvarez100% (1)
- 6 Aplicacion de Las Vibraciones Al Mantenimiento 6.1 Medición de Las VibracionesDocumento9 páginas6 Aplicacion de Las Vibraciones Al Mantenimiento 6.1 Medición de Las VibracionesCarlos HernandezAún no hay calificaciones
- Manual AFA IIDocumento233 páginasManual AFA IILuis Torres C.Aún no hay calificaciones
- Aplicación de Las Vibraciones Mecánicas en La Ingenieria IndustrialDocumento24 páginasAplicación de Las Vibraciones Mecánicas en La Ingenieria Industrialwillykb248475% (12)
- Medición de Vibraciones Mecánicas y Técnicas de Corrección de Fallas MecánicasDocumento15 páginasMedición de Vibraciones Mecánicas y Técnicas de Corrección de Fallas MecánicasPedro0% (1)
- Dinamica Unc VibracionesDocumento35 páginasDinamica Unc VibracionesCésar MarinAún no hay calificaciones
- Correccion de Fallas en Rele Micom p127Documento2 páginasCorreccion de Fallas en Rele Micom p127Edgardo Carrillo NavarroAún no hay calificaciones
- Vibraciones Mecánicas en Motores de CombustiónDocumento5 páginasVibraciones Mecánicas en Motores de CombustiónAisha Meluck LinluiAún no hay calificaciones
- Monografo de VibraciónDocumento26 páginasMonografo de VibraciónyokendryAún no hay calificaciones
- Analisis de Vibraciones MecánicasDocumento21 páginasAnalisis de Vibraciones MecánicasNOHEMI ESTHER QUISPE ROMEROAún no hay calificaciones
- R4 LabVibDocumento8 páginasR4 LabVibjavierAún no hay calificaciones
- Actividad Final VibracionesDocumento8 páginasActividad Final VibracionesLeinad RialdaAún no hay calificaciones
- Guia VibracionesDocumento34 páginasGuia VibracionesIGNACIO ANDAURAún no hay calificaciones
- Reporte 6 AF 6.Documento3 páginasReporte 6 AF 6.Paul AguilarAún no hay calificaciones
- TribometroDocumento11 páginasTribometroJAIME MORALESAún no hay calificaciones
- Cuestionario-Mecanismo y VibracionesDocumento3 páginasCuestionario-Mecanismo y VibracionesJorge AlonsoAún no hay calificaciones
- Vibraciones MecanicasDocumento9 páginasVibraciones MecanicasDayner SarricoleaAún no hay calificaciones
- Vibraciones MecanicasDocumento14 páginasVibraciones MecanicasluisrengAún no hay calificaciones
- Trujillol 01Documento33 páginasTrujillol 01dany MartinezAún no hay calificaciones
- Vibraciones Mecanicas PDFDocumento16 páginasVibraciones Mecanicas PDFKeyter Javier CoelloAún no hay calificaciones
- PDF Analisis de Fallas en Motores Electricos CompressDocumento23 páginasPDF Analisis de Fallas en Motores Electricos CompressJosé Isai Campos JuarezAún no hay calificaciones
- Analisis de VibracionesDocumento14 páginasAnalisis de VibracionesOscar FloresAún no hay calificaciones
- Vibraciones MecanicasDocumento5 páginasVibraciones MecanicasEliezer BetancourtAún no hay calificaciones
- Vibración Torsional Con Amortiguación ViscosaDocumento22 páginasVibración Torsional Con Amortiguación ViscosaLaliitaegcAún no hay calificaciones
- Unidad 2 - Dinámica de Motores - Me01 F1 TivDocumento17 páginasUnidad 2 - Dinámica de Motores - Me01 F1 TivYsaac YhofrenAún no hay calificaciones
- Estudio de Las Vibraciones y Aplicaciones en Diversos MediosDocumento16 páginasEstudio de Las Vibraciones y Aplicaciones en Diversos Medios97QUITOAún no hay calificaciones
- Vibraciones MecanicasDocumento40 páginasVibraciones MecanicasCarlos Mossadek Torres CarvajalAún no hay calificaciones
- Monografia de Dinamica EstructuralDocumento25 páginasMonografia de Dinamica EstructuralmarlexirAún no hay calificaciones
- Tarea 3 Wong VibracionesDocumento13 páginasTarea 3 Wong VibracionesAna WongAún no hay calificaciones
- Unidad 2 Tema 2Documento19 páginasUnidad 2 Tema 2Kyred PlayerAún no hay calificaciones
- Informe Absorvedor Dinamico de VibracionesDocumento14 páginasInforme Absorvedor Dinamico de VibracionesAlexander GonzálezAún no hay calificaciones
- UNIDAD II Caracteristicas de La VibracionesDocumento6 páginasUNIDAD II Caracteristicas de La VibracionesAlejoAún no hay calificaciones
- Análisis de Las Vibraciones Mecánicas en El MantenimientoDocumento35 páginasAnálisis de Las Vibraciones Mecánicas en El MantenimientoJhonatan MontalvoAún no hay calificaciones
- Practica2 PDFDocumento5 páginasPractica2 PDFJorge CanalesAún no hay calificaciones
- Física en Procesos Industriales Semana 1Documento7 páginasFísica en Procesos Industriales Semana 1Juan SalazarAún no hay calificaciones
- Asignacion #1 Lab Dinamica AplicadaDocumento6 páginasAsignacion #1 Lab Dinamica AplicadaDerek Ross QuiñonesAún no hay calificaciones
- Qué Son Las VibracionesDocumento5 páginasQué Son Las VibracionesMagdiel Romero VazquesAún no hay calificaciones
- Sem 2 Vibraciones - Sistemas de Un Grado de Libertad PDFDocumento22 páginasSem 2 Vibraciones - Sistemas de Un Grado de Libertad PDFCarlos CácedaAún no hay calificaciones
- Vibraciones - Sistemas de Un Grado de Libertad 2018 - V0Documento22 páginasVibraciones - Sistemas de Un Grado de Libertad 2018 - V0Luis Morales SalvatierraAún no hay calificaciones
- Introduccion A Las Vibraciones MecanicasDocumento31 páginasIntroduccion A Las Vibraciones MecanicasmarlexirAún no hay calificaciones
- Ejpu1 Vibmec FJVHDocumento10 páginasEjpu1 Vibmec FJVHFrancisco Javier Varela HerreraAún no hay calificaciones
- VibracionDocumento12 páginasVibracionjuan david lucumiAún no hay calificaciones
- Filosofia Pdm. Analisis de Vibraciones (Harles Aparicio-Eduin Montañez)Documento4 páginasFilosofia Pdm. Analisis de Vibraciones (Harles Aparicio-Eduin Montañez)Eduin MontañezAún no hay calificaciones
- Estudio de Las Vibraciones y AplicacionesDocumento6 páginasEstudio de Las Vibraciones y AplicacionesCristian HernándezAún no hay calificaciones
- Vibraciones Forzadas No AmortiguadasDocumento23 páginasVibraciones Forzadas No AmortiguadasMichael EstrellaAún no hay calificaciones
- Introducción Al Estudio de Las Vibraciones MecánicasDocumento87 páginasIntroducción Al Estudio de Las Vibraciones Mecánicasusuario1313Aún no hay calificaciones
- Vibraciones Con AmortiguamientoDocumento17 páginasVibraciones Con AmortiguamientoEleonaiAún no hay calificaciones
- Analisis Espectral de Vibraciones: Capitulo IvDocumento58 páginasAnalisis Espectral de Vibraciones: Capitulo IvNelson GArcíaAún no hay calificaciones
- Memoria PYA5438422Documento98 páginasMemoria PYA5438422Anghelo AlcaldeAún no hay calificaciones
- Pruebas de Funcionalidad Master Pac Nw16n1Documento17 páginasPruebas de Funcionalidad Master Pac Nw16n1Edgardo Carrillo NavarroAún no hay calificaciones
- El NoviazgoDocumento6 páginasEl NoviazgoEdgardo Carrillo NavarroAún no hay calificaciones
- Tolerancias DimensionalesDocumento28 páginasTolerancias DimensionalesEdgardo Carrillo NavarroAún no hay calificaciones
- Vibraciones en EngranajesDocumento5 páginasVibraciones en EngranajesEdgardo Carrillo NavarroAún no hay calificaciones
- CAVITACION en Las Bombas CentrifugasDocumento13 páginasCAVITACION en Las Bombas Centrifugaspca97Aún no hay calificaciones
- Fuerzas Radiales - Bombas1Documento3 páginasFuerzas Radiales - Bombas1Edgardo Carrillo NavarroAún no hay calificaciones
- Biela y CasquetesDocumento10 páginasBiela y CasquetesSILVIAAún no hay calificaciones
- BielaDocumento5 páginasBielaJuan EdgarAún no hay calificaciones
- Examen Parcial de Mecanica Basica - Formularios de GoogleDocumento13 páginasExamen Parcial de Mecanica Basica - Formularios de GoogleALEX LABIO FERAún no hay calificaciones
- El Carburador ElementalDocumento2 páginasEl Carburador ElementalFernandoAún no hay calificaciones
- Partes de Un Motor de Combustion InternaDocumento10 páginasPartes de Un Motor de Combustion InternaErick LfernandezAún no hay calificaciones
- TEMA 4. Elementos Del Motor PDFDocumento18 páginasTEMA 4. Elementos Del Motor PDFAntonio Hidalgo GarciaAún no hay calificaciones
- Articulo Técnico de Partes Fijas y MóvilesDocumento11 páginasArticulo Técnico de Partes Fijas y MóvilesWilliam DuckAún no hay calificaciones
- Proyecto - U3 ED1 - Práctica de Simulación, Mediante Software Dedicado, de Un Proceso de MoldeoDocumento15 páginasProyecto - U3 ED1 - Práctica de Simulación, Mediante Software Dedicado, de Un Proceso de MoldeoDavid James RodriguezAún no hay calificaciones
- Reconocimiento de Las Partes de Un MotorDocumento8 páginasReconocimiento de Las Partes de Un MotorDarren DurandAún no hay calificaciones
- Principio de MttoDocumento8 páginasPrincipio de MttoMiguel SantosAún no hay calificaciones
- Usos y Aplicaciones de La ManivelaDocumento6 páginasUsos y Aplicaciones de La ManivelaJorgeZamudio0% (1)
- Guia Calculo Mecanismo Biela ManivelaDocumento75 páginasGuia Calculo Mecanismo Biela ManivelaJesús Cisneros Prado0% (1)
- Ac-Espel-Mai-0430 Análisis Del Tren Alternativo Del Motor Que PDFDocumento8 páginasAc-Espel-Mai-0430 Análisis Del Tren Alternativo Del Motor Que PDFErw DgdfAún no hay calificaciones
- Practica 1 Lab de Diseño de MecanismosDocumento5 páginasPractica 1 Lab de Diseño de MecanismosWilm HosenfeldAún no hay calificaciones
- Informe MOTORESDocumento14 páginasInforme MOTORESFabian DuranAún no hay calificaciones
- El CigüeñalDocumento2 páginasEl CigüeñalYenifer Muñoz CortesAún no hay calificaciones
- Analisis de Operacion Estandar BloqueDocumento6 páginasAnalisis de Operacion Estandar BloqueHenry MoralesAún no hay calificaciones