También podría gustarte
- Proyectos de instalaciones eléctrica de baja tensiónDe EverandProyectos de instalaciones eléctrica de baja tensiónCalificación: 5 de 5 estrellas5/5 (1)
- Perkins 6354 Fase IV CatalogueDocumento58 páginasPerkins 6354 Fase IV CatalogueCarlos Costamagna79% (38)
- Aspectos PreliminaresDocumento2 páginasAspectos PreliminaresPenrillllAún no hay calificaciones
- Diagrama Electrico 2001 PDFDocumento1 páginaDiagrama Electrico 2001 PDFneri_cpg67% (6)
- LIBRO HAGAMOS UNA TESIS Cuarta EdicionDocumento200 páginasLIBRO HAGAMOS UNA TESIS Cuarta EdicionCarolina Yac100% (2)
- ManualECU 2Documento31 páginasManualECU 2Alex Rivera100% (38)
- Conceptos Remunerativos y No RemunerativosDocumento18 páginasConceptos Remunerativos y No RemunerativosAda H. C.Aún no hay calificaciones
- Aplicacion Filtros RTP BUSESDocumento19 páginasAplicacion Filtros RTP BUSESHilario Gayosso CruzAún no hay calificaciones
- Perkins% T 63542Documento54 páginasPerkins% T 63542Pedro Aparicio100% (1)
- Manual Partes Thomas 06-05-2013Documento71 páginasManual Partes Thomas 06-05-2013Daniel Alex SánchezAún no hay calificaciones
- Manual de Partes - Hidrogrubert N9000 - N10000 - N12500Documento62 páginasManual de Partes - Hidrogrubert N9000 - N10000 - N12500German100% (2)
- MC 15018 D PDFDocumento24 páginasMC 15018 D PDFCristo Gonzalez0% (1)
- Regulacion de Sistema Seguridad PDFDocumento9 páginasRegulacion de Sistema Seguridad PDFjulio_apaza_9Aún no hay calificaciones
- Informe Analisis de Flexibilidad - BDocumento18 páginasInforme Analisis de Flexibilidad - BJuan Carlos GarayAún no hay calificaciones
- CT 383 - SCT 1015-1025 Rev. 1 10-11Documento12 páginasCT 383 - SCT 1015-1025 Rev. 1 10-11jonatas alves conceicao100% (1)
- LDL2 Ge DVS Ca CW 103 B PDFDocumento33 páginasLDL2 Ge DVS Ca CW 103 B PDFAnonymous QVPTKMwRyAún no hay calificaciones
- Manual de Partes - Hidrogrubert N5000 - N7000Documento46 páginasManual de Partes - Hidrogrubert N5000 - N7000German100% (3)
- Subgrupos - Ndice: Cap Tulo Grupo ModeloDocumento658 páginasSubgrupos - Ndice: Cap Tulo Grupo ModeloGonzalo Cartez Lobos100% (4)
- NANOBOX Parts ManualDocumento8 páginasNANOBOX Parts ManualPedro BlancoAún no hay calificaciones
- Rekoba Econer-Ekm64Documento9 páginasRekoba Econer-Ekm64dcuatronuno0% (1)
- Resumen Derecho Mercantil Con EjemplosDocumento124 páginasResumen Derecho Mercantil Con EjemplosShannon Brewer100% (2)
- Plan Especifico SihoaDocumento184 páginasPlan Especifico SihoaFrancisco Cabello Allen100% (1)
- Catalogo 2011Documento76 páginasCatalogo 2011Andres Pardo100% (3)
- 3186 Esquemas EPLANDocumento92 páginas3186 Esquemas EPLANYahyaMoummou100% (2)
- Informe Tecnico Multicor S300 MarzoDocumento26 páginasInforme Tecnico Multicor S300 MarzoJuan Carlos Saavedra Martinez100% (1)
- Vale Virtual 25-04-23Documento456 páginasVale Virtual 25-04-23MARCOS SAENZAún no hay calificaciones
- PPI-proyecto Pedagógico IndividualDocumento2 páginasPPI-proyecto Pedagógico IndividualEmilia HissaAún no hay calificaciones
- PDF - Herramientas de 2da en FeriaDocumento10 páginasPDF - Herramientas de 2da en Feriajuan rebazaAún no hay calificaciones
- Consulta de PCC (4) 2Documento9 páginasConsulta de PCC (4) 2mexicanh2oAún no hay calificaciones
- BDM IP3 Ene 2015Documento80 páginasBDM IP3 Ene 2015hector matosAún no hay calificaciones
- Estructura de Costos EneroDocumento80 páginasEstructura de Costos EneroCarlitoss Luiss VelizAún no hay calificaciones
- SP-003-22 Carta de Garantía-IME CONTRATISTAS GENERALES S.A.C 16.05.22Documento2 páginasSP-003-22 Carta de Garantía-IME CONTRATISTAS GENERALES S.A.C 16.05.22Harold William Palacios AguilarAún no hay calificaciones
- AforosDocumento51 páginasAforosFernando EscamillaAún no hay calificaciones
- Obras CivilesDocumento12 páginasObras CivilesAlberth HernandezAún no hay calificaciones
- GT 1 Boroscope Inspecction Report WebDocumento29 páginasGT 1 Boroscope Inspecction Report Webemanuel tvAún no hay calificaciones
- Equipos Planta Relacion de MotoresDocumento20 páginasEquipos Planta Relacion de MotoresElmer HuashuayoAún no hay calificaciones
- Calculo Espesores PavimentoDocumento46 páginasCalculo Espesores PavimentoFernando EscamillaAún no hay calificaciones
- Catálogo de Especificaciones Técnicas Generales de Equipo ElectromecánicoDocumento711 páginasCatálogo de Especificaciones Técnicas Generales de Equipo ElectromecánicoJonathanAguilarPalomeraAún no hay calificaciones
- Catalogo Masanparts 2013Documento55 páginasCatalogo Masanparts 2013MAQUINARIAPESADA100% (1)
- Equipos Propuestos PropiosDocumento1 páginaEquipos Propuestos PropiosThalia Sanchez ReyesAún no hay calificaciones
- General Electric DictamenDocumento8 páginasGeneral Electric DictamenoriginalesfordAún no hay calificaciones
- CatalogoDocumento148 páginasCatalogoCarlos SanchezAún no hay calificaciones
- Control de Planos Generados Informe GestiónDocumento14 páginasControl de Planos Generados Informe GestiónMau Atenas PerezAún no hay calificaciones
- Ventilador Gel 9-86Documento50 páginasVentilador Gel 9-86Deme Juarez100% (2)
- Comprobacion de Las Luces de La Caja de ControlDocumento11 páginasComprobacion de Las Luces de La Caja de ControlLuis HernandezAún no hay calificaciones
- Estandarizacion de Bombas HidraulicasDocumento3 páginasEstandarizacion de Bombas Hidraulicasrichard miranda medinaAún no hay calificaciones
- Informe Mensual Marzo MMM 2014Documento21 páginasInforme Mensual Marzo MMM 2014Gabriela SanchezAún no hay calificaciones
- Esquema de Circuitos Eléctricos de La Aire AcondicionadoDocumento5 páginasEsquema de Circuitos Eléctricos de La Aire AcondicionadoincidenciasautelAún no hay calificaciones
- 0.005 Plataforma Elevadora Mtto B-4aDocumento17 páginas0.005 Plataforma Elevadora Mtto B-4aAnonymous nwhnVUpAún no hay calificaciones
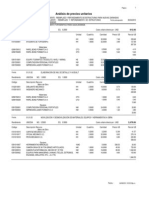
- 2.0 Analisis de Costos UnitariosDocumento18 páginas2.0 Analisis de Costos UnitariosAnthony Gaona LunaAún no hay calificaciones
- Cotización #:: Según Resolución No. 136 de 27 Contribuyente Especial RUC: 0991159509001Documento3 páginasCotización #:: Según Resolución No. 136 de 27 Contribuyente Especial RUC: 0991159509001Lu Viny AndradeAún no hay calificaciones
- Planos As-Built P-1042103759 MaperDocumento22 páginasPlanos As-Built P-1042103759 MaperDaniel BauttoAún no hay calificaciones
- Filtros CatDocumento2 páginasFiltros CatFabián ArenaAún no hay calificaciones
- Schneider Electric - Tarifa Envolventes y Sistemas de Instalación Prisma Marzo 01.03.2023pDocumento70 páginasSchneider Electric - Tarifa Envolventes y Sistemas de Instalación Prisma Marzo 01.03.2023pAlberdialAún no hay calificaciones
- Controle de Calibração de EquipamentosDocumento3 páginasControle de Calibração de EquipamentosSTC Sistemas de ProcessoAún no hay calificaciones
- Presupuesto GeneralDocumento75 páginasPresupuesto GeneralRivaldo EMAún no hay calificaciones
- Respuestas Observaciones DossierDocumento8 páginasRespuestas Observaciones DossierJonathanAún no hay calificaciones
- Catalogo ThomasDocumento288 páginasCatalogo Thomasedwan lancherosAún no hay calificaciones
- Control de Componentes (OC) - YV2792Documento9 páginasControl de Componentes (OC) - YV2792Jordan Orlando Rojas MarinAún no hay calificaciones
- STATUS Incidentes AmbientalesDocumento19 páginasSTATUS Incidentes AmbientalesALexander HuancahuireAún no hay calificaciones
- Cge S.A.: Ingeniería de Detalles Ampliación Subestación Caldera 110/23 KVDocumento20 páginasCge S.A.: Ingeniería de Detalles Ampliación Subestación Caldera 110/23 KVRODRIGO ALEJANDRO FRITIS LOPEZAún no hay calificaciones
- Grupo 2 PDFDocumento12 páginasGrupo 2 PDFfreddgar86Aún no hay calificaciones
- RSC 041 R 02 SpaDocumento212 páginasRSC 041 R 02 SpajuanAún no hay calificaciones
- INDICE Carpeta TecnicaDocumento5 páginasINDICE Carpeta TecnicaJuan Rodriguez ArevaloAún no hay calificaciones
- Listado de Preusos Herramientas y Equipos SSMMDocumento3 páginasListado de Preusos Herramientas y Equipos SSMMnegrourbinaAún no hay calificaciones
- U4C-PROD DIV 5A0 PO - 3553096 - Britransformadores S.A. - 230054Documento2 páginasU4C-PROD DIV 5A0 PO - 3553096 - Britransformadores S.A. - 230054Juan Carlos ParedesAún no hay calificaciones
- Otro Trabajo Ser Humano y Desarrollo Sostenible TrabajoDocumento4 páginasOtro Trabajo Ser Humano y Desarrollo Sostenible Trabajobrigitmimi100% (1)
- DictadosDocumento5 páginasDictadosMichael SaxosusAún no hay calificaciones
- Características Del Neobarroco y Relación Con La ComunicaciónDocumento2 páginasCaracterísticas Del Neobarroco y Relación Con La ComunicaciónSerafín IlvayAún no hay calificaciones
- Evaluación Del Acuífero de Lima Perú y Medidas Correctoras paraDocumento10 páginasEvaluación Del Acuífero de Lima Perú y Medidas Correctoras paraCristhian Apaza PeraltaAún no hay calificaciones
- Pre-Cosecha y Post Cosecha Del MangoDocumento14 páginasPre-Cosecha y Post Cosecha Del MangoCarlos RobertoAún no hay calificaciones
- Examen T2 - Electrohidráulica y ElectroneumáticaDocumento6 páginasExamen T2 - Electrohidráulica y ElectroneumáticaJosé BarrazaAún no hay calificaciones
- Nuevo Documento de Microsoft WordDocumento3 páginasNuevo Documento de Microsoft WordErwin Segurondo AramayoAún no hay calificaciones
- IntroducciónDocumento5 páginasIntroducciónIngrid AmoresAún no hay calificaciones
- Consentimiento - Informado PDP PDFDocumento2 páginasConsentimiento - Informado PDP PDFAngel DavidAún no hay calificaciones
- Res 25-01516-2021 - (25) - Adopcion Manual Convivencia Internado Cba 9512Documento24 páginasRes 25-01516-2021 - (25) - Adopcion Manual Convivencia Internado Cba 9512bienestar_cbaAún no hay calificaciones
- Manual de Principios VisualDocumento42 páginasManual de Principios VisualAngélica LeónAún no hay calificaciones
- Modelo de Cambio LewinDocumento11 páginasModelo de Cambio LewinlisetAún no hay calificaciones
- Practica 5Documento64 páginasPractica 5Rubio Monroy JocelynAún no hay calificaciones
- Miguelmagañasistemas EcuacionesrepasoDocumento6 páginasMiguelmagañasistemas EcuacionesrepasomigAún no hay calificaciones
- Resumen Historia Del ArteDocumento15 páginasResumen Historia Del ArteValentina DiezAún no hay calificaciones
- Anexo 1 - Paso 2 - Reconocimiento Del Recurso SueloDocumento6 páginasAnexo 1 - Paso 2 - Reconocimiento Del Recurso SueloWillinton Duarte RivasAún no hay calificaciones
- Sensores de ViscosidadDocumento8 páginasSensores de ViscosidadAlfredo GallardoAún no hay calificaciones
- Enfoques de Investigación EducativaDocumento4 páginasEnfoques de Investigación EducativaJoel De JesusAún no hay calificaciones
- Publicacion Auxiliares 2021Documento17 páginasPublicacion Auxiliares 2021Pedro Tonny Luyo MendietaAún no hay calificaciones
- 3 Erocona 2019Documento6 páginas3 Erocona 2019AldrynOscarAparcanaOrellanaAún no hay calificaciones
- 02 Guía de Laboratorio - DBA - 202210Documento5 páginas02 Guía de Laboratorio - DBA - 202210SERGIO BRAYAN BUSTAMANTE VILLAVERDEAún no hay calificaciones
- Redacción de Un Informe de Lectura de La Prueba Raven Especial - Tareas - ALTAGRACIA MERCEDEDocumento7 páginasRedacción de Un Informe de Lectura de La Prueba Raven Especial - Tareas - ALTAGRACIA MERCEDEFrancris David Peralta PeñaAún no hay calificaciones
- Caracteristicas Geometricas Del Acero de RefuerzoDocumento1 páginaCaracteristicas Geometricas Del Acero de RefuerzoMarilyn AnzoraAún no hay calificaciones